") 利用PLC調(diào)用ABB機(jī)器人程序號(hào)教程
利用PLC調(diào)用ABB機(jī)器人程序號(hào)教程

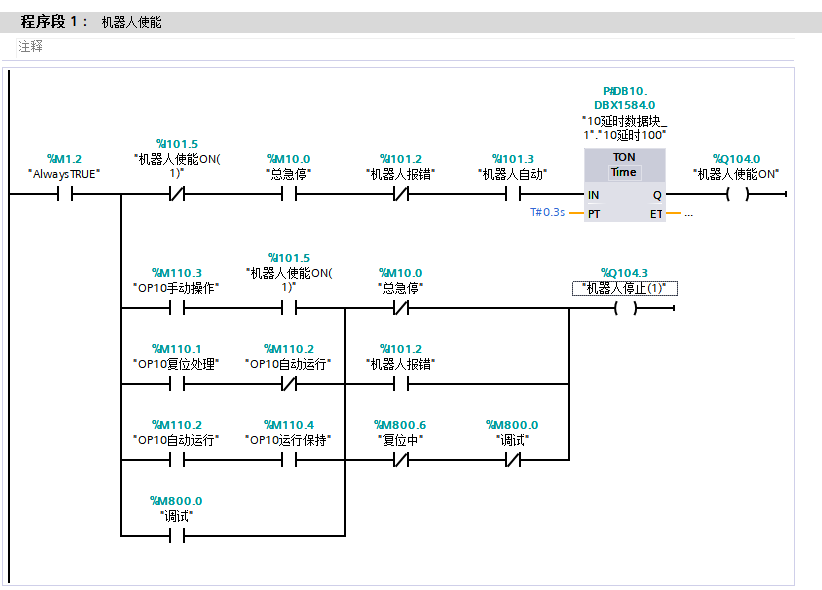
機(jī)器人使能控制程序。
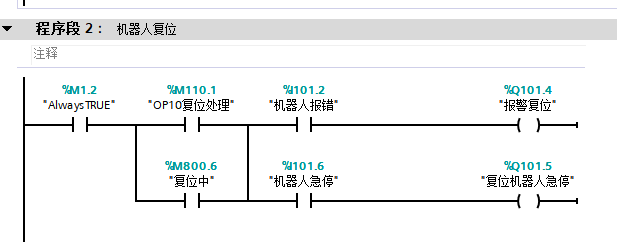
復(fù)位程序用來(lái)復(fù)位報(bào)錯(cuò)與急停
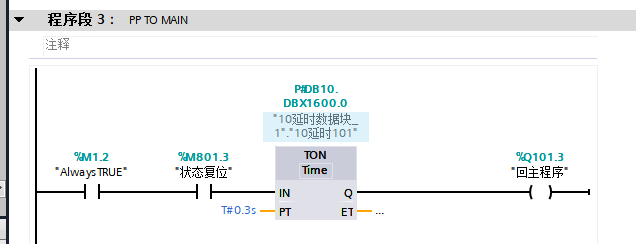
PP TO MAIN 程序是用來(lái)使機(jī)器人里的程序回到 MAIN 主程序的。
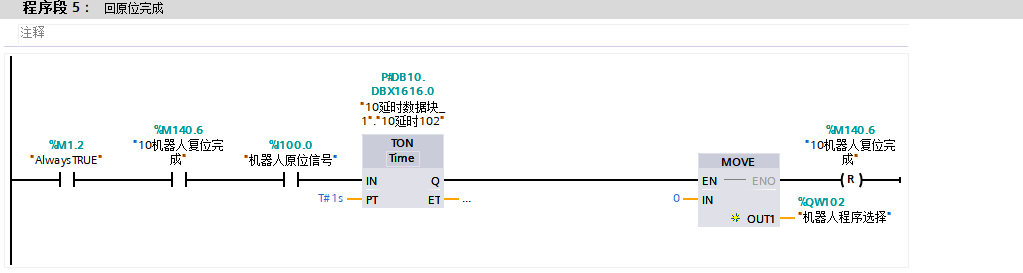
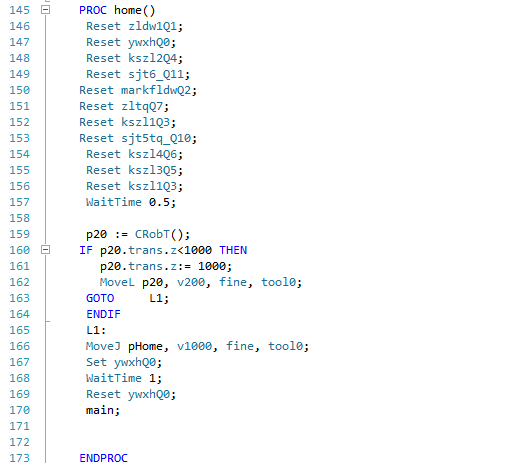
