") dfrobot非接觸式紅外溫度傳感器MLX90614-DCI簡(jiǎn)介
dfrobot非接觸式紅外溫度傳感器MLX90614-DCI簡(jiǎn)介


簡(jiǎn)介
一般來(lái)說(shuō),溫度測(cè)量可分為接觸式和非接觸式,接觸式測(cè)溫只能測(cè)量被測(cè)物體與測(cè)溫傳感器達(dá)到熱平衡后的溫度,所以響應(yīng)時(shí)間長(zhǎng),且極易受環(huán)境溫度的影響;而紅外測(cè)溫是根據(jù)被測(cè)物體的紅外輻射能量來(lái)確定物體的溫度,不與被測(cè)物體接觸,不影響被測(cè)物體溫度場(chǎng),并且溫度分辨率高、響應(yīng)速度快、穩(wěn)定性好等特點(diǎn)。近年來(lái),非接觸紅外測(cè)溫在醫(yī)療,環(huán)境監(jiān)測(cè)、家庭自動(dòng)化、汽車電子、航空和軍事上得到越來(lái)越廣泛的應(yīng)用。
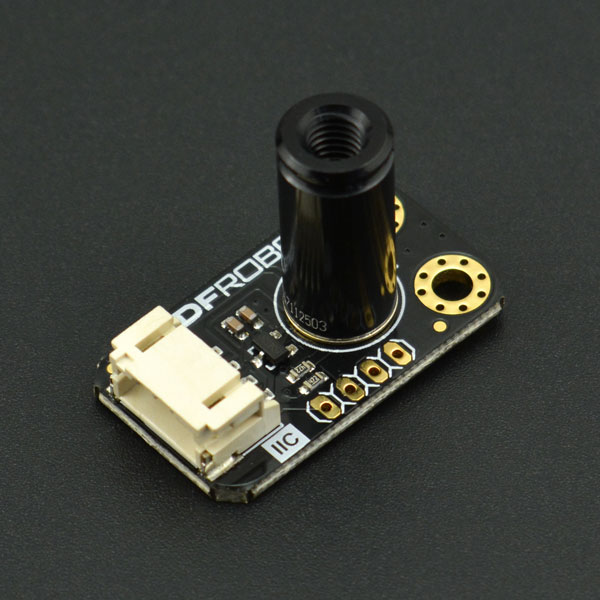
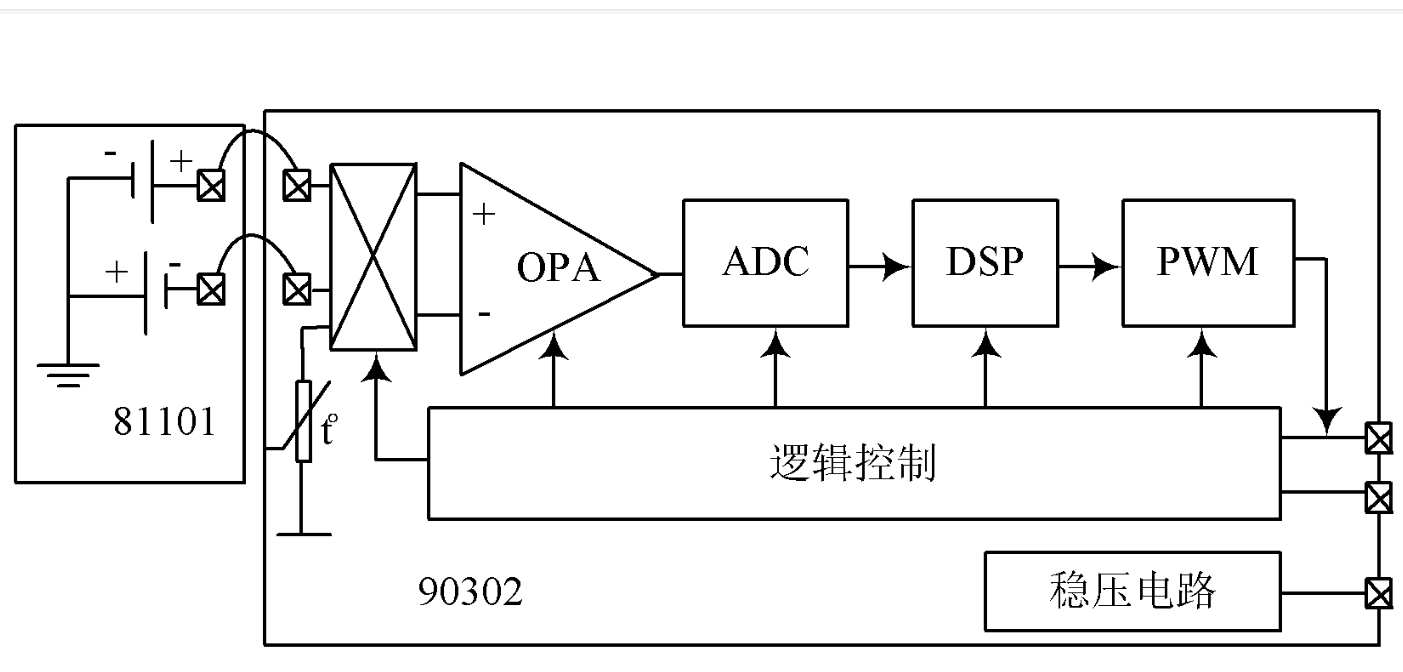
DFRobot最新推出的MLX90614紅外測(cè)溫模塊,通過(guò)探測(cè)物體紅外輻射能量的大小和波長(zhǎng)的分布來(lái)檢測(cè)物體的表面溫度。紅外測(cè)溫器由光學(xué)系統(tǒng)、光電探測(cè)器、信號(hào)放大器和信號(hào)處理及輸出等部分組成。