 如何用電線建造一個簡單的機器人?
如何用電線建造一個簡單的機器人?

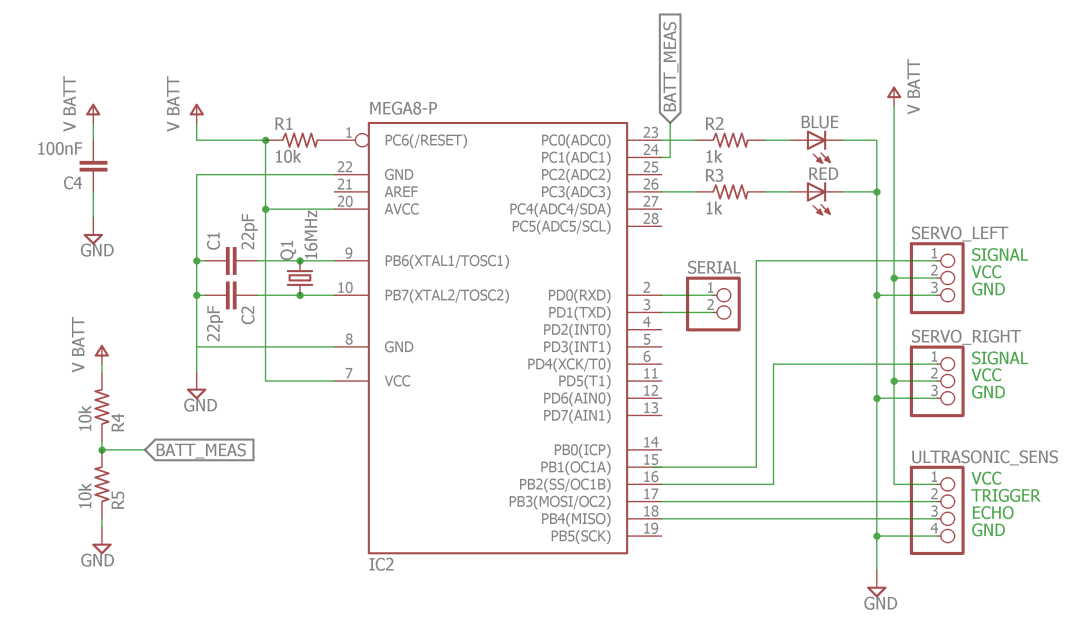
這是一個微型機器人,其底盤是由零件盒中的電感器得到的廢線制成的。伺服電機被砍斷以進行連續旋轉。ATmega8運行Arduino代碼以控制伺服器并輪詢超聲傳感器以避開障礙物。
你要準備的:
數量 x組件名稱
1× ATmega8微處理器,微控制器,DSP / ARM,基于RISC的微控制器
1 × DIL28插座 2 × 1K電阻 3 × 10K電阻
1× 3.7 600mAh鋰電池
1× 公頭
1× 超聲波傳感器(HCSR 04)
1× 少量電磁線
1× 16MHz晶體
2 × 22pF陶瓷電容器
1× 100nF陶瓷電容器
2 × 微型伺服器可連續旋轉
最后安裝電池和電源開關。我嘗試過使用反極性保護功能,但是我在這里擁有的所有MOSFET似乎都無法在電池提供的低電壓下達到飽和。最后我買了這個3.7脂電池為機器人供電,它很輕,可以提供足夠的電壓和電流為電路供電。
該電路在3.7V的電壓下似乎可以正常工作,所以我很高興不必添加一個升壓電路,這會浪費電源,并且與項目的整體外觀不符。鋰電池已知會引起麻煩,因此我至少要多加注意。
這些電池不能過度放電,因此我使用了一個免費的模擬引腳來監視電池的電壓,該電壓多少可以表示電池的電量。我添加了一個電阻分壓器(圖中未顯示,因為它在微控制器下方),該分壓器連接至模擬引腳。該電阻分壓器將電池電壓減半(最大值為4.2V),然后由微控制器讀取(最大值為2.1V)。隨著電池電壓的變化,將使用微控制器的內部基準代替VCC。值得慶幸的是,Arduino允許人們輕松更改微控制器ADC的參考電壓,而無需直接寄存器操作。所以我用:AnalogReference(INTERNAL); //將ADC參考設置為內部2.56V參考
注意:ATmega8的內部基準電壓為2.56V,但是大多數AVR Arduino板實際上都具有1.1V基準。由于電池電壓(3.7-4.2V)高于內部參考電壓(2.56V),我們需要一些技巧來測量它。我做了一個簡單的電阻分壓器。我使用了這些藍色電阻器,我沒有電表就無法讀取它們,但精度很高(1%)。兩個10K電阻將電池電壓最大分壓為2.1V。
可以使用Arduino IDE編程使用的ATmega8。我使用mega8是因為我有很多,但也可以使用ATmega328p。要使用Arduino IDE編程ATmega8,只需從“工具”菜單中選擇Arduino NG或更早版本 和ATmega8。
然后選擇您擁有的程序員。如果您沒有獨立的程序員,則可以使用Arduino,只需在線搜索“ Arduino as ISP”最好一次使用“ Burn Bootloader”選項,即使您不打算使用它,也可以將正確的保險絲值編程到芯片中。
微控制器需要配置為使用外部晶振,這是通過指定的位(稱為熔絲位)與代碼分開進行的,并且在上載新代碼時不會復位。Burn Bootloader選項會自動執行此操作,然后您可以使用“使用編程器上傳”工具覆蓋Bootloader,該工具可將熔絲位保持編程狀態。
然后,您可以使用“使用編程器上傳”選項對芯片進行編程。只需在“草圖”菜單下選擇。跳過引導加載程序會為您提供額外的閃存,但是我之所以使用它只是因為ATmega8的引導加載程序需要花費很多時間來啟動主代碼。
原文標題:電線建造一個簡單的機器人?來,跟著國外大神學
文章出處:【微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
開關電源
+關注
關注
6508文章
8590瀏覽量
489773 -
機器人
+關注
關注
213文章
29726瀏覽量
212798 -
電感
+關注
關注
54文章
6200瀏覽量
104187
原文標題:電線建造一個簡單的機器人?來,跟著國外大神學
文章出處:【微信號:cirmall,微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論