機(jī)器人回原位程序是在機(jī)器人程序中編寫(xiě)了一個(gè)回原位的程序,并定義為 5,這段程序意思是調(diào)用 5 程序。
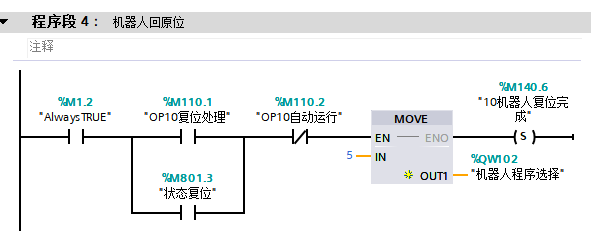
回原位程序是 5 程序執(zhí)行完后使程序調(diào)用清零。
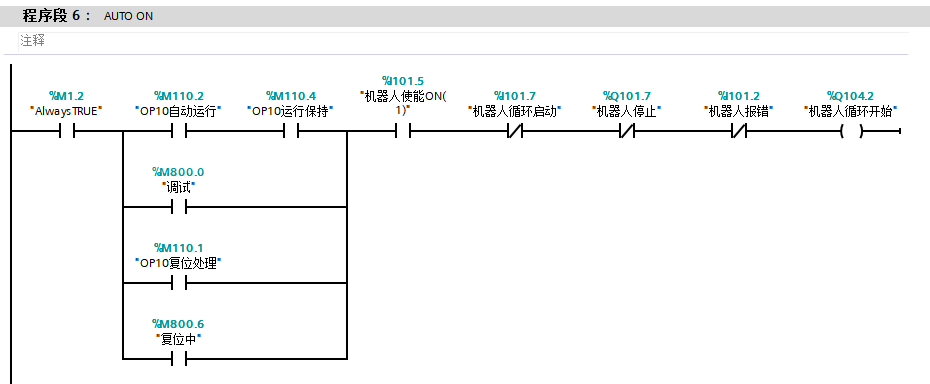
AUTO ON程序是使機(jī)器人在自動(dòng)情況下保持機(jī)器人內(nèi)部程序循環(huán)運(yùn)行的程序。
| ABB機(jī)器人部分程序 |
| 程序可以在示教器里編輯也可以在 RobotStudio 軟件里進(jìn)行編輯。需要用到MOVE L、 MOVE J、 SET、 RES、 WAIT、 IF 、 TEST 等等指令,需要設(shè)定好位置點(diǎn)位與 I/O 點(diǎn)位,方便編輯時(shí)使用。 |
