") 基于SPARC微處理器ERC32實(shí)現(xiàn)板級(jí)支持包BSP的開發(fā)
基于SPARC微處理器ERC32實(shí)現(xiàn)板級(jí)支持包BSP的開發(fā)
一個(gè)優(yōu)秀的RTOS(Real-Time Operating system)不但要擁有一個(gè)高可靠、多任務(wù)的實(shí)時(shí)內(nèi)核,還應(yīng)具有可剪裁和可移植的能力。RTEMS(the Real - Time Executivefor Multiprocessor Systems)就是這樣的系統(tǒng),它提供的環(huán)境可以滿足高性能的嵌入式多任務(wù)實(shí)時(shí)應(yīng)用。目前,RTEMS支持的CPU系列有:A29k、ARM、H8300、1386、1960、M68k、MIPS、PPC和SPARC等。
板級(jí)支持包BSP(Board Support Package)是嵌入式實(shí)時(shí)系統(tǒng)的基礎(chǔ)部分,也是實(shí)現(xiàn)系統(tǒng)可移植性的關(guān)鍵。它負(fù)責(zé)上電時(shí)的硬件初始化、啟動(dòng)嵌入式操作系統(tǒng)或應(yīng)用程序模塊、提供底層硬件驅(qū)動(dòng),為上層軟件提供訪問底層硬件的手段。BSP針對(duì)目標(biāo)板設(shè)計(jì),其結(jié)構(gòu)和功能隨目標(biāo)板的不同而呈現(xiàn)較大的差異。在將嵌入式系統(tǒng)移植到一種新的CPU時(shí),必須提供相應(yīng)的板級(jí)支持包。
本文參考SPARC微處理器ERC32的BSP,主要討論RTEMS的BSP開發(fā)過程。
1 RTEMS體系結(jié)構(gòu)
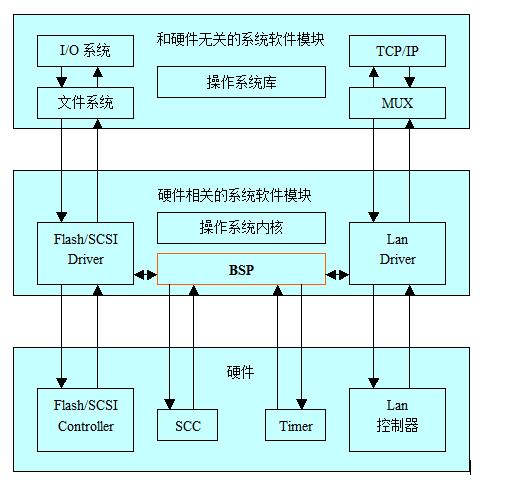
RTEMS采用微內(nèi)核基礎(chǔ)上的層次化結(jié)構(gòu),如圖l所示。這種結(jié)構(gòu)只把那些絕對(duì)必需的系統(tǒng)功能置于內(nèi)核之中(如中斷管理、上下文切換、內(nèi)存訪問管理、時(shí)間管理、線程及線程間的通信與同步管理等),而把那些并非必需的系統(tǒng)功能(如文件系統(tǒng)、網(wǎng)絡(luò)、遠(yuǎn)程過程調(diào)用等)置于微內(nèi)核之上在用戶模式下運(yùn)行。
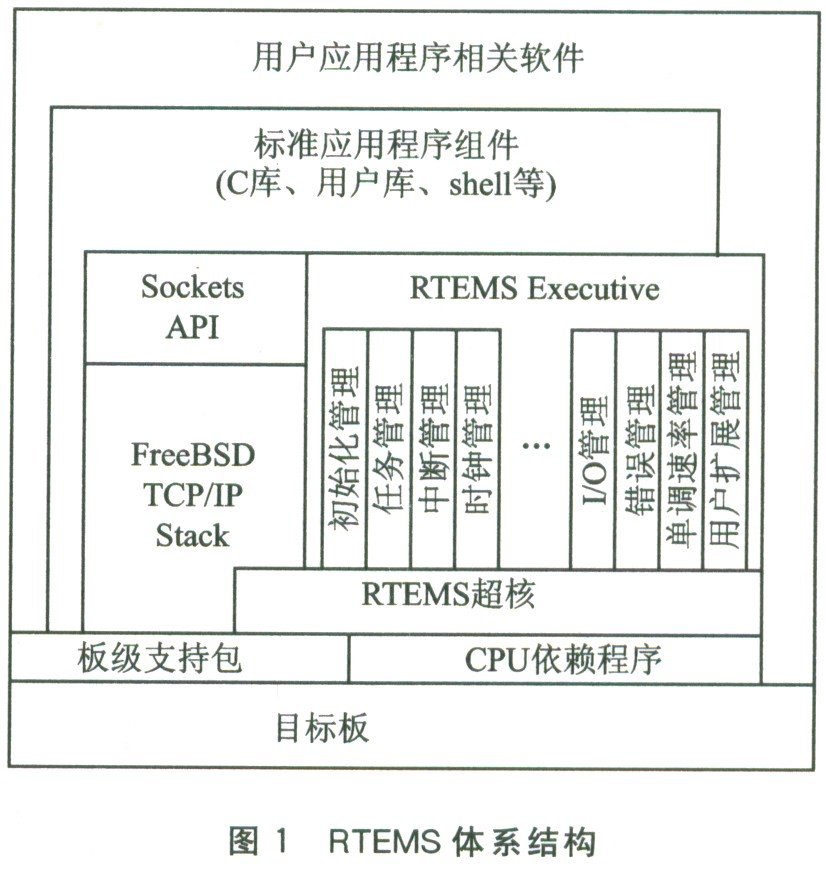
RTEMS的板級(jí)支持包是啟動(dòng)代碼、連接器腳本和編譯規(guī)范文件(specs)和設(shè)備驅(qū)動(dòng)程序的集合,它們針對(duì)不同目標(biāo)機(jī)的硬件環(huán)境剪裁RTEMS。
2 RTEMS啟動(dòng)過程
處理器加電或復(fù)位時(shí),基于RTEMS的應(yīng)用程序初始化或者重新初始化。BSP中的啟動(dòng)代碼負(fù)責(zé)為RTEMS應(yīng)用程序建立運(yùn)行環(huán)境。
