") 車載導(dǎo)航中常用的GNSS模塊運(yùn)用
車載導(dǎo)航中常用的GNSS模塊運(yùn)用

車載導(dǎo)航就是借助嵌入式GNSS模塊,接收、解調(diào)衛(wèi)星的廣播C/A碼信號(hào)。通過運(yùn)算與每個(gè)衛(wèi)星的偽距離,采用距離交會(huì)法得出接收機(jī)的經(jīng)度、緯度、高度和時(shí)間修正量這四個(gè)參數(shù)。GPS模塊通過串行通信口不斷輸出NMEA格式的定位信息及輔助信息,供接收者選擇應(yīng)用。本篇SKYLAB君帶大家一起盤點(diǎn)車載導(dǎo)航中常用的GNSS模塊運(yùn)用。
車載導(dǎo)航
SKYLAB的GNSS模塊根據(jù)支持衛(wèi)星信號(hào)的頻段,分為單頻GPS定位模塊、單頻北斗定位模塊和單頻北斗多模定位模塊、雙頻北斗多模定位模塊;根據(jù)定位精度的不同分為標(biāo)準(zhǔn)高精度GNSS定位模塊和RTK高精度GNSS定位模塊;根據(jù)使用方式的不同分為嵌入式內(nèi)置型GNSS定位模塊和外置型天線一體化GNSS G-mouse成品;根據(jù)模塊性能的不同分為標(biāo)準(zhǔn)高精度GNSS定位模塊,RTK高精度GNSS定位模塊,弱信號(hào)GNSS+INS慣性組合導(dǎo)航模塊和GNSS授時(shí)模塊等。
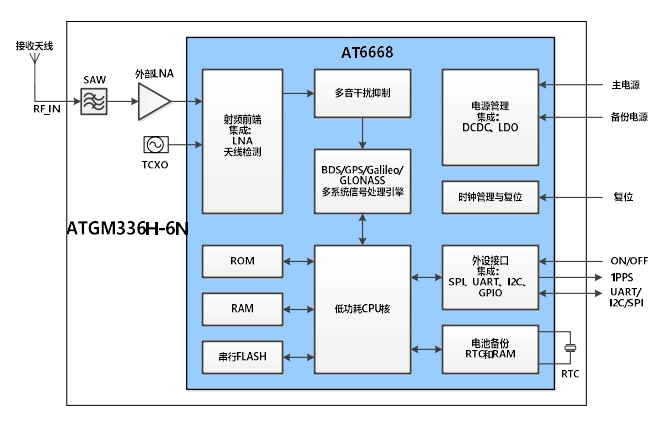
標(biāo)準(zhǔn)高精度定位導(dǎo)航:從移動(dòng)互聯(lián)到物聯(lián)網(wǎng),位置是一個(gè)基礎(chǔ)的不可或缺的信息,汽車行駛在路上,需要實(shí)時(shí)判斷自己的位置,并利用內(nèi)置的標(biāo)準(zhǔn)高精度GNSS定位模塊獲取的位置信息,配合電子地圖來實(shí)現(xiàn)導(dǎo)航,它能方便且準(zhǔn)確地告訴駕駛者去往目的地的最短或者最快路徑。SKYLAB研發(fā)推出的標(biāo)準(zhǔn)高精度定位模塊(單頻GPS,單頻BDS,單頻北斗多模、雙頻北斗多模、天線一體化模塊、G-mouse),可以為車載和便攜式手持等定位終端產(chǎn)品的制造提供了高靈敏度、高精度、低成本的定位、導(dǎo)航等解決方案,能滿足專業(yè)定位的嚴(yán)格要求與個(gè)人消費(fèi)需要。
RTK高精度定位導(dǎo)航:隨著新基建熱潮的到來,借助5G+新基建的東風(fēng),無人駕駛,自動(dòng)駕駛等技術(shù)正在逐步完善,對(duì)智能駕駛汽車來說,車道很窄,和路邊的障礙物之間的距離也較短。這意味著,汽車對(duì)定位精度的要求是10到30厘米。SKYLAB研發(fā)推出的RTK高精度定位模塊,內(nèi)置RTK算法,同時(shí)支持BDS、GPS雙衛(wèi)星定位系統(tǒng),配合全國(guó)北斗增強(qiáng)網(wǎng)的高精度定位服務(wù),可以達(dá)到實(shí)時(shí)厘米級(jí)定位精度,滿足智能駕駛汽車的高精度定位需求。
弱信號(hào)慣性組合導(dǎo)航:汽車行駛在路上,視野可能會(huì)受到周邊的樹木、同行的卡車、城市樓群的遮擋,衛(wèi)星導(dǎo)航系統(tǒng)容易受到周圍環(huán)境的影響,例如樹木樓房等,造成多路徑效應(yīng),使得定位結(jié)果精度降低甚至丟失,尤其是在隧道或者室內(nèi)環(huán)境中,衛(wèi)星導(dǎo)航系統(tǒng)基本無法使用。SKYLAB弱信號(hào)慣性組合導(dǎo)航模塊提供實(shí)時(shí)高精度的車輛定位、測(cè)速和測(cè)姿信息,在GNSS系統(tǒng)的信號(hào)精度降低甚至丟失衛(wèi)星信號(hào)時(shí),不借助里程計(jì)信息,利用純慣性導(dǎo)航技術(shù),也可在較長(zhǎng)時(shí)間內(nèi)單獨(dú)對(duì)汽車載體進(jìn)行高精度定位、測(cè)速和測(cè)姿,解決弱信號(hào)環(huán)境下車輛定位漂移或無法接收衛(wèi)星信號(hào)的問題。
GNSS授時(shí)模塊高精度授時(shí):為了實(shí)現(xiàn)自動(dòng)化、智能化,任何涉及各子系統(tǒng)協(xié)同工作的應(yīng)用場(chǎng)景都需要時(shí)間同步,電力、軌道交通、通訊、基站以及金融等市場(chǎng)容量約為100億左右。自動(dòng)駕駛、遠(yuǎn)程醫(yī)療等極低時(shí)延場(chǎng)景對(duì)時(shí)間同步精度的要求更高。SKYLAB復(fù)合型GNSS授時(shí)模塊和高精度GNSS授時(shí)模塊能夠滿足車聯(lián)網(wǎng)中的時(shí)間同步需求。
GNSS模塊選型表
上述標(biāo)準(zhǔn)高精度GNSS定位模塊、RTK高精度GNSS定位模塊、GNSS+INS慣性組合導(dǎo)航模塊、GNSS授時(shí)模塊均為工業(yè)級(jí)定位模塊,模塊封裝多樣,奉上SKYLAB GNSS模塊選型表,具體型號(hào)及參數(shù)特性可戳SKYLAB官網(wǎng)對(duì)應(yīng)產(chǎn)品圖片,下載規(guī)格書,或直接在線咨詢。
-
北斗
+關(guān)注
關(guān)注
3文章
678瀏覽量
36820 -
GNSS
+關(guān)注
關(guān)注
9文章
873瀏覽量
49368 -
定位模塊
+關(guān)注
關(guān)注
0文章
106瀏覽量
16721 -
北斗模塊
+關(guān)注
關(guān)注
1文章
78瀏覽量
8116
發(fā)布評(píng)論請(qǐng)先 登錄
GNSS信號(hào)丟失時(shí),組合導(dǎo)航系統(tǒng)依然保持精準(zhǔn)導(dǎo)航