(1)示教器:
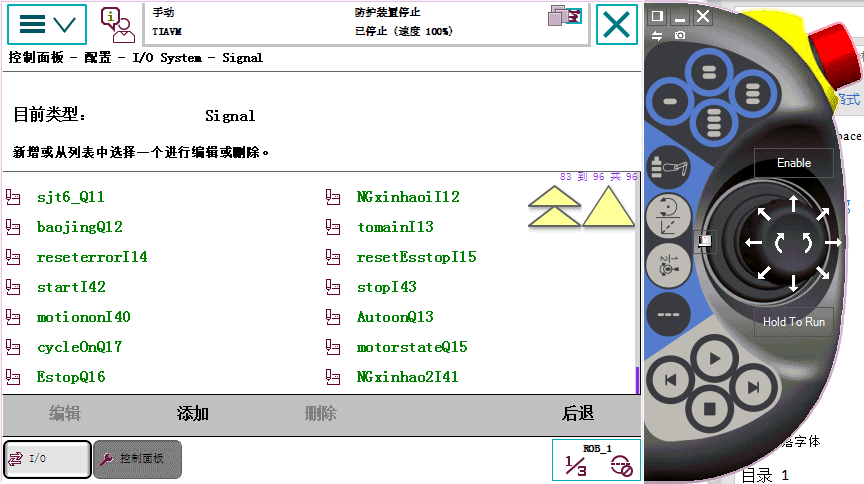
以下三張圖片為配置好的 I/O 信號(hào)點(diǎn)
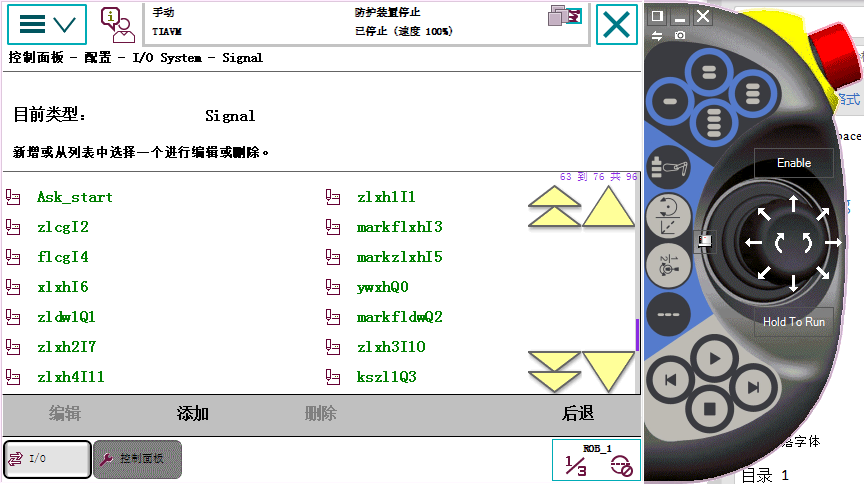
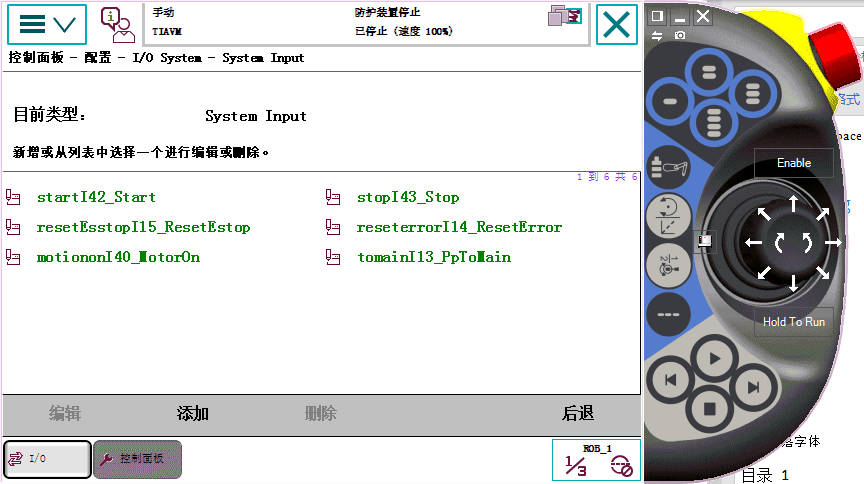
下圖為配置的系統(tǒng)的輸入點(diǎn)
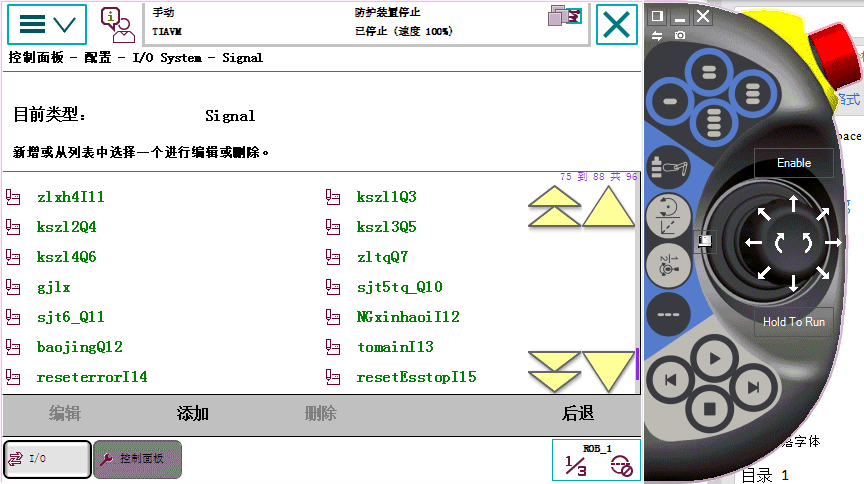
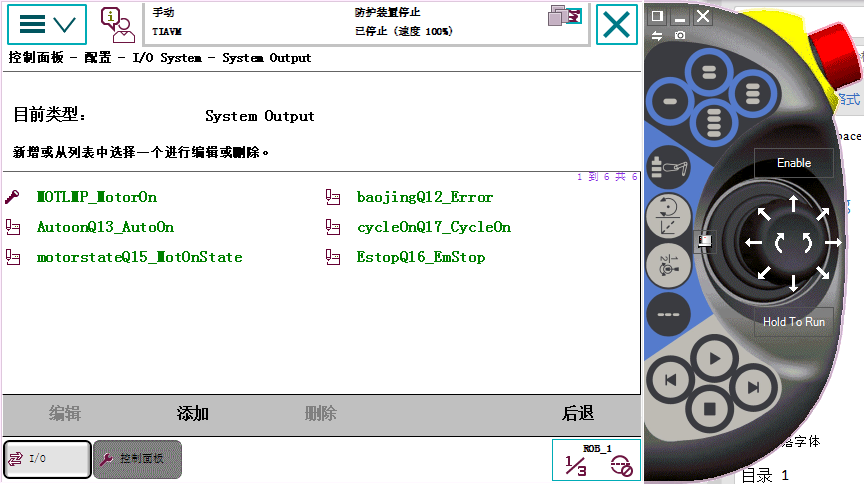
下圖為配置的系統(tǒng)的輸出點(diǎn)
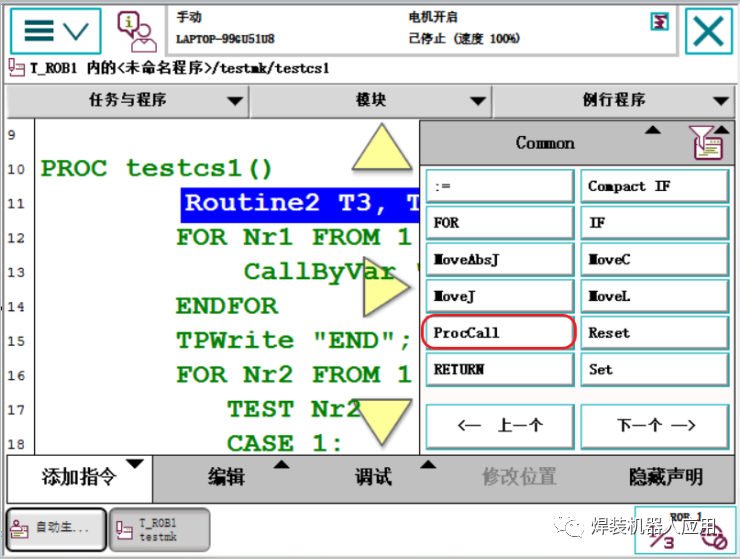
在添加指令界面可添加需要用到的指令。