RTEMS啟動(dòng)過程的順序如下:
① 執(zhí)行BSP中的啟動(dòng)代碼;
② 調(diào)用rtems_initialize_executive;
③ 局部和全局應(yīng)用程序的初始化。
處理器復(fù)位時(shí),首先執(zhí)行BSP的啟動(dòng)代碼。BSP必須將所有的硬件初始化為一個(gè)靜止?fàn)顟B(tài),然后操作系統(tǒng)才能初始化。rtems_initialize_executive指令不返回啟動(dòng)代碼,它將導(dǎo)致最高優(yōu)先級(jí)的初始化任務(wù)開始執(zhí)行。初始化任務(wù)用于完成局部或全局依賴于RTEMS的應(yīng)用程序初始化。
3 BSP開發(fā)過程
下面以SPARC微處理器ERC32為例,說明RTEMSBSP的開發(fā)步驟:
①建立開發(fā)環(huán)境。開發(fā)模式采用宿主機(jī)/目標(biāo)機(jī)模式。宿主機(jī)運(yùn)行環(huán)境采用Linux系統(tǒng),目標(biāo)機(jī)為ERC32。宿主機(jī)和目標(biāo)機(jī)通過串口連接。交叉開發(fā)工具采用添加了RTEMS補(bǔ)丁的GNU工具鏈(GCC,GDB,Newlib,binary utilities)。
② 選擇BSP模板。通常是根據(jù)操作系統(tǒng)提供的BSP模板,選擇與應(yīng)用硬件環(huán)境最為相似的參考設(shè)計(jì),針對(duì)具體的目標(biāo)機(jī)對(duì)參考BSP進(jìn)行必要的修改和增刪,以形成自己的BSP。選擇一個(gè)適當(dāng)?shù)腂SP模板可以達(dá)到事半功倍的效果。
③建立新bsp目錄。將模板BSP整個(gè)目錄拷貝到適當(dāng)?shù)哪夸浵拢ㄈ鏻ibbsp/),重命名為mybsp。
④ 建立bsp配置文件。拷貝任意一個(gè)BSP.cfg,重命名為mybsp.cfg,修改相關(guān)的體系結(jié)構(gòu)定義,如:RTEMS_CPU_MODEL,RTEMS_BSP,CPU_CFLAGS和制定make_exe規(guī)則。
⑤修改makefile文件。對(duì)mybsp-bsp中每一個(gè)Makefile.in文件,運(yùn)行acpolish,并檢查運(yùn)行的結(jié)果,例如:
cd /mybsp - bsp/some_subdir
/path_to_SACOS/t00ls/update/acpolishMakefile.new
再次運(yùn)行acpolish:
/path_to_SACOS/tools/update/acpolishMakefile.in
將Makefile.new和Makefile.in進(jìn)行比較。如果不相同,則重新編輯Makefile.new,多次運(yùn)行acpolish,直到連續(xù)兩次產(chǎn)生的Makefile.in相同。
