") 汽車發(fā)動(dòng)機(jī)冷卻風(fēng)扇控制芯片MV05芯片的測(cè)試方法研究
汽車發(fā)動(dòng)機(jī)冷卻風(fēng)扇控制芯片MV05芯片的測(cè)試方法研究

1 引言
在微電子行業(yè),芯片封裝好后無(wú)不例外要進(jìn)行系統(tǒng)級(jí)的驗(yàn)證,以檢查芯片功能是否正確。 MV05芯片是本課題組自主設(shè)計(jì)的一款芯片,本文介紹了一種對(duì)該芯片進(jìn)行測(cè)試的方法,上 位機(jī)通過(guò)芯片內(nèi)置的一個(gè)單獨(dú)UART 通訊模塊向下位機(jī)發(fā)送指令,再判斷芯片執(zhí)行指令是否 正確,從而確定芯片功能是否符合設(shè)計(jì)要求。
上位機(jī)使用VC++編寫(xiě)控制軟件,VC++由于功能強(qiáng)大和應(yīng)用靈活, 得到Microsoft 系統(tǒng)的 最好支持, 具有圖形界面友好、系統(tǒng)資源豐富、操作配置方便、運(yùn)行速度較快等特點(diǎn)。而串 口通信具有實(shí)現(xiàn)簡(jiǎn)單, 使用靈活方便, 數(shù)據(jù)傳輸可靠等優(yōu)點(diǎn), 因而用VC++編制串口實(shí)時(shí)控 制軟件十分方便。下位機(jī)使用匯編語(yǔ)言編程,匯編語(yǔ)言使用靈活,執(zhí)行效率高,在芯片測(cè) 試方面非常實(shí)用。MV05具有8051的所有功能,在其基礎(chǔ)上增加了PWM功能,本文只對(duì)PWM功能 測(cè)試進(jìn)行介紹。 2 芯片簡(jiǎn)介 MV05是上海大學(xué)微電子研究與開(kāi)發(fā)中心自主研發(fā)的一款芯片,完全擁有自主知識(shí)產(chǎn)權(quán), 該芯片用于對(duì)汽車發(fā)動(dòng)機(jī)冷卻風(fēng)扇的控制。此芯片含一個(gè)8051系列內(nèi)核的CPU,它的指令集 與標(biāo)準(zhǔn)8051內(nèi)核完全兼容。經(jīng)過(guò)重新設(shè)計(jì)的內(nèi)核,指令周期變?yōu)?個(gè)系統(tǒng)時(shí)鐘周期。相比標(biāo) 準(zhǔn)8051平均效率提高2.5倍。作為標(biāo)準(zhǔn)8051CPU,含有一個(gè)8位的CPU內(nèi)核,8位指令操作代碼, 8位操作數(shù),8位數(shù)據(jù)總線以及16位地址總線。內(nèi)置兩路PWM輸出,一個(gè)單獨(dú)的UART通訊模塊 , 工作電壓3.3V,采用chartered0.35um 2p4m CMOS工藝。
PWM 模塊具有自定義輸出和動(dòng)態(tài)跟蹤外部信號(hào)兩種功能,通過(guò)設(shè)置PWMMODE 來(lái)選擇這兩 種功能,而且兩路PWM 具有獨(dú)立和互補(bǔ)的工作模式。當(dāng)工作在獨(dú)立模式時(shí),兩路PWM 可獨(dú)立 輸出PWM 波。芯片的PWM 功能復(fù)用到p1 口上,其中p1.2,p1.3 用于捕獲輸入,P1.4,P1.5 用于PWM 雙通道脈寬調(diào)制輸出信號(hào)。PWM 模塊定義的寄存器如下:
PWMMODE: PWM 方式寄存器用于對(duì)對(duì)PWM 的工作方式進(jìn)行設(shè)置,包括用戶自定義模式和捕獲外部輸入信號(hào)模式。
PWMCON: PWM 控制寄存器,用來(lái)控制PWM 功能的開(kāi)啟和關(guān)閉。
Tcap1CON: 捕獲1 控制寄存器,用于設(shè)置捕獲采樣的外部信號(hào)周期數(shù)
Tcap2CON 捕獲2 控制寄存器,用于設(shè)置捕獲采樣的外部信號(hào)周期數(shù)
UTL0 PWM0輸出的周期寄存器低8 位
UTH0 PWM0輸出的周期寄存器高8 位
UWL0 PWM0輸出的脈寬寄存器低8 位
UWH0 PWM0輸出的脈寬寄存器高8 位
UTL1 PWM1輸出的周期寄存器低8 位
