 電影里的磁性球體機器人成真?
電影里的磁性球體機器人成真?

提起機器人,很多人都會直覺地聯想到機械狀的人形,或者是像波士頓動力狗一般的四足仿生機器人。它們模擬人或者其他動物的肌肉和骨骼結構。其實“機器人”的范疇遠遠不止于此,電影《超能陸戰隊》就展示了另外兩種對于“機器人”的想象,一個是有柔軟皮膚,又會主動安慰人的“大白”;一個是由無數微磁單元組成、任意變形的機器人。
這種類型的機器人叫做模塊化自重構機器人(Modularself-reconfigurable robot, MSRR)。這種機器人屬于一種特殊的多機器人系統,由大量同構的機器人模塊組成。相比于形態固定的機器人,這類機器人功能多樣、可擴展性強、也具有更強的魯棒性。 “《超能陸戰隊》里面這個例子,是我覺得是MSRR最終希望做到的,有點像生物的細胞,幾百億甚至幾千億個小細胞作為單元,組成了一個龐大而且復雜的生命共同體,最終這個共同體能夠根據需求自由地改變形狀及功能。”香港中文大學(深圳)理工學院的梁冠琪對 DeepTech 說。目前,他在該校的機器人與人工智能實驗室讀博二,導師是實驗室執行副主任林天麟教授。林天麟教授是IEEE高級會員,師從中國工程院院士徐揚生教授。 前不久,梁冠琪作為第一作者的論文獲得了IEEE智能機器人與系統國際會議(IROS)的機器人機構設計(Robot Mechanism and Design)最佳論文獎。獲獎的是一種叫做 FreeBOT 的球形機器人系統,它們之間能夠通過磁性自由地連接在一起。
IROS 是機器人領域在全球范圍內規模最大的兩個頂級會議之一,這是中國內地高校近十年來第一次獲得 IROS 最佳論文獎項。
機器人機構設計最佳論文獎為今年新增獎項,梁冠琪所在的團隊因此成為首屆獲獎者。而除了這篇論文獲獎,林天麟團隊此次有三篇關于 MSRR 的論文都被 IROS 接收。另外兩篇論文的分別研究了系統中單個模塊的相對定位,以及作為整個系統的機器人快速重構算法。 連接不受限制的磁性球體機器人
MSRR 機器人與常見的機器人在形態上有很大的差別,在設計思路上也不同。人形機器人、四足機器人、或者無人機,這些機器人形態固定,在設計時會考慮從某些具體功能出發。
而 MSRR 機器人則是另外一種思路,不針對特定的任務而設計。科學家們希望它能夠隨著任務和環境的不同,迅速改變自身的構型,從而實現更廣泛的功能。這種思路受到了群居生物的啟發。群居動物組合在一起能夠完成遠超出個體能力的復雜任務。比如螞蟻,在遇到個體難以通過的地形時,能夠彼此銜接身體,組成橋梁等復雜結構。
圖|其它 MSRR 連接方式與 FreeBOTs 的比較(來源:論文)
因此, MSRR 機器人設計的一個核心問題是模塊間的連接機構。現有的MSRR系統的連接方式都存在某些約束,兩個模塊間需要精確地對準才能連接,并且存在特定的連接面,類似航天器的對接方式。
梁冠琪介紹,在思考 FreeBOT 的設計時,林教授希望能夠盡可能地減少對連接的限制,甚至做到能迅速及任意進行連接的效果。現實生活中的巴克球這種智力玩具也給了他們啟發。巴克球是一個帶磁性的小球,一大群巴克球能自由組合成各種各樣的形狀。
FreeBOT也是利用磁力與另一個FreeBOT表面上任意一點進行連接,擺脫了傳統MSRR需要在特定連接點進行連接的約束。 這一性能是如何實現的?FreeBOT 的結構主要分為兩部分:外部一個鐵磁性球殼,以及內部的驅動器。內部驅動器上有輪子、馬達、磁鐵等部件。
驅動器像一個小車帶著磁鐵在球殼內部運動,從而改變FreeBOT的重心分布及磁作用力的方向,一方面賦予FreeBOT獨立移動的能力,另一方面能讓FreeBOT通過磁力在另一個FreeBOT上自由走動。 如圖所示,當驅動器靠近兩個圓球的外在接觸點時,傳導到表面的磁性就能夠讓兩個FreeBOT連接在一起。連接或者斷開連接只需要0.5秒的時間。
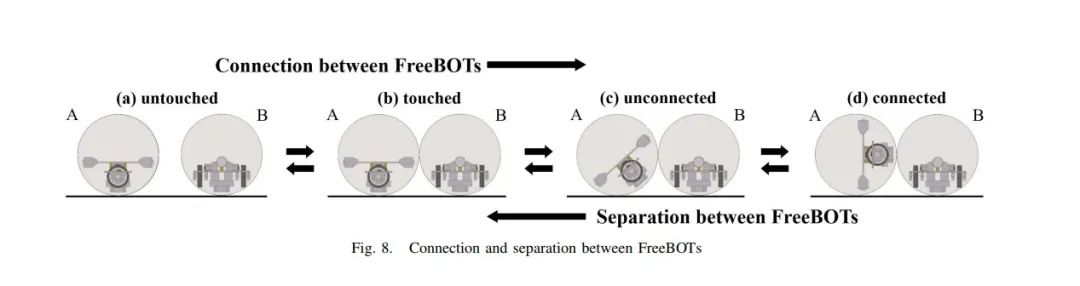
圖| FreeBOT 之間的分離和連接(來源:論文)
這樣,內部的驅動器,既實現了對單個 FreeBOT 運動的控制,同時也能夠控制球外部的磁性傳導。 憑借內部的強大磁體,單個的 FreeBOT 就可以爬上有磁性的斜坡甚至墻面。論文還展示了兩個 FreeBOT 合作完成一些超越個體能力的任務。
磁鐵在驅動器的底部,它就會對外殼始終保持磁力,讓靠近它的球殼表面具有磁性;同時,磁鐵與球殼的內面又非直接接觸,而是橡膠輪與球殼內面接觸,這樣可以通過控制橡膠輪,讓磁鐵在球殼內部旋轉方向。
