 采用視覺一點法計算TCP
采用視覺一點法計算TCP
1. 假設相機已經與機器人做過標定,相機能直接給出對應特征點在機器人wobj0(世界坐標系)下的坐標,則可以利用當前特征點坐標和當前機器人tool0的笛卡爾坐標,直接獲得當前TCP。
其中,Pcam為當前工具在機器人世界坐標系下的值x100,y100,z100,a100,b100,c100,
PTool0為當前tool0在機器人世界坐標系下的值x0,y0,z0,a0,b0,c0,
TCP.tframe為待計算的TCP坐標系xt,yt,zt,at,bt,ct.
由于Pcam(由相機提供數據,對于平面相機,可以事先固定Z和RX,RY,僅使用相機提供的X,Y和THETA)和PTool0已知,則
PTool0-1*Pcam= PTool0-1*PTool0*TCP.tframe (兩邊左乘PTool0矩陣的逆矩陣)
整理得到:
TCP.tframe= PTool0-1*Pcam
Pose數據的相乘和求逆,可以使用ABB機器人PoseMult和PoseInv函數實現
審核編輯 黃昊宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
ABB機器人
+關注
關注
15文章
89瀏覽量
30105 -
數據類型
+關注
關注
0文章
237瀏覽量
13808
發布評論請先 登錄
相關推薦
熱點推薦
用LMP91200采集PH信號,LMP91200輸出的電壓會一點一點下降,是什么原因導致的?
我用LMP91200采集PH信號。在前段信號無變化的情況下,LMP91200輸出的電壓會一點一點下降。電路連接我是參考LMP91200開發板的。
請問可能是什么原因?需要采取什么措施解決?
發表于 02-05 06:12
云數據庫和云主機哪個好一點?
云數據庫和云主機哪個好一點?云主機和云數據庫各有優勢,選擇哪個更好取決于具體需求。云主機提供虛擬化的計算資源,適用于運行各種應用;而云數據庫專注于數據存儲和管理,適合高效數據處理。兩者都具有高性能
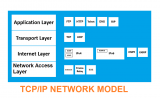
一文了解TCP/IP協議
TCP/IP協議是現代計算機網絡通信的基礎,是互聯網及局域網廣泛使用的一套協議。TCP/IP協議集包括許多協議,其中最重要的是傳輸控制協議(TCP
abb機器人工具坐標系問題
各位大佬請教一下,abb機器人工具坐標系用四點法,六點法,手動輸入等方式標定出的工具坐標系的Z方向與實際工具的長度不符,實際工具長度越長坐標系z方向的差距越大。比如實際工具400mm坐標系標定的Z方向是300mm,這種是什么情況
發表于 08-07 11:11
VPLC系列機器視覺運動控制一體機在五軸聯動點膠上的應用
技術針對現有市場需求,開發了一種基于VPLC系列機器視覺運動控制一體機的五軸聯動點膠解決方案,適用于各種復雜型面工件的高精度點膠和各種膠水。
發表于 07-29 14:29
計算機視覺與人工智能的關系是什么
引言 計算機視覺是一門研究如何使計算機能夠理解和解釋視覺信息的學科。它涉及到圖像處理、模式識別、機器學習等多個領域的知識。人工智能則是研究如
計算機視覺的主要研究方向
計算機視覺(Computer Vision, CV)作為人工智能領域的一個重要分支,致力于使計算機能夠像人眼一樣理解和解釋圖像和視頻中的信息





 工商網監
工商網監
評論