UTH1 PWM1輸出的周期寄存器高8 位
UWL1 PWM1輸出的脈寬寄存器低8 位
UWH1 PWM1輸出的脈寬寄存器高8 位
UTL0,UTH0 ,UWL0 ,UWH0 ,UTL1,UTH1,UWL1,UWH1 用于用戶自定義模式下PWM 波占空比的設(shè)置。
3 上下位機(jī)通信協(xié)議
上下位機(jī)進(jìn)行通信就要約定通信協(xié)議。上位機(jī)每次向下位機(jī)發(fā)送數(shù)據(jù)時(shí)首先發(fā)送“48 59 4c”3 個(gè)數(shù)據(jù), 下位機(jī)判斷接收到的前3 個(gè)數(shù)據(jù)是不是“48 59 4c”,如果是則繼續(xù)接收后 面的數(shù)據(jù),否則丟棄數(shù)據(jù)。“48,59,4c”后面緊跟的是8bit 數(shù)據(jù),下位機(jī)接收到該8bit 數(shù) 據(jù)后進(jìn)行按位解析,按照約定相應(yīng)的位進(jìn)入相應(yīng)的特殊功能寄存器,下位機(jī)配置好特殊功能 寄存器后便會(huì)執(zhí)行相應(yīng)操作,從而驗(yàn)證芯片功能是否正確。通過(guò)該協(xié)議可以降低下位機(jī)的編 程復(fù)雜度,接收一次數(shù)據(jù)就可以將所需配置的寄存器配置好,從而也提高了通信的效率。PWM 用戶自定義模式下的數(shù)據(jù)包的格式如表1 所示。

PWM 捕獲模式下與PWM 用戶自定義模式的數(shù)據(jù)包除了bit4“bit2 三位表示的意義不同 外,其余各位表示的意義相同,捕獲模式下 bit4”bit2 用來(lái)設(shè)置捕獲外部信號(hào)的周期數(shù): 000:?jiǎn)蝹€(gè)周期;001:兩個(gè)周期;010:4 個(gè)周期依次類推周期數(shù)成倍增長(zhǎng)。
4 上位機(jī)軟件設(shè)計(jì)
本文上位機(jī)軟件使用VC++6.0 開(kāi)發(fā)。使用VC++最重要的就是能夠了解控件的屬性,熟 練對(duì)控件編程。VC++6.0 中的每個(gè)控件都有一個(gè)ID 號(hào)進(jìn)行標(biāo)識(shí),每個(gè)ID 可以映射成一個(gè)變 量或響應(yīng)函數(shù)。VC++6.0 中的類是方法和變量的總和,通過(guò)例化該類使用其中的方法和變量, 如本軟件中的串口設(shè)置對(duì)話框:
CSettingDlg setDlg; // 例化
m_nPort = setDlg.m_nPort; //變量傳遞 將CsettingDlg 中的
m_nTime = setDlg.m_nTime; //變量映射到主控類的變量
m_strSettings = setDlg.m_strSettings;
4.1 串口通信模塊設(shè)計(jì)
在Microsoft Windows 下開(kāi)發(fā)串行通信程序的方法有:(1)利用WindowsAPI通信函 數(shù)(2)利用Windows的讀寫(xiě)端口函數(shù)或開(kāi)發(fā)驅(qū)動(dòng)程序直接對(duì)串口進(jìn)行操作(3)利用第三方 提供的通信類(4)使用串口通信組件。其中第四種方法較簡(jiǎn)單,只需要對(duì)串口進(jìn)行簡(jiǎn)單設(shè)置。本上位機(jī)串口通信程序使用MSComm控件進(jìn)行開(kāi)發(fā)。
MSComm控件是Microsoft公司提供 的簡(jiǎn)化Windows下串行接口收發(fā)數(shù)據(jù)的簡(jiǎn)便方法。MSComm處理數(shù)據(jù)有兩種方法, 查詢法和事 件驅(qū)動(dòng)法,本文使用事件驅(qū)動(dòng)法。 串口設(shè)置對(duì)話框獨(dú)立于主對(duì)話框,通過(guò)串口設(shè)置按鈕彈出,用戶可以在串口設(shè)置對(duì)話框 中進(jìn)行串口選擇,設(shè)置波特率、停止位、校驗(yàn)位等參數(shù)。軟件在主控類中定義了一個(gè)全局 變量m_strSendString,上位機(jī)要發(fā)送的數(shù)據(jù)賦給該變量,然后通過(guò)發(fā)送函數(shù)發(fā)送出去。
