") KUKA機器人的”Dry run空轉(zhuǎn)”概念
KUKA機器人的”Dry run空轉(zhuǎn)”概念
KUKA機器人的”Dry run空轉(zhuǎn)”概念.
空轉(zhuǎn)如果自動運行中程序運行中斷,并且機器人離開程序編定的軌道,則將進(jìn)行空轉(zhuǎn)。
如果在子程序中導(dǎo)致空轉(zhuǎn),則只在該子程序中執(zhí)行空轉(zhuǎn)運行。空轉(zhuǎn)運行并不涉及調(diào)用該子程序的那個程序。
可能發(fā)生下列情況:
1.語句選擇
2.取消程序
3.反向運行
4.因非軌道停機、停機制動器損壞或由用戶手動移動而離開軌道。
在這些情況下,控制器將數(shù)字、二進(jìn)制和模擬的輸出端、存儲器和旗標(biāo)均置為 FALSE。此后機器人移至軌道上下一個程序編定的位置。到達(dá)該位置時將進(jìn)行空轉(zhuǎn)。之前重置的信號將被相應(yīng)賦值,就好象程序結(jié)束運行時已到達(dá)此位置。程序運行可繼續(xù)進(jìn)行。
如果在一次空轉(zhuǎn)之后將繼續(xù)進(jìn)行程序運行,則控制器的運行情況可能會與程序編定的不同。
請注意下列空轉(zhuǎn)運行和程序運行之間的區(qū)別:
1.空轉(zhuǎn)過程中只可訪問輸入端的當(dāng)前狀態(tài)。而該輸入端在程序運行中可能有另外的數(shù)值。
2.系統(tǒng)輸出端和那些由輸入端決定而被賦值的輸出端將不被考慮。
3.程序循環(huán)、跳轉(zhuǎn)和等待語句以及子程序調(diào)用將不被考慮。
4.計數(shù)操作和定時器將不被考慮。
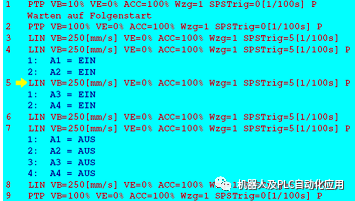
例如程序運行會由于行 5 處的語句選擇而在行 6 處被中斷。在行 6 處輸出端 A1... A4 為 TRUE。這些輸出端現(xiàn)在被置為 FALSE。隨著 SAK 移動將緩慢地直接駛至所選擇的運動語句。到達(dá)行 5 時機器人將停止,并執(zhí)行空轉(zhuǎn),且輸出端 A1 和 A2 將重新被置為 TRUE。程序運行可繼續(xù)進(jìn)行。
取消程序
當(dāng)取消程序時,則所有輸出端、標(biāo)記器和旗標(biāo)均將被置為 FALSE。
反向運行
點擊啟動反向運行鍵,所有輸出端、標(biāo)記器和旗標(biāo)均被賦值為 FALSE。將按程序編定的軌道反向運行。此時將不考慮邏輯指令及子程序調(diào)用。如果通過按下啟動正向運行鍵重新改變方向,則將執(zhí)行空轉(zhuǎn)運行。
離開軌道
離開軌道時,將只有數(shù)字和模擬輸出端被重置。二進(jìn)制輸出端、標(biāo)記器和旗標(biāo)的狀態(tài)均不更改。通過啟動鍵可將機器人重置回它離開軌道的位置處。空轉(zhuǎn)之后數(shù)字和模擬輸出端將被置為離開軌道之前的狀態(tài)。
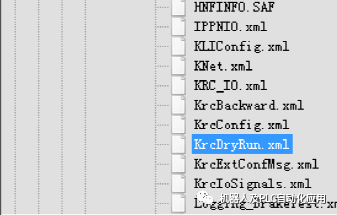
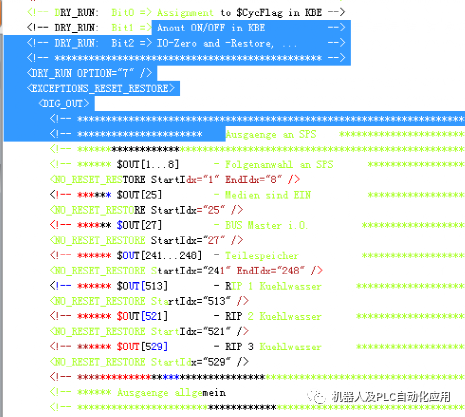
在執(zhí)行空運行時用來保持常量的文件”KrcDryRun.xml”.
責(zé)任編輯:xj
原文標(biāo)題:KUKA C4空轉(zhuǎn) KrcDryRun.
文章出處:【微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
機器人
+關(guān)注
關(guān)注
213文章
29445瀏覽量
211399 -
KUKA
+關(guān)注
關(guān)注
3文章
218瀏覽量
16875
原文標(biāo)題:KUKA C4空轉(zhuǎn) KrcDryRun.
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
盤點#機器人開發(fā)平臺
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
海康機器人布局關(guān)節(jié)機器人業(yè)務(wù)
庫卡KUKA機器人常見故障維修
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
Al大模型機器人
工業(yè)機器人仿真軟件有哪些
Kuka機器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論