") 激光雷達(dá)傳感技術(shù)的工作原理及其技術(shù)特點(diǎn)的分析
激光雷達(dá)傳感技術(shù)的工作原理及其技術(shù)特點(diǎn)的分析
(文章來源:好嘿科技)
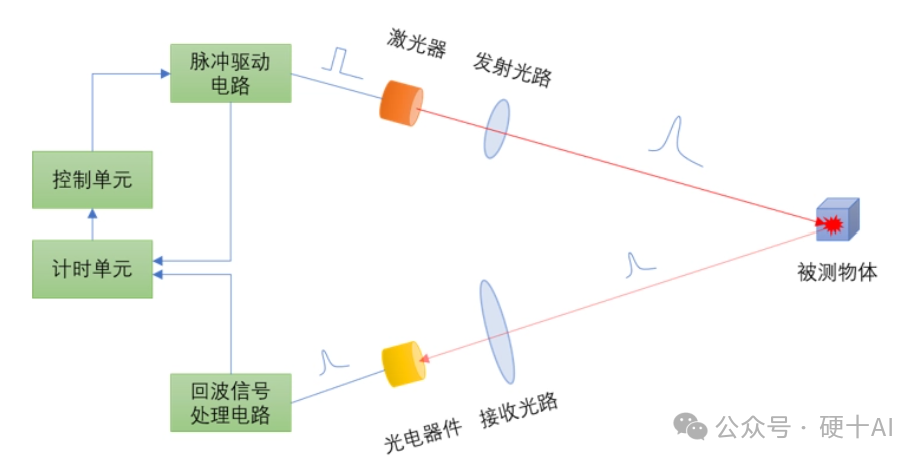
激光雷達(dá)的工作原理與雷達(dá)非常相近,以激光作為信號源,由激光器發(fā)射出的脈沖激光,打到地面的樹木,道路,橋梁和建筑物上引起散射,一部分光波會反射到激光雷達(dá)的接收器上,根據(jù)激光測距原理計算,就得到從激光雷達(dá)到目標(biāo)點(diǎn)的距離。
脈沖激光不斷地掃描目標(biāo)物,就可以得到目標(biāo)物上全部目標(biāo)點(diǎn)的數(shù)據(jù),用此數(shù)據(jù)進(jìn)行成像處理后,就可得到精確的三維立體圖像。也可以測量兩個或多個距離,并計算其變化率而求得速度,這是、也是直接探測型雷達(dá)的基本工作原理。
LiDAR系統(tǒng)一般包括;激光源或其它發(fā)射器,靈敏的光電探測器或其它接收器,同步和數(shù)據(jù)處理電子系統(tǒng),運(yùn)動控制設(shè)備或微機(jī)電系統(tǒng)(MEMS)掃描鏡(二選一)。均是基于精確的激光掃描組件并可用于創(chuàng)建3D地圖或收集近距離數(shù)據(jù)。
民用和商業(yè)應(yīng)用中,保證用眼安全的激光器在高性能緊湊型LiDAR中越來越受歡迎。在用眼安全的波長范圍內(nèi),當(dāng)在地形測繪和避障中探測固體時,通常需要約紅外激光器發(fā)射1.5 m的波長。
傳統(tǒng)的雷達(dá)是以微波和毫米波波段的電磁波為載波的雷達(dá)。激光雷達(dá)則是以激光作為載波,可以用振幅、頻率和相位來搭載信息作為載體。因此,激光雷達(dá)有以下優(yōu)于微波及毫米波的一些特點(diǎn):
1、極高的分辨率,激光雷達(dá)工作于光學(xué)波段,頻率比微波高2~3個數(shù)量級以上,因此,與微波雷達(dá)相比,激光雷達(dá)具有很高的距離分辨率、角分辨率和速度分辨率;
2、高抗干擾能力,激光波長短,可發(fā)射發(fā)散角非常小的激光束,多路徑效應(yīng)小(不會像微波或者毫米波一樣產(chǎn)生多徑效應(yīng)),可探測低空或超低空目標(biāo);
3、豐富的信息量,可直接獲取目標(biāo)的距離、角度、反射強(qiáng)度、速度等信息,生成目標(biāo)多維度圖像;
4、不受光線影響,不受光線影響,激光掃描儀可全天候進(jìn)行偵測任務(wù)。它只需發(fā)射自己的激光束,通過探測發(fā)射激光束的回波信號來獲取目標(biāo)信息。
(責(zé)任編輯:fqj)
-
傳感技術(shù)
+關(guān)注
關(guān)注
5文章
544瀏覽量
46855 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4189瀏覽量
191883
發(fā)布評論請先 登錄
激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析

激光雷達(dá)技術(shù)在自動駕駛汽車中的應(yīng)用

激光雷達(dá)技術(shù):自動駕駛的應(yīng)用與發(fā)展趨勢

DeepSeek:2025年激光雷達(dá)技術(shù)與行業(yè)應(yīng)用趨勢

激光雷達(dá)領(lǐng)域的新秀利器—SPAD23

科普:一文了解固態(tài)和半固態(tài)激光雷達(dá)
激光雷達(dá)的工作原理和分類





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論