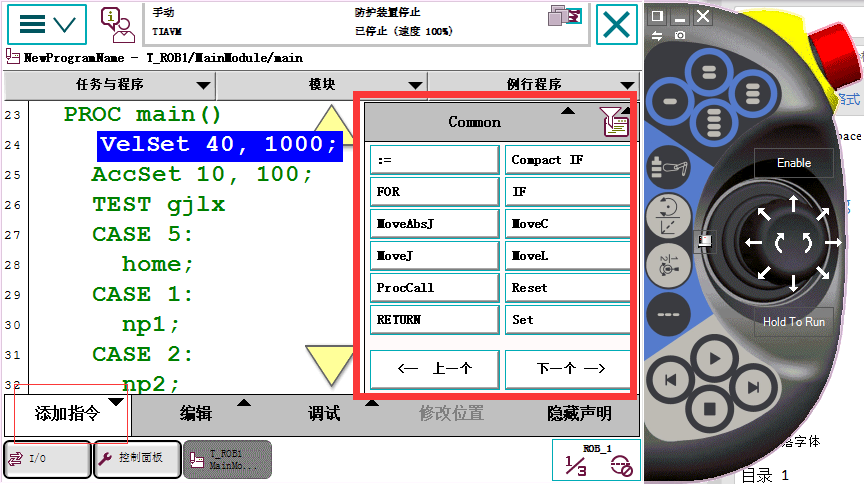
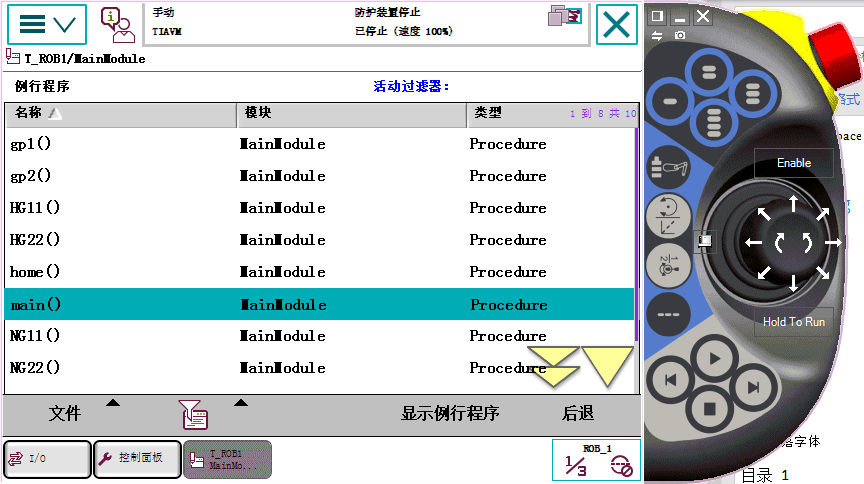
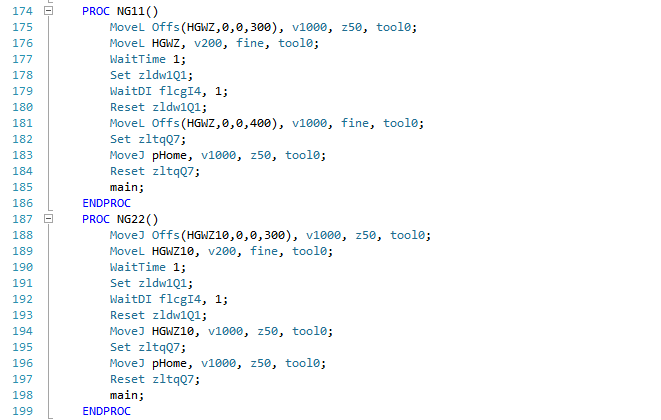
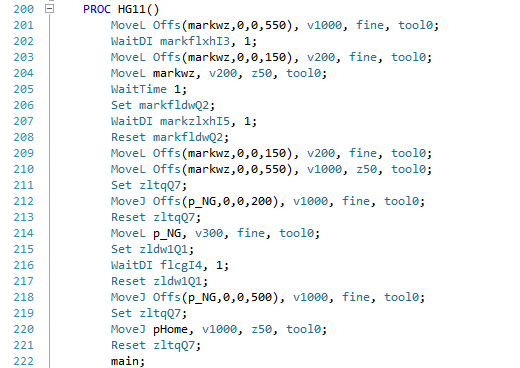
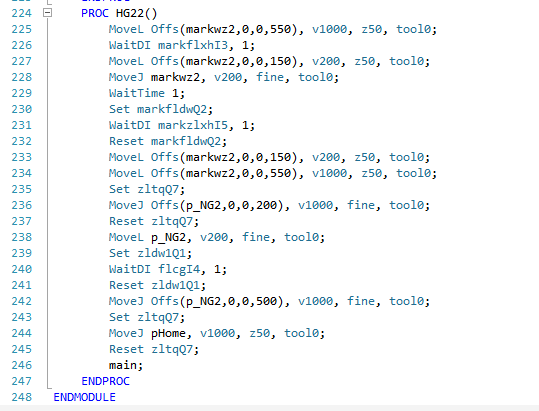
這是添加了 7 個(gè)子程序,都用 MAIN 主程序來(lái)調(diào)用。
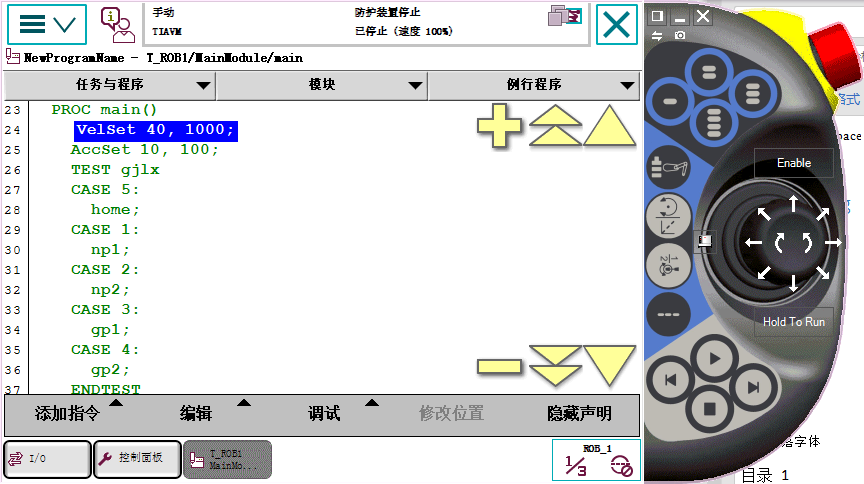
下圖的意思是當(dāng) gjlx 這個(gè)點(diǎn)的值等于以下相對(duì)的數(shù)時(shí),調(diào)用相對(duì)應(yīng)的程序。
