 機器人控制的主要驅動裝置配置
機器人控制的主要驅動裝置配置

KUKA外部軸的配置方法
1、連接控制柜和外部軸的動力線和編碼器線
(外部軸動力線)
2、Workvisual外部軸添加與配置
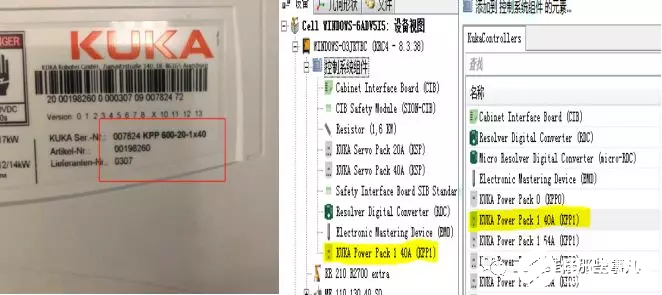
(1)根據機器人控制柜內部實際的KPP和KSP型號添加:
(右鍵控制系統組件添加)
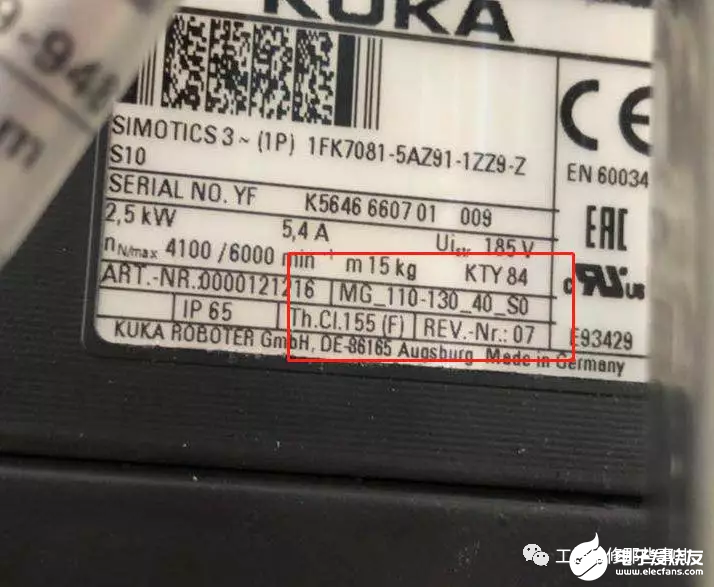
(2)確認電機銘牌上的電機型號:
(開頭MG/ME光軸與鍵槽軸的區別)
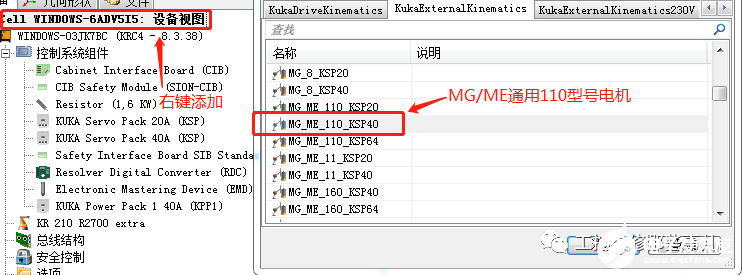
(3)根據電機型號添加選項:
(右鍵設備視圖添加電機型號)
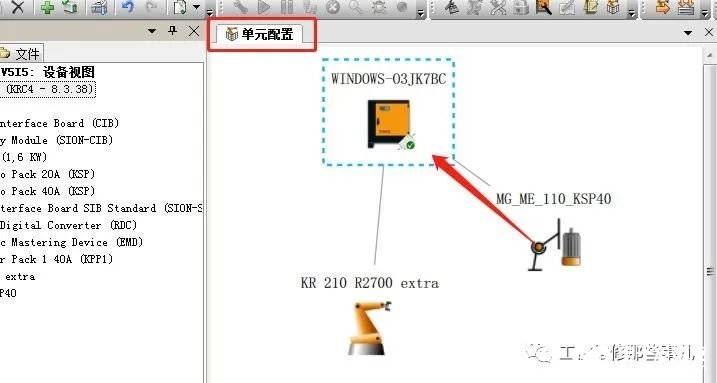
(4)在單元配置中將添加的外部軸電機與控制柜連接:
(拖住電機連接控制柜)
(5)右鍵電機--驅動裝置配置--(根據實際接線圖連接電機)
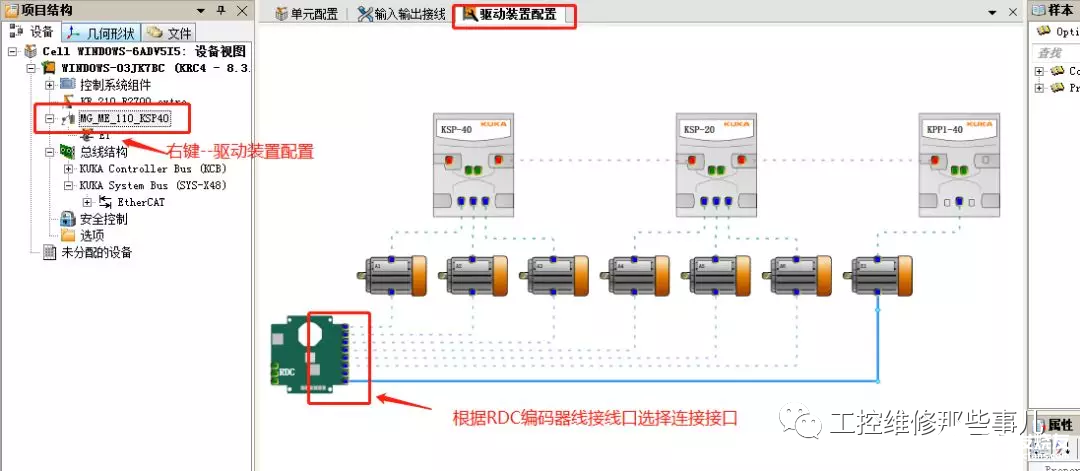
(外部軸電機連接錯誤,導入項目提示報警編碼器故障)
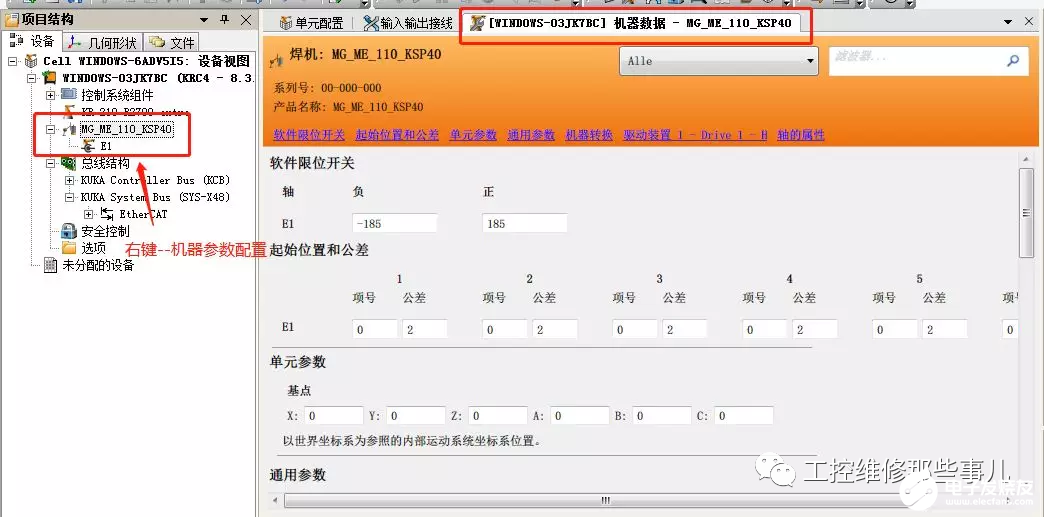
(6)右鍵電機--機器參數配置(配置電機需要的參數):
(7)配置完成后,項目編譯導入機器人控制柜。
(8)導入項目后進行安全配置:(注意切換安全員用戶)
(9)外部軸零點丟失(進行零點校正)
(10)外部軸動作方式的切換
責任編輯:pj
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29737瀏覽量
212861 -
驅動
+關注
關注
12文章
1918瀏覽量
86930
發布評論請先 登錄
