 KUKA機器人KLI網絡分析-KLIconfig.XML
KUKA機器人KLI網絡分析-KLIconfig.XML
庫卡線路接口 (KUKA Line Interface,KLI)
KLI 是用于耦聯主控層面的接口, 它將外置輸入 / 輸出端與 IT 連接裝置組合成一體, 并且可與一個工業以太網轉換器及 / 或一個客戶網絡以太網轉換器相連接。
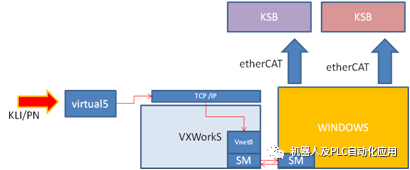
KLI 始終與 VxWorks 側進行通訊。與 Windows 只可通過選定的端口才能連接,具體端口已在 KSS 8.x 出廠時預設完畢。這種連接可通過存檔功能、文件共享功能、遠程桌面協議或WorkVisual 來建立。
KLIconfig.XML 存儲文件存儲的內容
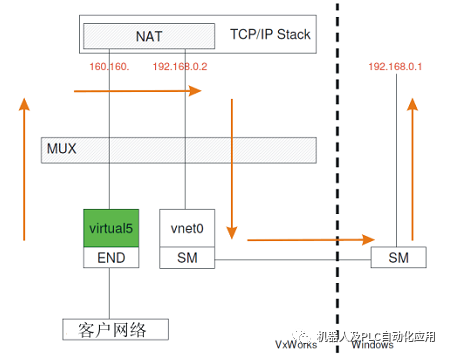
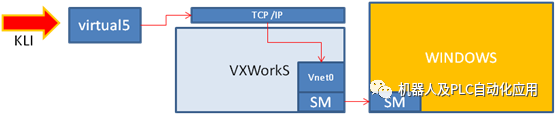
KLI :KUKA Line Interface (庫卡線路接口).
SM:共享存儲的驅動程序,VxWork 和 Windows 之間的虛擬網絡接口
vnet0:VxWorks 邏輯虛擬接口至 Windows 層面
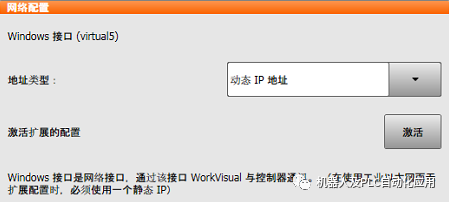
virtual 5(虛擬接口):VLAN 5 通過 KLI 接口
KLI 的運作方法有兩種:
? 用一個靜態 IP 地址
? 用一個動態 IP 地址
注意:
如已將虛擬網絡 virtual5 設定為 DHCP,則無法進行工業以太網通訊。PROFINET 通訊 僅可通過 virtual5 實現。
KUKA的系統WINDOWSTCP/IP地址192.168.0.1 和VxWork的TCP/IP地址192.168.0.2
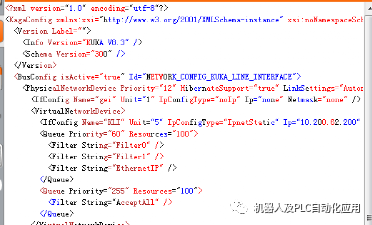
KLIconfig.xml 程序文件:
NAT:網絡地址轉換
虛擬網絡設備
Profinet地址:10.200.27.150

虛擬網絡結束
網絡設置程序結束
規則:

WINDOWS將數據發送到內部端口ICMP/TCP,ICMP:Internet控制報文協議
map [GlobalNatInterface] [host:WINDOWS] ->0/32 portmap tcp/udp 18000:18999
map [GlobalNatInterface] [host:WINDOWS] ->0/32 icmpidmap icmp 19000:19999
WINDOWS將數據接收從內部TCP端口
rdr [GlobalNatInterface] [addr] port 3389 ->[host:WINDOWS] port 3389 tcp proxy RemoteIP
NAT:
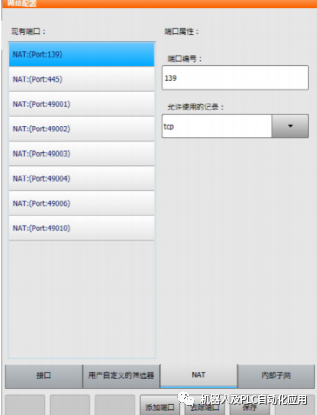
rdr [GlobalNatInterface] [addr] port 139 ->[host:WINDOWS] port 139 tcp
rdr [GlobalNatInterface] [addr] port 445 ->[host:WINDOWS] port 445 tcp/udp
rdr [GlobalNatInterface] [addr] port 49001 ->[host:WINDOWS] port 49001 tcp
rdr [GlobalNatInterface] [addr] port 49002 ->[host:WINDOWS] port 49002 tcp
rdr [GlobalNatInterface] [addr] port 49003 ->[host:WINDOWS] port 49003 tcp
rdr [GlobalNatInterface] [addr] port 49004 ->[host:WINDOWS] port 49004 tcp
rdr [GlobalNatInterface] [addr] port 49006 ->[host:WINDOWS] port 49006 tcp
rdr [GlobalNatInterface] [addr] port 49010 ->[host:WINDOWS] port 49010 tcp
1.此配置頁包含了所有 NAT 規則,用于在 VxWork 和 Windows 7 之間進行數據包傳輸。
2.這些均可根據客戶需要進行調整。
3.所有的 49xxx 端口均用于與 WorkVisual 通訊。如果刪除了一個端口,則相應的在線功能 (示波器)也不再可用。
程序結束
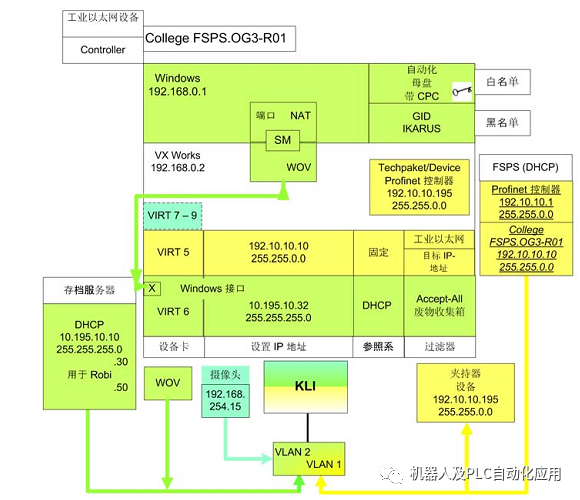
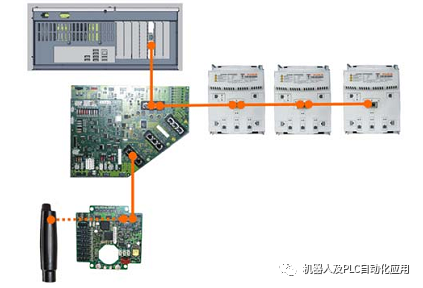
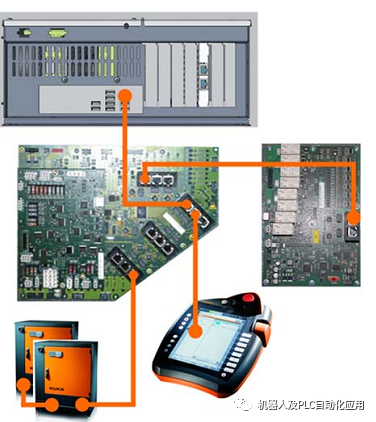
擴展機器人整體系統分析圖:
? PLC 功能,用于通過 PROFINET 現場總線輸入 / 輸出端
? F-PLC 功能,用于通過 PROFIsafe 的安全輸入 / 輸出端(例如緊急停機)。
KCB
KSB
控制系統與顯示器通過 RDP (RDP=R emote D esktop P rotocol,遠程桌面協議)而銜接。
RDP - 遠程桌面協議
利用 RDP (遠程桌面協議),可從某一工位遠程訪問一臺已網絡連接的電腦。屏幕內容將通過一個漸隱窗口顯示到該工位里,操作人員就好像直接坐在該電腦面前一樣。可利用例如鼠標和鍵盤等外圍設備執行全套操作。如今有很多的免費的 RDP 程序可利用一個 Wizard 來簡便操作。為可通過互聯網建立一個安全的連接,應采用 RC4 加密算法。
微軟的操作系統 Windows XP 里已備有一個遠程桌面機制。
由于 KLI 在 VX-Works 里接收管理,所以 Microsoft RDP 不能憑借 KLI 在 KR C4 里使用。
Microsoft RDP 只能通過現場的控制柜 (CCU ) 服務端口 X43 而被使用。
VXWORK 系統的作用:
VxWorks 是一個具有微內核、可裁剪的高性能強實時操作系統, 在實時操作系統市場上處于領先地位。VxWorks 是由wRS(wind River Systems , Inc.)公司開發的一套具有微內核、高性能、可伸縮的實時操作系統, 支持廣泛的網絡通信協議, wRS 公司還提供了優秀的實時操作系統開發工具Tornado。Tornado 能夠支持Windows 、Unix 等流行的工作平臺和PowerPC、X86 、ARM 等幾乎所有的目標處理器, 所提供的工具可用于所有目標機。除了基本的功能和開發工具外, Tornado還具有先進的系列網絡產品, 極大地擴展了Tornado的網絡特性, 并增強了嵌人式微處理器的網絡特性。
使用TCP 進行網絡通信時每個連接包括一個服務器和客戶。通常情況下, 為了使用方便, 把下位機( VxWorks 端) 做為服務器, 把上位機( Windows 端) 做為客戶機。
責任編輯:lq
-
機器人
+關注
關注
213文章
29504瀏覽量
211605 -
以太網
+關注
關注
40文章
5585瀏覽量
174837 -
網絡分析
+關注
關注
0文章
31瀏覽量
11963
原文標題:KUKA機器人KLI網絡分析-KLIconfig.XML
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄






 工商網監
工商網監
評論