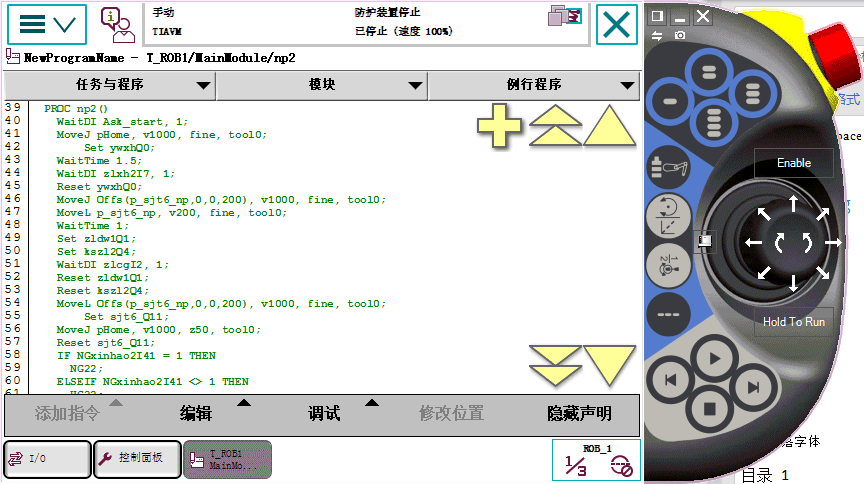
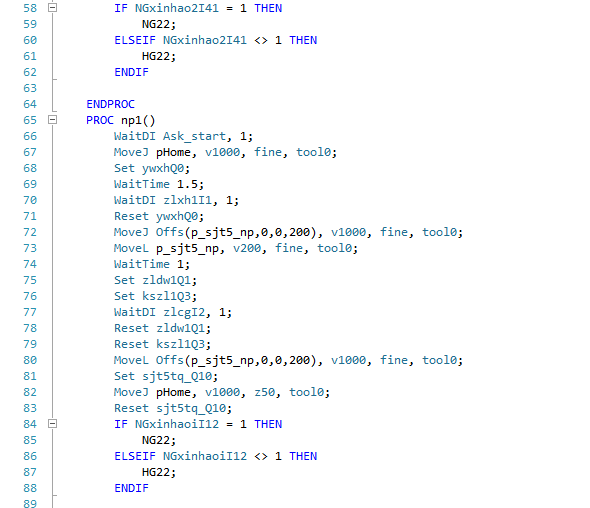
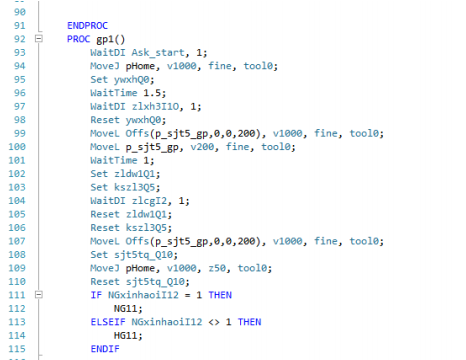
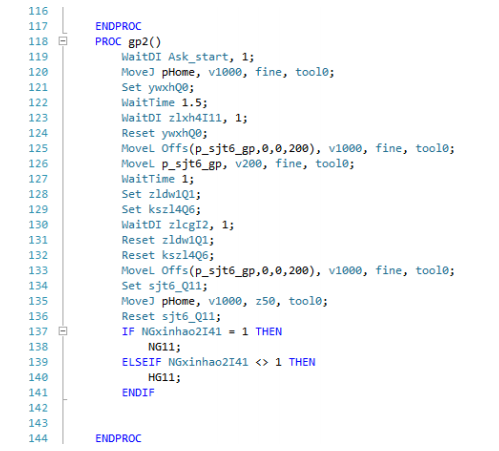
下圖是一段動(dòng)作程序,主要是等待開(kāi)始信號(hào),然后移動(dòng)到原點(diǎn)后給原位信號(hào)后繼續(xù)移動(dòng)到(P_sjt6_np)的位置后進(jìn)行置位復(fù)位,然后接收到下步信號(hào)后在進(jìn)行動(dòng)作,最后判定如果 NGxinhaoI41 的值等于 1 就跳轉(zhuǎn)到 NG22 程序,如果不等于就跳轉(zhuǎn)到 HG22 程序。
以上是在示教器里編輯的例子。