相關推薦
熱點推薦
輪式移動機器人電機驅動系統的研究與開發
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間
發表于 06-11 14:30
盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
,配備高性能的電機和傳動裝置,為機器人提供穩定的動力輸出。通過精確的電機控制算法,機器人可以實現前進、后退、轉彎等各種動作,并且能夠根據不同的地面狀況和行走需求,靈活調整行走速度和姿態
發表于 05-10 18:26
主要人形機器人廠商的電機驅動與傳感系統對比
、諧波減速器、雙位置編碼器等于一體,可支持≥200?Nm的峰值扭矩。伺服驅動器能夠實現高精度的角度/速度/力矩控制,是機器人運動的基礎。 無刷直流電機 (BLDC) :BLDC電機具有高效率、高功率密度和長壽命等優點,被廣泛用于
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
講解了如何在 ROS 2 中實現機器人的運動控制,包括速度控制、位置控制等。通過編寫運動控制節點,可以接收來自上層的
發表于 04-27 11:24
雅特力科技助力宇樹科技推動智慧機器人創新應用:深入布局機器人電機控制核心
年前突破千億美元規模,其中仿生型與多自由度機器人將為成長速度最快的細分領域。智能機器人控制系統主要由控制單元、感測單元與

震動馬達:機器人領域中的關鍵驅動力量
在機器人領域,震動馬達作為一種重要的驅動裝置,發揮著不可忽視的作用。它通過精準的震動控制,不僅能提升機器人的反饋體驗,還能增強
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主
發表于 01-04 19:22