GNSS和INS有什么區(qū)別?深度解析高精度組合導(dǎo)航技術(shù)
羅德與施瓦茨與u-blox合作驗(yàn)證最新汽車GNSS模塊
革新精準(zhǔn)導(dǎo)航:全球最精確的 GNSS/MEMS INS 系統(tǒng)
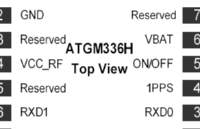
GNSS多模定位導(dǎo)航模塊數(shù)據(jù)手冊(cè):ATGH336H-6N74
PNT、GNSS與GPS:衛(wèi)星定位導(dǎo)航技術(shù)的清晰區(qū)分

新品| GPS V2.0,高性能GNSS全球定位模塊

適用于GNSS(衛(wèi)星導(dǎo)航系統(tǒng))的國(guó)產(chǎn)溫補(bǔ)晶振,替換SiTime

GNSS信號(hào)不穩(wěn)定?測(cè)繪級(jí)GNSS+INS組合導(dǎo)航,一鍵解決難題
高精度GNSS+INS組合導(dǎo)航:速度、位置、姿態(tài)全掌握

E108-GN系列GNSS多模衛(wèi)星導(dǎo)航定位模塊產(chǎn)品說明
ATGM336H-5N杭州中科微BDS定位導(dǎo)航模塊技術(shù)規(guī)范
ATGM336H-5N杭州中科微BDS/GNSS全星座定位導(dǎo)航模塊電氣參數(shù)
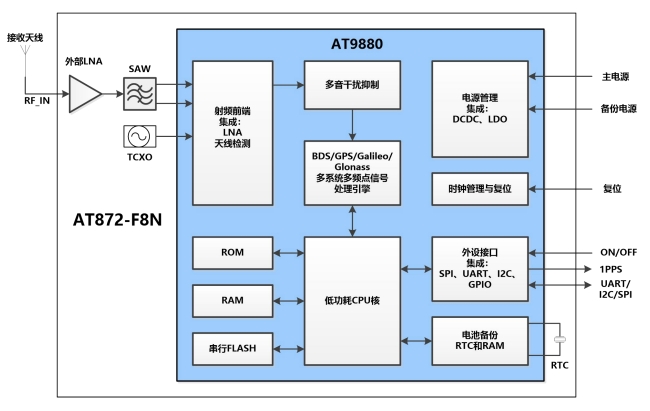
AT872-F8N高性能GNSS全模多頻定位導(dǎo)航模塊數(shù)據(jù)手冊(cè)
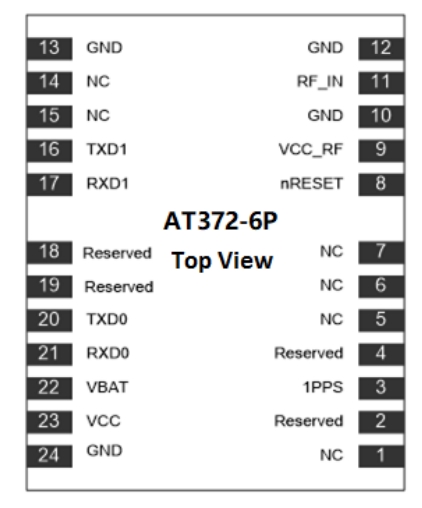
AT372-6P杭州中科微GNSS單頻RTK高精度定位模塊datasheet





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論