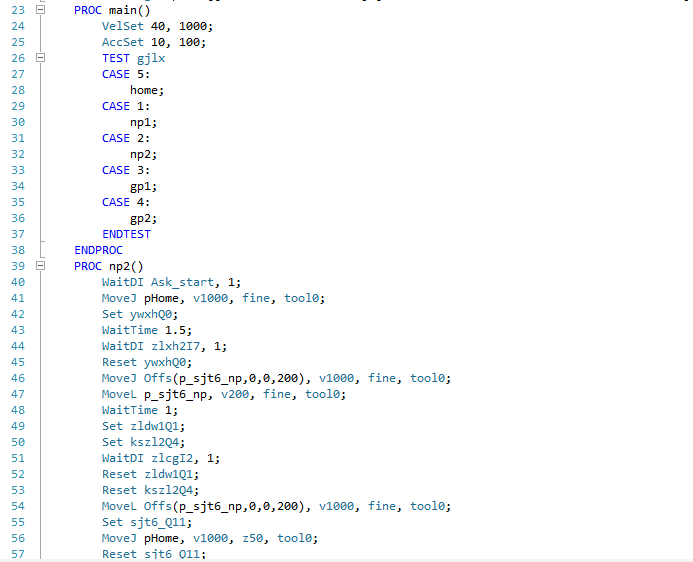
(2) RobotStudio:
以下是用 RobotStudio 進(jìn)行編輯的程序,和示教器編輯基本一樣都是用指令進(jìn)行編寫(xiě),只要寫(xiě)出指令的前幾位就可以有完整的指令進(jìn)行選擇。 示教器可以編輯細(xì)節(jié)部分的程序,電腦軟件可以編輯邏輯框架。
這部分 PLC 部分的機(jī)器人程序?qū)Υ蟛糠謾C(jī)器人調(diào)試都適用,屬于通用型的程序。機(jī)器人部分的程序需要根據(jù)現(xiàn)場(chǎng)需求進(jìn)行編輯,不過(guò) I/O 點(diǎn)配置及設(shè)置是通用的。 在控制機(jī)器人的時(shí)候要注意有沒(méi)有干涉的位置,如果有就要注意。在編程的時(shí)候可以編輯一部分,走一步試試要注意邏輯通順就可以了。