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
近年來,人工智能領域的大模型技術在多個方向上取得了突破性的進展,特別是在機器人控制領域展現出了巨大的潛力。在“具身智能機器人大模型”部分,作者研究并探討了大模型如何提升機器人的能力,大
發表于 12-29 23:04
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
與未來,涵蓋如基于行為的人工智能、生物啟發的進化人工智能及認知機器人技術的發展。這一歷史背景為隨后的大模型驅動的具身智能討論奠定了基礎,隨著人工智能模型復雜性和能力的不斷提升,這一主題也變得愈加
發表于 12-28 21:12
伺服控制機器人的控制方式有哪些
伺服控制機器人是一種高度精確的自動化設備,它能夠執行復雜的任務,如精確定位、重復運動和力控制。伺服控制系統是機器人技術中的核心部分,它負責接
開源項目!用ESP32做一個可愛的無用機器人
簡介
作者在完成碩士論文答辯后,利用空閑時間制作了一個他一直想做的機器人——可愛無用機器人。
無用機器人原理是一個連接到開關的電機,通過邏輯門控制。當開關被推到“開”時,
發表于 09-03 09:34
開源項目!用ESP32做一個可愛的無用機器人
簡介
作者在完成碩士論文答辯后,利用空閑時間制作了一個他一直想做的機器人——可愛無用機器人。
無用機器人原理是一個連接到開關的電機,通過邏輯門控制。當開關被推到“開”時,
發表于 08-30 14:50
柔性機器人和剛性機器人有什么區別?
則由剛性桿及其關節連接構成,運動自由度相對較少。控制方式:柔性機器人通常采用基于力和視覺感知的控制系統,而剛性機器人則主要采用編程






 工商網監
工商網監
評論