⑥ 修改啟動(dòng)代碼。建立自陷表、基本的CPU初始化、設(shè)置中斷堆棧等。
⑦ 配置RTEMS。設(shè)置RTEMS相關(guān)全局變量和常量、RTEMS配置表、CPU依賴信息表、系統(tǒng)初始化任務(wù)表,以及用戶初始化任務(wù)表等,除完成相關(guān)的系統(tǒng)功能之外,提供板上外設(shè)的設(shè)備驅(qū)動(dòng)程序。
⑧調(diào)試和測(cè)試。建立RTEMS執(zhí)行映像,利用串口下載可執(zhí)行映像到目標(biāo)機(jī),測(cè)試BSP的正確性。
3.1 啟動(dòng)代碼實(shí)現(xiàn)
BSP的啟動(dòng)代碼主要包含在五個(gè)文件中。它們是Start.s、boardinit.S、bootcard.c、bspstart.C和main.C。
Start.s包含了用于硬件初始化的匯編語言代碼,它是RTEMS的引導(dǎo)ROM入口。入口點(diǎn)SYM(start)是目標(biāo)機(jī)上電后執(zhí)行的第一段程序。SYM(start)的工作是完成將控制轉(zhuǎn)移到C程序boot_card()所需要的最少的設(shè)置,如初始化堆棧和禁止外部中斷等。它的具體操作包括:
①定義自陷表。這個(gè)自陷表是SPARC V7體系共有的,可從參考BSP中復(fù)制。
②初始化處理器。
a)初始化自陷基地址寄存器TBR,即將自陷表地址寫入TBR;
b)初始化處理器狀態(tài)寄存器PSR,設(shè)置系統(tǒng)為最高優(yōu)先級(jí)運(yùn)行模式,禁止所有可屏蔽中斷;
c)設(shè)置窗口無效寄存器WIM;
d)初始化堆棧,設(shè)置堆棧指針。
③調(diào)用SYM(_bsp_board_init)(在boardinit.S中定義,這些代碼是目標(biāo)板專用的),初始化MEC系統(tǒng)寄存器,初始化定時(shí)器。
④將已初始化數(shù)據(jù)從ROM拷貝到RAM,未初始化內(nèi)存清零。
⑤初始化環(huán)境變量和參數(shù),調(diào)用C程序boot_card()。
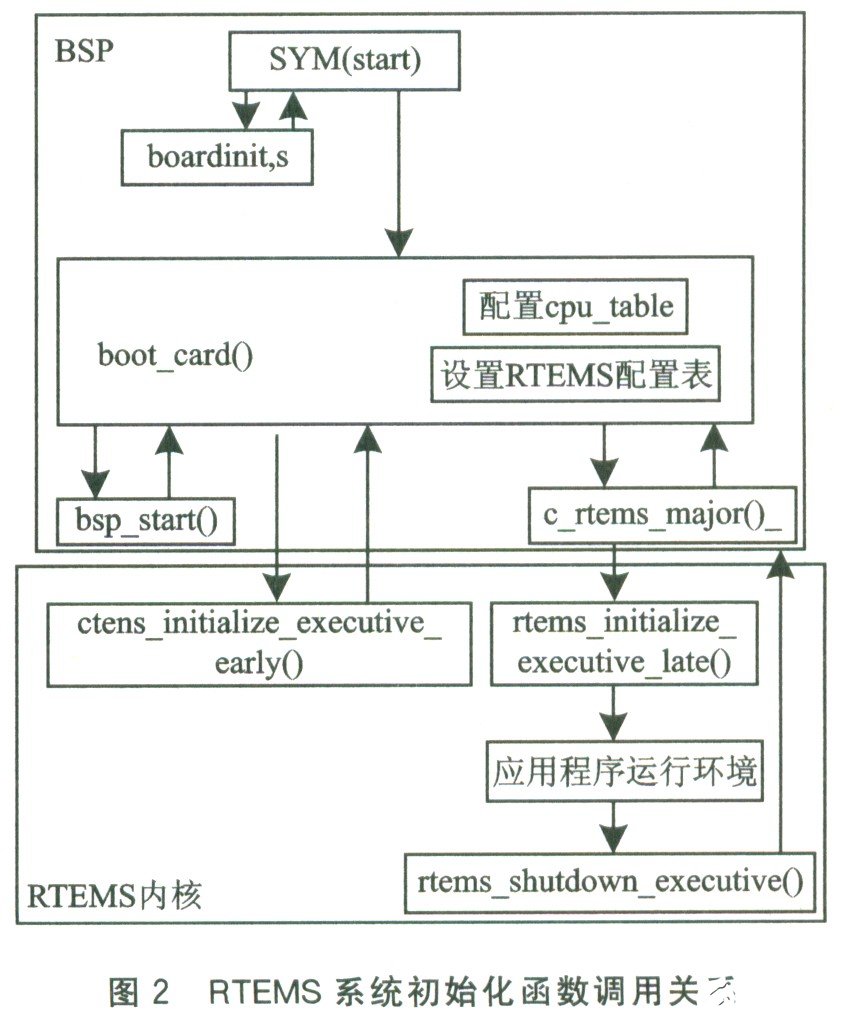
boot_card()完成RTEMS的基本配置,如設(shè)置RTEMS配置表、CPU依賴信息表的相關(guān)入口等。它調(diào)用bsp_start()完成目標(biāo)板特定的系統(tǒng)配置,調(diào)用內(nèi)核初始化函數(shù)完成RTEMS系統(tǒng)的初始化。boot_card()的具體操作包括:
①定義和聲明RTEMS全局變量。
extern rtems_configuration_table Configuration;
extern rtems_.configuration_.table BSP_Configuration;
extern rtems_cpu_table Cpu_table;
rtems_api_configuration_table BSP_RTEMS_Configura-tion;