4.2 PWM 模塊
PWM 模塊包括PWM 用戶自定義模塊和PWM 捕獲模塊,PWM 捕獲模塊與PWM 用戶自定義模 塊在控件使用和編程思想上是一樣的,只不過(guò)數(shù)據(jù)包各位代表的意義不同,因此這里只介紹 PWM 用戶自定義模塊,PWM 捕獲模塊不再贅述。
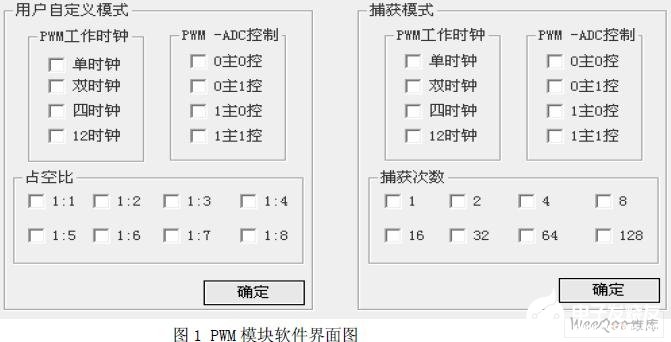
PWM 用戶自定義模塊可以設(shè)置芯片PWM 模塊的工作周期和PWM 波不同占空比,另外還增 加了ADC 聯(lián)動(dòng)功能。增加ADC 聯(lián)動(dòng)功能是為了測(cè)試下一款芯片功能設(shè)計(jì)的,此次測(cè)試并未用 到。PWM 模塊的工作周期選擇,PWM 波占空比選擇和ADC 聯(lián)動(dòng)功能選擇用復(fù)選框表示,用戶 根據(jù)自己測(cè)試需要,選擇不同的選項(xiàng),最后按“確定”按鈕將所選項(xiàng)目封裝成數(shù)據(jù)包,按“啟 動(dòng)PWM”按鈕將測(cè)試指令發(fā)送到下位機(jī),進(jìn)行測(cè)試。
根據(jù)通信協(xié)議將用戶選擇測(cè)試的項(xiàng)目封裝成一個(gè)8 位數(shù)據(jù)包,該數(shù)據(jù)包存放在一個(gè)整型 數(shù)組里面,將該8 位數(shù)據(jù)看作是一個(gè)字符的二進(jìn)制表示,根據(jù)每位數(shù)據(jù)所占的權(quán)值取加權(quán)和 得到一個(gè)10 進(jìn)制數(shù),最后將該10 進(jìn)制數(shù)轉(zhuǎn)化為一個(gè)16 進(jìn)制數(shù),該16 進(jìn)制數(shù)就是最終要封 裝的數(shù)據(jù)包。為了防止用戶誤選測(cè)試項(xiàng)目,軟件中作了一些安全處理,當(dāng)用戶選擇同類中的 一個(gè)測(cè)試項(xiàng)目后其它項(xiàng)目會(huì)變?yōu)椴豢蛇x。軟件界面如圖1 所示。
PWM 用戶自定義模式下數(shù)據(jù)包封裝函數(shù)代碼如下:
void CCommWizardDlg::OnButtonUsrMode()
{ UpdateData(TRUE); //數(shù)據(jù)更新
CString strtemp;
int s1; //存放數(shù)據(jù)包數(shù)據(jù)的數(shù)組
unsigned char c1;
// 時(shí)鐘選擇
if(this-》m_Check1) {s1=0;s1=0;}// 單時(shí)鐘
if(this-》m_Check2) {s1=0;s1=1;}// 雙時(shí)鐘
if(this-》m_Check3) {s1=1;s1=0;}// 四時(shí)鐘
if(this-》m_Check4) {s1=1;s1=1;}// 12 時(shí)鐘
//占空比設(shè)置
if(this-》m_Check9) {s1=0;s1=0;s1=0;}// 1:1
if(this-》m_Check10) {s1=0;s1=0;s1=1;}// 1:2
if(this-》m_Check11) {s1=0;s1=1;s1=0;}//1:3
if(this-》m_Check12) {s1=0;s1=1;s1=1;}//1:4
if(this-》m_Check13) {s1=1;s1=0;s1=0;}//1:5
if(this-》m_Check14) {s1=1;s1=0;s1=1;}// 1:6
if(this-》m_Check15) {s1=1;s1=1;s1=0;}// 1:7
if(this-》m_Check16) {s1=1;s1=1;s1=1;}// 1:8
//PWM -ADC 控制
if(this-》m_Check5) {s1=0;s1=0;}// 0 主0 控