要實現自由迅速的連接,磁鐵的選型以及其距離外部鐵殼的距離需要恰到好處,梁冠琪介紹,試驗中間經歷過很多次失敗。
磁性會隨著距離而衰減,因此要盡可能靠近球殼內壁,但是如果太近,也會出現問題。“太近的話,由于磁鐵的吸力很大,就直接把小車吸在了球殼上,并且會導致小車形變,就沒有辦法讓小車在球殼內自由運動。”梁冠琪回憶他在實驗中得到的經驗。
獲獎論文所展示的是第一代的版本,梁冠琪介紹,他們目前正在研究結構設計上的細節優化。
林天麟所指導的三篇關于多機器人系統的論文同時入選 IROS ,展現了團隊在這一方向上的探索。 林天麟教授是IEEE高級會員,師從中國工程院院士徐揚生教授。他在機器人和自動化系統的研發方面擁有豐富的成果,大部分論文均發表于機器人和自動化領域的頂級國際期刊及國際會議,如T-RO,JFR,T-MECH,ICRA和IROS等。除了模塊化機器人系統,軟體機器人、多機器人系統、人機協作都是團隊的研究方向。 他也是深圳市人工智能與機器人研究院(AIRS)的成員。這個研究院依托于香港中文大學(深圳),是深圳市政府設立的十大基礎研究機構之一。
此次入選 IROS 的另外兩篇論文,分別研究了系統中單個機器人的相對定位,以及作為整個系統的機器人快速重構算法。
系統中單個機器人的相對定位是指,系統中任意一部機器人實時確定出其他機器人相對于自身的位置和方位。這是一個由多個機器人組成的系統正常工作的前提。
整個系統的快速重構算法則是幫助一個機器人系統識別環境并且改變整體構型。比如多個 FreeBOT 組成的機器人系統,需要夠根據路面情況的不同,連續調整隊列,持續前進。
針對這個問題,一篇論文進行了算法設計。在仿真實驗中,一個 FreeBOT 系統能夠快速適應復雜的表面,通過“變換隊形”上臺階,翻越障礙物。
用MSRR進行非結構化環境探索
《超能陸戰隊》中,小宏設計的微磁機器人系統能夠組成一只巨大的手掌,并做出招手的姿勢。這樣一個動作看起來簡單,在設計上卻非常困難。“這要求最下面的模塊,能夠提供這樣一個自由度,這里面就有物理學上的瓶頸。”梁冠琪介紹。
這是長遠的目標。不過短期內,科學家們希望 MSRR 能夠幫助人類進行非結構的環境探索,尤其是地震、火災等環境中完成探索、越障、抓取等任務。如在災后的廢墟現場。現在也有一些探勘環境的機器人,比如蛇形機器人可以探索一些狹窄的縫隙,不過遇到斷橋或者高樓這樣的結構,運動依舊會受限,而一個 MSRR 機器人就能夠更靈活地適應各種地形。
假設災后現場有一個很小的隧道,而生還者在隧道的另一頭,這時候機械臂的功能無法施展開, MSRR 就可以用小模塊的方式通過隧道,到另一端再重新構型,并且實現機械臂的功能。
要實現這樣的功能,就需要比較大規模的系統。梁冠琪介紹,梁冠琪介紹,目前FreeBOT只是驗證了一種能實現迅速并任意連接的機構設計。 而未來,團隊希望能夠在機器人上部署傳感器及控制器,使其成為分布式的自主系統。此外,當更多的FreeBOT構成一個系統的時候,就需要定位和運動規劃的算法指導其移動。更大的系統也對傳感器部署、增強FreeBOT的機械性能、更長時間的續航提出了更高的要求。 FreeBOT 是梁冠琪科研道路上的第一個作品,他告訴 DeepTech ,在導師手把手的指導下,他開始慢慢領悟如何去設計機器人。“我從老師身上學到一點,是觀察身邊會動的東西,然后去思考聯系。”
他會去留意身邊各種會動的東西,觀察他們是為什么能動,比如商場里常見的鼓風機充氣玩偶,會受到氣流的影響一直搖擺,也有設計成機器人的潛力。“新穎機器人的設計,無非是通過一些新穎的結構和方法為機器人提供自由度。而這些自由度是怎么來的,大自然和日常生活往往會告訴我們一些有趣的答案。”
原文標題:《超能陸戰隊》磁性球體機器人成真?中國內地高校近十年來首獲機器人頂會IROS最佳論文獎
文章出處:【微信公眾號:DeepTech深科技】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
驅動器
+關注
關注
54文章
8688瀏覽量
149847 -
機器人
+關注
關注
213文章
29715瀏覽量
212731
原文標題:《超能陸戰隊》磁性球體機器人成真?中國內地高校近十年來首獲機器人頂會IROS最佳論文獎
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
機器人測試:從虛擬到現實,機器人如何才能變成真正的打工牛馬?







 工商網監
工商網監
評論