rtems_interrupt_level bsp_isr_level;
②初始化CPU依賴信息表的所有人口為缺省值,除了下列兩項(xiàng),其余都為NULL。
Cpu_table.do_zero_of_workspace =TRUE;
Cpu_table.interrupt_stack_size =RTEMS_MINIMUM_STACK_SIZE;
③ 調(diào)用bsp_start(),根據(jù)目標(biāo)機(jī)環(huán)境重新配置RTEMS,為系統(tǒng)初始化任務(wù)建立標(biāo)準(zhǔn)C支持環(huán)境。
④ 調(diào)用內(nèi)核初始化函數(shù)rtems_initialize_executive_ early(),初始化RTEMS和設(shè)備驅(qū)動(dòng)程序。
⑤調(diào)用c_rtems_main(),創(chuàng)建并啟動(dòng)多任務(wù),運(yùn)行用戶應(yīng)用程序,直到調(diào)用rtems_shutdown_executive()退出RTEMS,才將控制返回BSP。
bsp_start()根據(jù)目標(biāo)機(jī)環(huán)境重新配置RTEMS,為調(diào)用操作系統(tǒng)初始化函數(shù)準(zhǔn)備一個(gè)合適的軟硬件環(huán)境。它的具體操作是:
①定義RTEMS全局變量。
unsigned char*work_space_start;
rtems_configuration_table BSP_Configuration;
rtems_cpu_table Cpu_table;
②修改CPU依賴信息表,為RTEMS系統(tǒng)初始化任務(wù)建立支持環(huán)境。
/*在執(zhí)行系統(tǒng)初始化任務(wù)之前,設(shè)置存堆的開始地址和大小,建立C支持庫*/
Cpu_table.pretasking_hook=bsp_pretasking_hook;
/*在驅(qū)動(dòng)程序初始化之后注冊(cè)設(shè)備名,打開標(biāo)準(zhǔn)輸人、標(biāo)準(zhǔn)輸出和標(biāo)準(zhǔn)錯(cuò)誤文件*/
Cpu_table.postdriver_hook=bsp_postdriver_hook;
Cpu_table.do_zero_of_workspace=TRUE;
/*設(shè)置中斷堆棧的大小(16*1024)*/
Cpu_table.interrupt_stack_size=ONFIGURE_INTER-RUPT_STACK_MEMORY;
③檢查并設(shè)置工作區(qū)起始地址。
BSP_Configuration.work_space_start=work_space_start;
④設(shè)置時(shí)鐘嘀嗒頻率。
CPU_SPARC_CLICKS_PER_TICK=BSP_Configuration.microseconds_per_tick;