光學(xué)系統(tǒng)匯聚其視場(chǎng)內(nèi)的目標(biāo)紅外輻射能量,視場(chǎng)的大小由測(cè)溫儀的光學(xué)零件及其位置確定。紅外能量聚焦在光電探測(cè)器上并轉(zhuǎn)變?yōu)橄鄳?yīng)的電信號(hào)。該信號(hào)經(jīng)過(guò)放大器和信號(hào)處理電路,并按照儀器內(nèi)的算法和目標(biāo)發(fā)射率校正后轉(zhuǎn)變?yōu)楸粶y(cè)目標(biāo)的溫度值。MLX90614出廠自帶校準(zhǔn),并且在信號(hào)調(diào)節(jié)芯片中使用了先進(jìn)的低噪音放大器,一枚17-bit ADC以及功能強(qiáng)大的DSP元件,從而實(shí)現(xiàn)高精度溫度測(cè)量。
SEN0263 (MLX90614-DCI) 由于其較小的視場(chǎng)(FOV=5°),更適合工業(yè)應(yīng)用中,探測(cè)距離可以更遠(yuǎn)。普通應(yīng)用中,可以使用SEN0206(MLX90614-BCC)。
技術(shù)規(guī)格
型號(hào):MLX90614-DCI
工作電壓:3.3V-5V
工作電流:1.2mA
溫度范圍:-70.01℃至+270℃,分辨率0.01℃
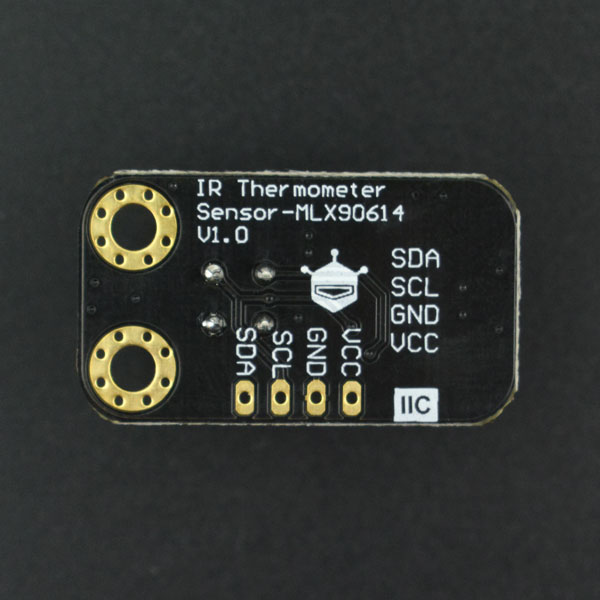
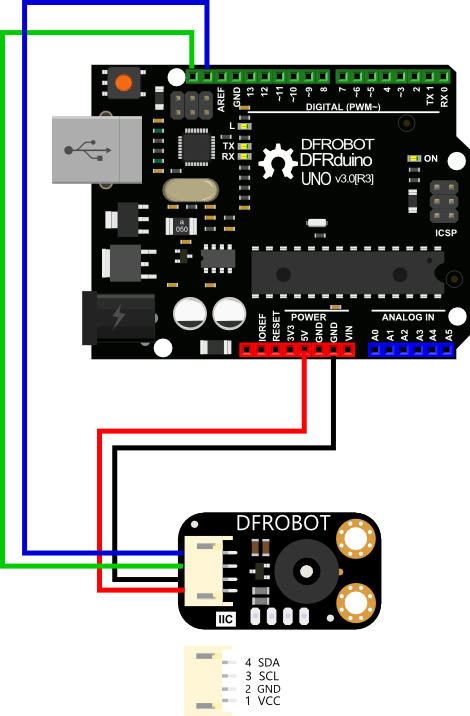
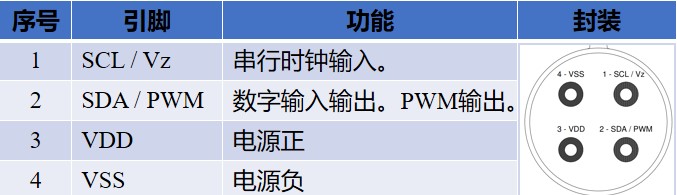
接口類型:IIC
