") 研究人員推出了一種新的基于深度學(xué)習(xí)的策略
研究人員推出了一種新的基于深度學(xué)習(xí)的策略
為了與周圍環(huán)境有效交互,機器人應(yīng)該能夠像人類一樣通過觸摸不同物體來識別它們的特征。通過使用傳感器收集的反饋來調(diào)整他們的抓握和操縱策略,這將使他們能夠更有效地抓握和管理對象。
考慮到這一點,全世界的研究小組一直在嘗試開發(fā)可通過分析傳感器收集的數(shù)據(jù)來使機器人具有觸覺的技術(shù),其中許多都是基于深度學(xué)習(xí)架構(gòu)的使用。盡管其中一些方法很有希望,但它們通常需要大量的訓(xùn)練數(shù)據(jù),并且無法始終很好地概括以前沒有學(xué)習(xí)過的物體。
蘇黎世聯(lián)邦理工學(xué)院的研究人員最近推出了一種新的基于深度學(xué)習(xí)的策略,該策略可以在不需要大量真實數(shù)據(jù)的情況下在機器人中實現(xiàn)觸覺傳感。在arXiv上預(yù)先發(fā)表的一篇論文中概述了他們的方法,該方法需要完全在模擬數(shù)據(jù)上訓(xùn)練深度神經(jīng)網(wǎng)絡(luò)。
進行這項研究的研究人員之一卡洛·斯費拉扎(Carlo Sferrazza)說:“我們的技術(shù)從數(shù)據(jù)中學(xué)習(xí)如何預(yù)測與傳感表面接觸的物體施加的力的分布,到目前為止,這些數(shù)據(jù)(成千上萬個數(shù)據(jù)點)需要在幾個小時的實驗設(shè)置中收集,這在時間和設(shè)備方面都是昂貴的。在這項工作中,我們完全在模擬,在現(xiàn)實世界中部署我們的技術(shù)時可保持較高的傳感精度。”
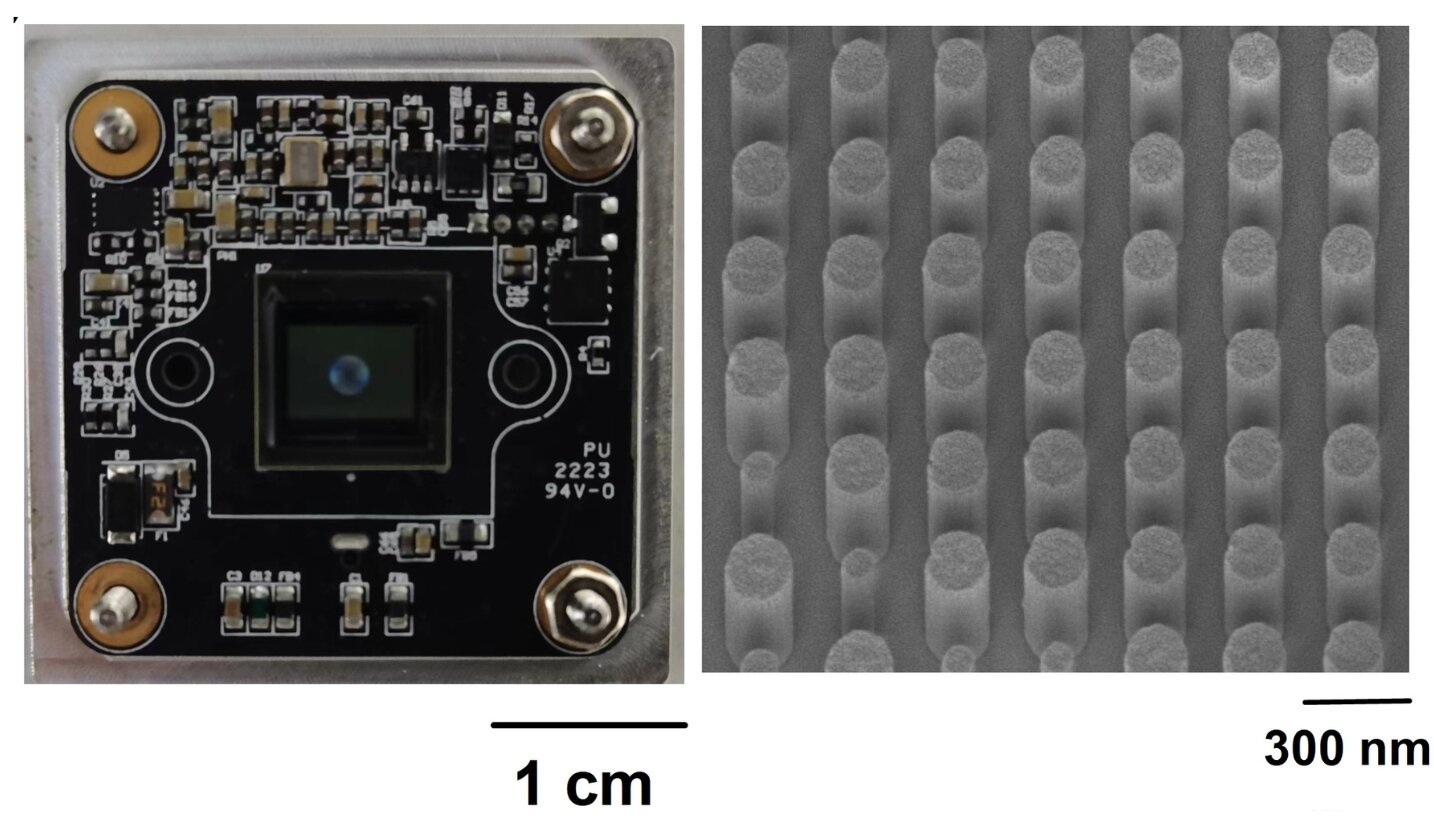
在實驗中,Sferrazza和他的同事使用他們制造的帶有簡單且低成本組件的傳感器,該傳感器由置于軟質(zhì)材料下方的標準相機組成,該材料包含隨機散布的微小塑料顆粒。
當(dāng)對其表面施加力時,軟材料會變形并導(dǎo)致塑料顆粒移動,然后,該運動由傳感器的攝像頭捕獲并記錄。
Sferrazza解釋說:“我們利用由移動粒子產(chǎn)生的圖像圖案來提取有關(guān)導(dǎo)致材料變形的力的信息。通過將粒子密集地嵌入到材料中,我們可以獲得極高的分辨率。由于我們采用數(shù)據(jù)驅(qū)動的方法來解決此任務(wù),因此,我們可以克服建模與軟材料接觸的復(fù)雜性,并以較高的方式估算這些力的分布準確性。”
本質(zhì)上,研究人員使用最新的計算方法創(chuàng)建了傳感器的軟材料和相機投影的模型。然后,他們在仿真中使用了這些模型,以創(chuàng)建包含13448張合成圖像的數(shù)據(jù)集,非常適合訓(xùn)練觸覺感應(yīng)算法。他們在仿真中為其觸覺感應(yīng)模型生成訓(xùn)練數(shù)據(jù)這一事實方面具有極大的優(yōu)勢,因為這避免了他們不得不在現(xiàn)實世界中收集和注釋數(shù)據(jù)。
Sferrazza說:“我們還開發(fā)了一種轉(zhuǎn)移學(xué)習(xí)技術(shù),使我們可以在現(xiàn)實世界中生產(chǎn)的觸覺傳感器的多個實例上使用相同的模型,而無需其他數(shù)據(jù)。這意味著每個傳感器的生產(chǎn)成本變得更低,因為它們不需要額外的校準工作。”