⑤結(jié)束返回boot_card()。
圖2描述了RTEMS系統(tǒng)初始化函數(shù)之間的調(diào)用關(guān)系。
3.2設(shè)備驅(qū)動(dòng)程序?qū)崿F(xiàn)
設(shè)備驅(qū)動(dòng)程序的工作方式有輪詢和中斷兩種。無論采用哪一種方式,設(shè)備驅(qū)動(dòng)程序的基本流程都是相同的。下面以時(shí)鐘設(shè)備驅(qū)動(dòng)程序?yàn)槔?jiǎn)單說明編寫RTEMS設(shè)備驅(qū)動(dòng)程序的基本框架。
①聲明和定義常量和全局變量。
/*關(guān)于時(shí)鐘設(shè)備的常量參數(shù)*/
volatile rtems_unsigned32 Clock_driver_ticks;
extern int CLOCK_SPEED;
extern rtems_unsigned32 CPU_SPARC_CLICKS_PER_TICK;
/*定義時(shí)鐘驅(qū)動(dòng)程序入口數(shù)據(jù)結(jié)構(gòu)并初始化*/
#define CLOCK_DRIVER_TABLE_ENTRY{Clock_initialize,NULL,NULL,NULL,NULL,Clock_contr01}
②獲取接口參數(shù)。
rtems_device_major_number\
rtems_clock_major=~O;
rtems_device_minor_number \
rtems_clock_minor
③提供接口函數(shù)。
/*時(shí)鐘驅(qū)動(dòng)程序初始化入口*/
rtems_device_driver Clock_initialize() {
/*安裝時(shí)鐘中斷向量,設(shè)置時(shí)鐘計(jì)數(shù)器和標(biāo)度器的預(yù)設(shè)值;保存時(shí)鐘設(shè)備接口參數(shù),以備系統(tǒng)使用*/ };
/*時(shí)鐘滴答中斷處理程序*/
rtems_isr Clock_isr() {
/*時(shí)鐘設(shè)備的計(jì)數(shù)器和標(biāo)度器設(shè)值為周期運(yùn)行模式*/ };
/*時(shí)鐘設(shè)備控制入口*/
nems—deviceLdriver Clock_control()
{
//設(shè)置時(shí)鐘滴答中斷處理方式
};
/*關(guān)閉時(shí)鐘設(shè)備*/
void Clock_exit()
{
//屏蔽時(shí)鐘滴答,停止時(shí)鐘計(jì)數(shù)
};
④啟動(dòng)時(shí)鐘設(shè)備。
3.3 修改鏈接器命令腳本
鏈接器命令腳本為鏈接器提供鏈接的規(guī)則,對(duì)鏈接過程進(jìn)行顯式地控制.修改鏈接器腳本,配置系統(tǒng)可用內(nèi)存區(qū)域和定義可執(zhí)行映像各個(gè)程序段在內(nèi)存中的位置,如加載程序時(shí)代碼段(.text)從RAM地址。開始放置.