來(lái)源:機(jī)器人及PLC自動(dòng)化應(yīng)用
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29718瀏覽量
212774 -
plc
+關(guān)注
關(guān)注
5036文章
13903瀏覽量
474362 -
程序
+關(guān)注
關(guān)注
117文章
3826瀏覽量
82953 -
ABB
+關(guān)注
關(guān)注
26文章
562瀏覽量
54265
原文標(biāo)題:PLC調(diào)用ABB機(jī)器人程序號(hào)
文章出處:【微信號(hào):gkongbbs,微信公眾號(hào):工控論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
ABB IRB5400-噴涂工業(yè)機(jī)器人
ABB焊接機(jī)器人問(wèn)題
ABB機(jī)器人指令模塊介紹與開(kāi)發(fā)過(guò)程
ABB機(jī)器人維修保養(yǎng)指南
ABB機(jī)器人實(shí)訓(xùn)平臺(tái)實(shí)驗(yàn)
基于ABB機(jī)器人的應(yīng)用協(xié)議RAP

機(jī)器人螺柱焊程序號(hào)選不上怎么怎么解決?
ABB機(jī)器人線速度_青島ABB機(jī)器人發(fā)生電源故障維修

ABB機(jī)器人程序和功能的應(yīng)用
ABB機(jī)器人程序結(jié)構(gòu)總結(jié)
分享一下ABB機(jī)器人調(diào)用例行程序的方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論