 納米機器人及其生物醫學應用的研究綜述文章
納米機器人及其生物醫學應用的研究綜述文章

近日,IEEE ransactions on Biomedical Engineering(2021, 68(1): 130-147)以封面文章形式發表了中國科學院沈陽自動化研究所微納米課題組關于納米機器人及其生物醫學應用的研究綜述文章Progress in nanorobotics for advancing biomedicine。該論文基于課題組在納米操作機器人單細胞單分子探測方面的研究成果,系統總結了近年來納米機器人技術應用于生物醫學領域取得的進展,并展望其未來發展前景。
沈陽自動化所發表納米機器人及其生物醫學應用研究綜述文章
納米機器人技術是指開發可在納米尺度執行任務(如感知、驅動、操作、推進、控制、協同等)的機器人設備/系統。納米機器人技術研究在近年來取得了進展,一方面,出現了自身尺寸在納米尺度的納米機器人(如DNA納米機器人),可以裝載藥物分子并隨著血流將藥物分子輸運至特定地點(如癌細胞)以實施在體單細胞精準給藥;另一方面,出現了本體是宏觀尺寸,但末端執行器可對納米物體進行機器人化操作的納米操作機器人。納米機器人技術的研究進展為生物醫學領域科學問題的解決及臨床疾病診療提供了新機遇。
中國科學院沈陽自動化研究所微納米課題組聯合國內多家醫院,在微納機器人技術與生物醫學交叉融合方面,開展了系統性的理論及實際應用研究工作,建立了從分子、細胞到組織的多尺度多參數微納生物觀測與操控方法體系,提升了微納機器人探測微弱生理信號的能力,探索了微納機器人技術在臨床活檢樣本檢測分析中的具體應用,為癌癥個性化診療提供了新思路。相關研究成果先后發表在Science Advances、Nature Communications、Small、Nano Research、ACS Applied Materials & Interfaces、IEEE Transactions on Communications等上。
研究工作得到國家自然科學基金委員會、中科院與沈陽自動化所機器人學國家重點實驗室的支持。
責任編輯:lq
-
自動化
+關注
關注
29文章
5780瀏覽量
84810 -
生物醫學
+關注
關注
0文章
47瀏覽量
11328 -
納米機器人
+關注
關注
0文章
43瀏覽量
11868
原文標題:沈陽自動化所發表納米機器人及其生物醫學應用研究綜述文章
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
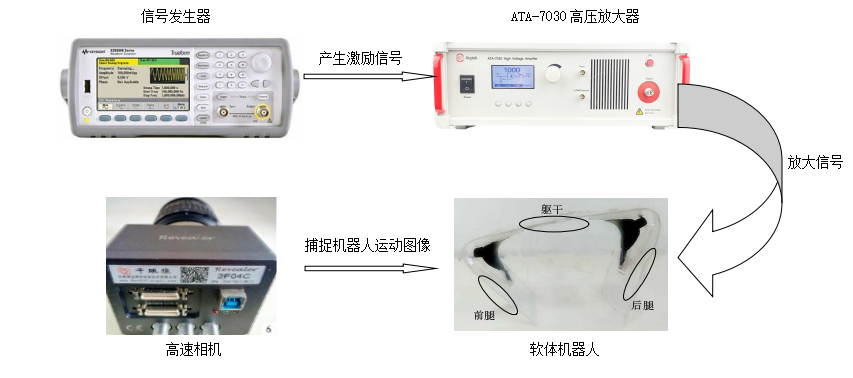
安泰高壓放大器在微納機器人研究中的應用介紹
輪式移動機器人電機驅動系統的研究與開發
盤點#機器人開發平臺
清華大學:軟體機器人柔性傳感技術最新研究進展

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
功率放大器應用:超聲波換能器從材料策略到生物醫學的應用
基于漩渦湍流輔助的微流控平臺,可實現類精子結構的微型機器人一步成型

醫療機器人有哪些_醫療機器人有哪些應用

柔性機器人與剛性機器人區別與聯系






 工商網監
工商網監
評論