/*缺省值,可以修改*/
_PR()M_SIZE=2M;
_RAM_SIZE=4M;
_RAM_START_0x02000000;
_PROM-START=0x00000000;
/*最終可執(zhí)行程序段的內(nèi)存位置*/
SECTI()NS
{ .txt :
{ text_start=。;
*(.text)
.=ALIGN(16);
}》RAM
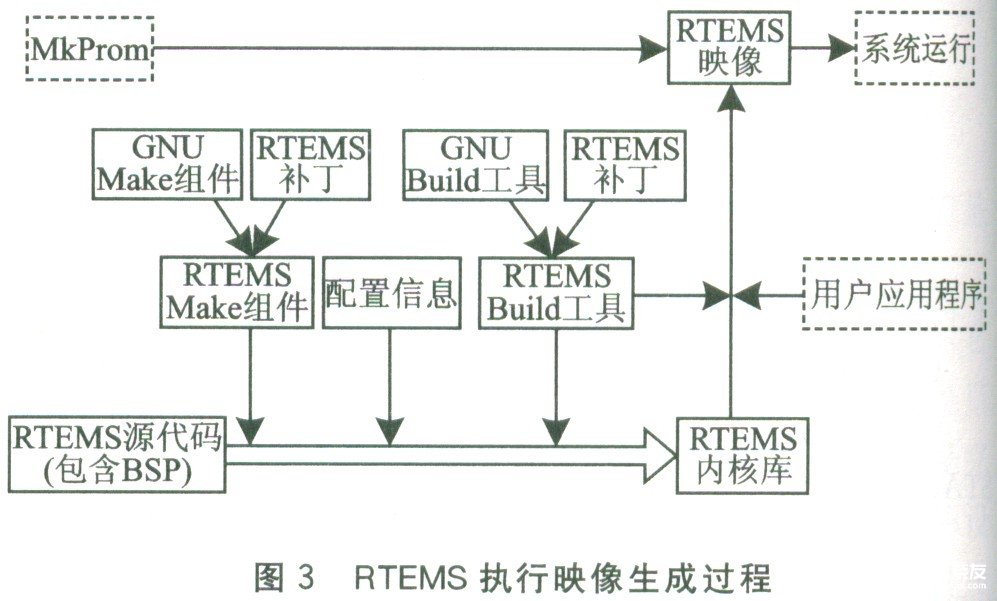
4 建立RTEMS可執(zhí)行映像
BSP開發(fā)完成之后,與RTEMS的其他代碼,如CPU依賴層、超核、API以及標(biāo)準(zhǔn)應(yīng)用程序模塊等,經(jīng)由交叉編譯工具編譯連接之后,生成可以加載到目標(biāo)機(jī)的RTEMS執(zhí)行映像,如圖3所示。
結(jié) 語
BSP的開發(fā)對(duì)于嵌入式系統(tǒng)的移植具有重要意義.本文以SPARC體系微處理器ERC32為例,討論了RTEMS BSP的功能及其開發(fā)過程.實(shí)踐證明,在BSP的開發(fā)過程中,①選擇一個(gè)適當(dāng)?shù)腂SP模板,②深刻理解模板BSP中的相關(guān)概念。這兩點(diǎn)相當(dāng)重要。因?yàn)椋x擇一個(gè)相近的BSP模板可大大減少工作量和復(fù)雜度.縮短移植周期;而深刻理解相關(guān)概念有助于根據(jù)具體目標(biāo)硬件環(huán)境對(duì)模板BSP進(jìn)行正確修改,達(dá)到預(yù)期目的。
責(zé)任編輯:gt
-
嵌入式
+關(guān)注
關(guān)注
5141文章
19528瀏覽量
314905 -
cpu
+關(guān)注
關(guān)注
68文章
11033瀏覽量
215984 -
微處理器
+關(guān)注
關(guān)注
11文章
2370瀏覽量
83844
發(fā)布評(píng)論請(qǐng)先 登錄
XPS工具如何快速生成Virtex FPGA板級(jí)支持包
NUCLEO-WL55JC2開發(fā)板的BSP(板級(jí)支持包)說明
Linux與VxWorks的板級(jí)支持包開發(fā)的比較與分析
實(shí)時(shí)操作系統(tǒng)中的板級(jí)支持包BSP
SPARC微處理器綜合介紹
基于Pentium4處理器的VxWorks板級(jí)支持包設(shè)計(jì)
基于XSCALE架構(gòu)處理器WinCE系統(tǒng)BSP開發(fā)
SPARC V8結(jié)構(gòu)嵌入式微處理器的軟件集成開發(fā)環(huán)境總體設(shè)計(jì)

關(guān)于SPARC微處理器綜述
基于嵌入式處理器的Virtex FPGA板級(jí)支持包設(shè)計(jì)
如何導(dǎo)出硬件平臺(tái)并啟動(dòng)SDK開發(fā)應(yīng)用程序及板級(jí)支持包





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論