 快換頭故障維修的難度
快換頭故障維修的難度
工位背景:機器人帶抓手抓件,將抓手放到工位里,然后PLC和夾具將機器人抓手固定,機器人于抓手脫開,其他機器人開始焊接,工作結束后機器人在去抓抓手,離開工位,再去抓件。
故障維修的難度:
由于抓手夾具和PLC結合控制需要關閉安全門控制夾具實現順序控制,這樣我們很難觀察到故障發生的第一時間只能是觀察機器人IO判斷.
機器人抓抓手時沒有任何故障,只有當機器人脫開抓手時才會報錯沒有E540 .
原因分析:
編程分析:
--------放下抓手軌跡:
PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
-- Undock GreiferPosition – 放下抓手的位置
LIN VB=200[mm/s] VE=0% ACC=100% RobWzg=1Base=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS E58
4: -- (A75) Werkzeugfreigabe 6 PF2V3112020 WZ1Z33-34 Steuern V/R --
5: A75 = EIN -----機器人到位后發出可以PLC和夾具
6: -- (E75) Stellungsfreigabe 6MS2V2 112016 Teil Einlegen ausfahrt --
7: WARTE BIS E75 -----PLC允許機器人離開故障
8: A75 = AUS -----關閉機器人允許PLC合夾具故障.
9: TECH3_ PN-Docken ID-Nr =145Abschalten EIN 關閉網絡
10: WARTE ( EIN ) ZEIT 5 [1/10Sek] 等待時間
11: WARTE BIS E23
12: A23 = EIN
13: SPSMAKRO422 = !E540 快換頭復位
14: SPSMAKRO420 = EIN 打開快換頭發出A539,脫開快換頭.
15: FB PSPS = E42 & E46 &E58 & E75 & E80 & M30
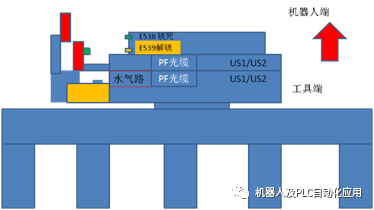
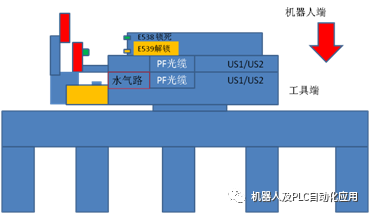
---在發出打開快換頭的解鎖信號A539時,此時安全擋塊沒有被安全模塊檢測到,因此快換頭再次報錯沒有E540.

