") Segway Robotics團(tuán)隊(duì)以絕對(duì)優(yōu)勢(shì)獲IROS 2019 SLAM挑戰(zhàn)賽冠軍
Segway Robotics團(tuán)隊(duì)以絕對(duì)優(yōu)勢(shì)獲IROS 2019 SLAM挑戰(zhàn)賽冠軍
11月4日,全球機(jī)器人規(guī)模最大的學(xué)術(shù)會(huì)議之一——IEEE智能機(jī)器人與系統(tǒng)國(guó)際會(huì)議(IROS)在澳門正式開(kāi)幕,大會(huì)吸引了4000多名世界各地的機(jī)器人、自動(dòng)化系統(tǒng)及人工智能等領(lǐng)域的專業(yè)人士、頂尖研究團(tuán)隊(duì)代表及企業(yè)界人士。 本屆大會(huì)除了聚焦最新機(jī)器人研究成果,期間還舉辦了Lifelong SLAM挑戰(zhàn)賽。今年的機(jī)器人挑戰(zhàn)賽聚焦機(jī)器視覺(jué)前沿領(lǐng)域,旨在通過(guò)比賽探索,賦予AI終生學(xué)習(xí)能力。最終,來(lái)自九號(hào)機(jī)器人有限公司的Segway Robotics團(tuán)隊(duì)以絕對(duì)優(yōu)勢(shì)獲得了冠軍。
今年IROS機(jī)器人挑戰(zhàn)賽包括兩項(xiàng)賽事,其中一項(xiàng)是Lifelong SLAM——適應(yīng)場(chǎng)景變化的定位算法競(jìng)賽,比拼的是機(jī)器人通過(guò)視覺(jué)進(jìn)行持續(xù)自我定位的能力,著重考察SLAM算法能否在視角、光照和場(chǎng)景布置發(fā)生變化時(shí)穩(wěn)定識(shí)別自身位置,從而支持機(jī)器人的長(zhǎng)期部署。 為配合本項(xiàng)賽事,研究人員制作發(fā)布了全新的SLAM數(shù)據(jù)集——OpenLORIS-Scene。與以往SLAM數(shù)據(jù)集相比,OpenLORIS-Scene數(shù)據(jù)集中包含的場(chǎng)景更貼近生活,傳感器配置更豐富,并且對(duì)每個(gè)場(chǎng)景進(jìn)行多次錄制,從而包含真實(shí)生活導(dǎo)致的場(chǎng)景變化。因此,OpenLORIS-Scene數(shù)據(jù)集成為SLAM算法能否支持機(jī)器人真實(shí)部署的試金石。 本次比賽過(guò)程中,OpenLORIS-Scene使用SegwayRobotics團(tuán)隊(duì)研發(fā)的Segway配送機(jī)器人S1來(lái)收集數(shù)據(jù)。據(jù)悉,S1支持加裝多個(gè)傳感器來(lái)采集數(shù)據(jù),并能在人群中行走,同時(shí)提供了車輪編碼器odometry里程計(jì)數(shù)據(jù)。參賽團(tuán)隊(duì)在S1原有的定位算法框架下,融合了深度學(xué)習(xí)的特征匹配和場(chǎng)景重定位,使機(jī)器人通過(guò)視覺(jué)進(jìn)行持續(xù)自我定位的能力大大提高,綜合評(píng)估分?jǐn)?shù)第一。 S1算法框架融合的多傳感器信息,包括魚眼相機(jī)、慣性測(cè)量器件以及底盤編碼器,使定位算法更加穩(wěn)定。同時(shí),通過(guò)不斷的優(yōu)化地圖和合并地圖增加視覺(jué)感知的范圍,提高機(jī)器人的重新定位(Relocalization)的概率。通過(guò)比賽,驗(yàn)證了S1算法的實(shí)時(shí)定位性能, 以及在大規(guī)模室內(nèi)環(huán)境中建立一致地圖的能力。 IROS成立于1988年,每年舉辦一次,目前已經(jīng)舉辦了32屆,在機(jī)器人領(lǐng)域極具影響力,堪稱機(jī)器人和智能系統(tǒng)領(lǐng)域最著名、影響力最大的頂級(jí)年度會(huì)議。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29498瀏覽量
211570 -
人工智能
+關(guān)注
關(guān)注
1804文章
48717瀏覽量
246537
原文標(biāo)題:九號(hào)機(jī)器人Segway Robotics團(tuán)隊(duì)榮獲IROS 2019 SLAM挑戰(zhàn)賽冠軍
文章出處:【微信號(hào):robotmagazine,微信公眾號(hào):機(jī)器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
e絡(luò)盟社區(qū)聯(lián)合 TDK 發(fā)起超聲波傳感器挑戰(zhàn)賽

平頭哥半導(dǎo)體亮相AICAS 2025挑戰(zhàn)賽技術(shù)研討會(huì)
微軟AI開(kāi)發(fā)者挑戰(zhàn)賽即將開(kāi)啟
優(yōu)秀獎(jiǎng)及決賽陣容震撼公布 第二屆OpenHarmony創(chuàng)新應(yīng)用挑戰(zhàn)賽決戰(zhàn)在即

芯華章持續(xù)助力EDA精英挑戰(zhàn)賽
EDA精英挑戰(zhàn)賽賽果公布!思爾芯“戰(zhàn)隊(duì)”薪火相承斬獲“麒麟杯”

e絡(luò)盟社區(qū)攜手恩智浦發(fā)起智能空間樓宇自動(dòng)化挑戰(zhàn)賽

冠軍說(shuō)|第二屆OpenHarmony競(jìng)賽訓(xùn)練營(yíng)冠軍團(tuán)隊(duì)專訪
2024年ICPC與華為挑戰(zhàn)賽冠軍杯圓滿落幕
PI助力aCentauri車隊(duì)在太陽(yáng)能車挑戰(zhàn)賽中大放異彩
50萬(wàn)獎(jiǎng)金池!開(kāi)放原子大賽——第二屆OpenHarmony創(chuàng)新應(yīng)用挑戰(zhàn)賽正式啟動(dòng)
NVIDIA為AI城市挑戰(zhàn)賽構(gòu)建合成數(shù)據(jù)集
AI4Science黑客松光子計(jì)算挑戰(zhàn)賽成功舉辦
思爾芯賽題正式發(fā)布,邀你共戰(zhàn)EDA精英挑戰(zhàn)賽!
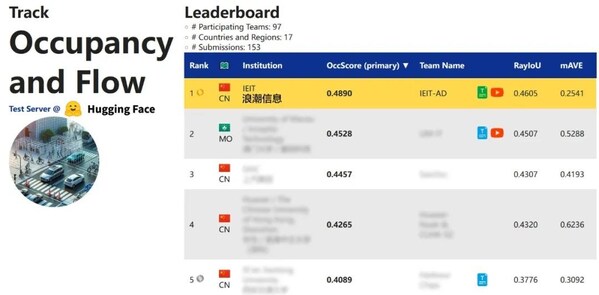
浪潮信息獲CVPR2024自動(dòng)駕駛挑戰(zhàn)賽"Occupancy& Flow"冠軍





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論