if(this-》m_Check6) {s1=0;s1=1;}// 0 主1 控
if(this-》m_Check7) {s1=1;s1=0;}// 1 主0 控
if(this-》m_Check8) {s1=1;s1=1;}// 1 主1 控
s1[0]=0; //用戶自定義模式選擇
c1=s1[0]*128+s1*64+s1*32+s1*16+s1*8+s1*4+s1*2+s1*1 ;
strtemp.Format(“%02X ”,c1); //10 進(jìn)制轉(zhuǎn)化為16 進(jìn)制
m_strSendString=(CString)“48 59 4C ” + strtemp ;
}
5 下位機(jī)軟件
下位機(jī)軟件包括串口通信模塊和PWM 功能配置模塊。串口部分使用中斷方式接收數(shù)據(jù), 當(dāng)接收到上位機(jī)的命令執(zhí)行中斷服務(wù)程序轉(zhuǎn)到PWM 功能配置模塊,PWM 功能模塊對(duì)接收到的 數(shù)據(jù)進(jìn)行按位解析,根據(jù)通信協(xié)議將不同的數(shù)據(jù)位送到不同的寄存器。該方法對(duì)其它測(cè)試系 統(tǒng)具有借鑒意義。
6 結(jié)束語(yǔ)
本文介紹了上海大學(xué)微電子研究與開(kāi)發(fā)中心研發(fā)的一款汽車發(fā)動(dòng)機(jī)冷卻風(fēng)扇控制芯片, 給出一種使用VC++6.0編寫(xiě)上位機(jī)軟件對(duì)其進(jìn)行測(cè)試的方法。本文的創(chuàng)新點(diǎn)是構(gòu)造數(shù)據(jù)封裝 函數(shù),將用戶要測(cè)試的項(xiàng)目一次發(fā)送給下位機(jī),下位機(jī)按位解析數(shù)據(jù)包,將相應(yīng)數(shù)據(jù)位送入 相應(yīng)寄存器。通過(guò)調(diào)試證明該方法是完全可行的,提高了測(cè)試效率,測(cè)試結(jié)果達(dá)到了預(yù)期設(shè) 計(jì)指標(biāo),芯片功能完全正確。
責(zé)任編輯:gt
-
芯片
+關(guān)注
關(guān)注
459文章
52471瀏覽量
440441 -
發(fā)動(dòng)機(jī)
+關(guān)注
關(guān)注
33文章
2543瀏覽量
70964 -
汽車電子
+關(guān)注
關(guān)注
3037文章
8342瀏覽量
170114
發(fā)布評(píng)論請(qǐng)先 登錄
CA1261 汽車發(fā)動(dòng)機(jī)懸置系統(tǒng)隔振的研究
CA1261汽車發(fā)動(dòng)機(jī)懸置系統(tǒng)隔振的研究
基于CAN總線的汽車發(fā)動(dòng)機(jī)智能電子控制器研究
汽車發(fā)動(dòng)機(jī)升級(jí)產(chǎn)品解決汽車發(fā)動(dòng)機(jī)燃燒問(wèn)題。
汽車發(fā)動(dòng)機(jī)構(gòu)造與20個(gè)汽車發(fā)動(dòng)機(jī)維修詳細(xì)案例
汽修冷卻液溫度傳感器信號(hào)汽車示波器測(cè)量
汽車發(fā)動(dòng)機(jī)缸壓測(cè)試示波器測(cè)量
冷卻風(fēng)扇系統(tǒng)發(fā)生故障的原因
汽車發(fā)動(dòng)機(jī)冷卻風(fēng)扇智能控制系統(tǒng)的研究
汽車發(fā)動(dòng)機(jī)智能冷卻系統(tǒng)設(shè)計(jì)

基于PROTEUS和LABVIEM的發(fā)動(dòng)機(jī)冷卻液溫度監(jiān)控系統(tǒng)
汽車發(fā)動(dòng)機(jī)冷卻系統(tǒng)保養(yǎng)簡(jiǎn)介
發(fā)動(dòng)機(jī)冷卻系統(tǒng)故障及檢修方法
示波器測(cè)量汽車發(fā)動(dòng)機(jī)冷卻風(fēng)扇信號(hào)及分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論