“解鎖”信號故障
在標準版本中如果“解鎖”信號已設定,而安全開關未激活,此狀態將被識別為故障, LED H5亮紅燈,經過2秒延遲后H6亮紅燈
-- After Undock GreiferPosition –脫開抓手的位置
LIN VB=150[mm/s] VE=0% ACC=100% RobWzg=32 Base=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS E23
4: A23 = EIN
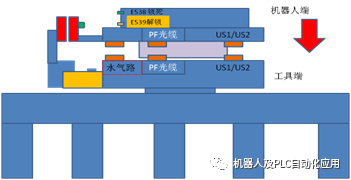
5: A539 = AUS ---到達脫開位置后關閉脫開閥控制。
6: FB PSPS = E42 & E46 & E58 & E75 & E80 & M30
PTP VB=100% VE=0% ACC=100% RobWzg=32 Base=1 SPSTrig=0[1/100s] P
--------放下抓手軌跡:
PTP VB=100% VE=100% ACC=100% RobWzg=32 Base=1 SPSTrig=0[1/100s] P
-- Before Dock GreiferPosition – 抓件前位置
LIN VB=100[mm/s] VE=0% ACC=100% RobWzg=32 Base=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
3: WARTE BIS E23
4: A23 = EIN
5: SPSMAKRO422 = !E540 -----故障復位
6: A539 = EIN -----打開快換頭解鎖
7: WARTE BIS !E538 & E539 &E540
8: FB PSPS = E42 & E46 & E58& E74 & E80 & !E538 & E539 & M30
-- Dock Greifer Position -- 抓件位置
LIN VB=100[mm/s] VE=0% ACC=100% RobWzg=32Base=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
2: SPSMAKRO422 = !E540 -----故障復位
3: SPSMAKRO421 = EIN -----打開快換頭鎖死
4: A23 = AUS
5: TECH3_ PN-Docken ID-Nr =145Zuschalten EIN -----抓手給網
6: WARTE ( EIN ) ZEIT 1 [1/10Sek]
7: A75 = EIN -----機器人允許PLC夾具打開
8: WARTE BIS E73 -----等待PLC釋放
9: A75 = AUS ------關閉機器人允許PLC夾具打開
10: F1 = EIN
11: F3 = EIN
12: SPSMAKRO342 = EIN 打開夾爪
13: SPSMAKRO340 = EIN 關閉閥
14: WARTE BIS M31 & M35
15: F2 = EIN
16: F4 = EIN
17: SPSMAKRO342 = EIN 打開夾爪
18: SPSMAKRO340 = EIN 關閉閥
19: WARTE BIS M31 & M33 &M35 & M37 & M81
20: WARTE BIS E23
21: A23 = EIN
22: FB PSPS = E42 & E46 &E73 & E80 & M30 & M31 & M33 & M35 & M37 & M81
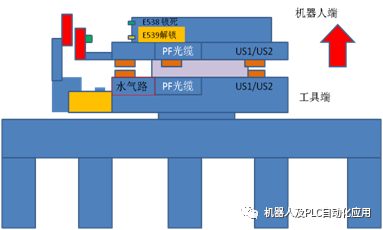
----------當機器人進行抓件時—機器人快換頭的安全開關已經檢測不到安全擋塊了,E540沒有開始自動閉合鎖死閥,此時因為有E538可以實現抓件。
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1SPSTrig=5[1/100s] P
措施:
檢查機器人放抓手軌跡,放件軌跡有偏差,抓手的放件平面傾斜,優化機器人放抓手軌跡.
優化機器人托開上升軌跡.
檢查快換頭連線沒有問題.
分析程序,分析脫開時序.
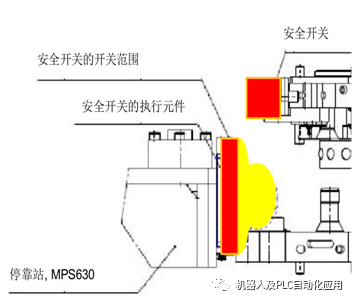
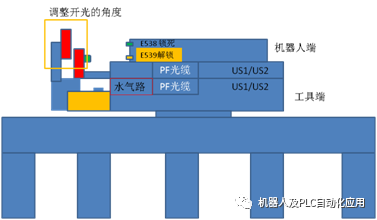
有安全擋板有點小所以,調整安全開關檢測擋板的角度,故障排除.
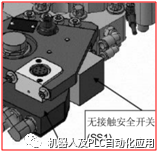
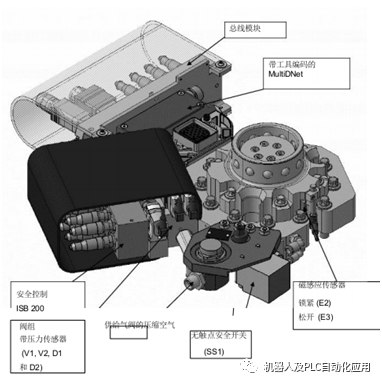
安全檢測開關

安全擋塊
安全檢測開關與安全擋板的檢測范圍:
解決方法:
---------------安全開關故障--------------

安全開關故障:沒有E540
如果安全開關出現故障,模塊將會輸出故障信號,并且通過LED H3亮紅燈來指示。
------------------- “解鎖”信號故障------------------
責任編輯:lq
-
機器人
+關注
關注
213文章
29533瀏覽量
211706 -
plc
+關注
關注
5031文章
13781瀏覽量
472461 -
焊接
+關注
關注
38文章
3400瀏覽量
61024
原文標題:快換頭故障的一些感悟
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
電源盒維修與故障診斷
驅動器常見故障維修
變頻器電路維修與故障實例分析
伺服電機編碼器故障及維修

紅外接收頭的故障有哪些_紅外接收頭的壽命一般是多少
單片機出現故障怎么維修
自動快換助力協作機器人實現“彎道超車”
彎式N頭常見的故障






 工商網監
工商網監
評論