接口線序:VCC,GND,SCL,SDA
視場(chǎng):5°
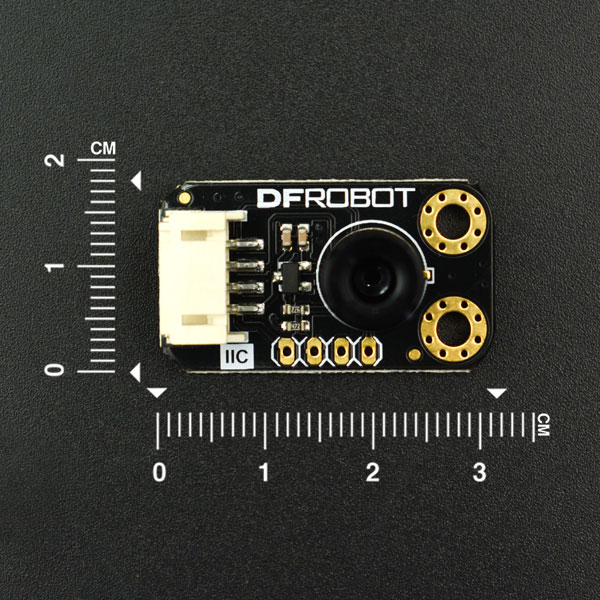
尺寸:31.5mm×18mm
重量:15g
-
嵌入式主板
+關(guān)注
關(guān)注
7文章
6096瀏覽量
36138 -
DFRobot
+關(guān)注
關(guān)注
4文章
1160瀏覽量
10534
發(fā)布評(píng)論請(qǐng)先 登錄
MLX90614紅外溫度傳感器的驅(qū)動(dòng)設(shè)計(jì)與實(shí)現(xiàn)
基于MLX90614的非接觸式體溫測(cè)量系統(tǒng)設(shè)計(jì)
最佳FOV角度的單點(diǎn)紅外溫度傳感器如何選擇
mlx90614進(jìn)行紅外測(cè)溫的方法
如何實(shí)現(xiàn)GY-906 MLX90614ESF非接觸式紅外測(cè)溫模塊電路設(shè)計(jì)?
基于Arduino的非接觸式紅外溫度傳感器
MLX90614數(shù)字非接觸式紅外溫度計(jì)的驅(qū)動(dòng)程序免費(fèi)下載
MLX90614ESF紅外非接觸溫度測(cè)量傳感器模塊的程序和工程文件免費(fèi)下載



溫度傳感器MLX90614的STM32驅(qū)動(dòng)實(shí)現(xiàn)

使用mlx90614 ir進(jìn)行非接觸式溫度測(cè)量





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論