研究人員使用他們創(chuàng)建的綜合數(shù)據(jù)集來訓(xùn)練基于視覺的觸覺應(yīng)用的神經(jīng)網(wǎng)絡(luò)架構(gòu),然后通過一系列測試評估其性能。即使經(jīng)過模擬訓(xùn)練,神經(jīng)網(wǎng)絡(luò)也取得了非凡的結(jié)果,可以對真實數(shù)據(jù)進行準確的感測預(yù)測。
“當(dāng)我們訓(xùn)練的量身定制的神經(jīng)網(wǎng)絡(luò)體系結(jié)構(gòu)應(yīng)用于與我們的模擬中所使用的數(shù)據(jù)完全不同的數(shù)據(jù)時,例如在估計與任意一個或多個對象的接觸時,也顯示出非常有希望的泛化可能性,可用于其他情況形狀。” Sferrazza說。
由Sferrazza和他的同事開發(fā)的深度學(xué)習(xí)體系結(jié)構(gòu)可以為機器人提供人為的觸摸感,從而有可能增強其抓握和操縱技能。此外,他們編輯的綜合數(shù)據(jù)集可用于訓(xùn)練其他模型以進行觸覺感測,或啟發(fā)創(chuàng)建新的基于仿真的數(shù)據(jù)集。
Sferrazza說:“我們現(xiàn)在要在涉及與復(fù)雜對象的非常普通的交互的任務(wù)中評估我們的算法,并且我們也在努力提高其準確性。我們認為這項技術(shù)在應(yīng)用于現(xiàn)實世界的機器人任務(wù)時將顯示出其優(yōu)勢,例如對易碎物體(例如玻璃或雞蛋)進行精細操縱的應(yīng)用。”
-
機器人
+關(guān)注
關(guān)注
213文章
29508瀏覽量
211630 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4809瀏覽量
102826 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5555瀏覽量
122495
發(fā)布評論請先 登錄
研究人員開發(fā)出基于NVIDIA技術(shù)的AI模型用于檢測瘧疾
研究人員利用激光束開創(chuàng)量子計算新局面
NPU在深度學(xué)習(xí)中的應(yīng)用
一種基于深度學(xué)習(xí)的二維拉曼光譜算法

AI大模型與深度學(xué)習(xí)的關(guān)系
英特爾推出全新實感深度相機模組D421
FPGA做深度學(xué)習(xí)能走多遠?
NVIDIA推出全新深度學(xué)習(xí)框架fVDB
PyTorch深度學(xué)習(xí)開發(fā)環(huán)境搭建指南
深度學(xué)習(xí)中反卷積的原理和應(yīng)用
深度神經(jīng)網(wǎng)絡(luò)(DNN)架構(gòu)解析與優(yōu)化策略
深度學(xué)習(xí)與nlp的區(qū)別在哪
深度學(xué)習(xí)常用的Python庫
研究人員提出一種電磁微鏡驅(qū)動系統(tǒng)
研究人員利用人工智能提升超透鏡相機的圖像質(zhì)量





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論