") A842擺臂電機擺動的程序步驟
A842擺臂電機擺動的程序步驟

O_KS1_M1=842 -A842銑刀旋轉(zhuǎn)-
-手動控制運轉(zhuǎn)-
IF $OUT[O_R_Hand] AND NOT $OUT[O_R_Proz_akt] AND $OUT[O_KS1_Schw] THEN
-機器人手動A11-A4039工具進程激活-A3969擺臂電機啟動通過“鉗工具”
-$PRO_ACT $OUT[4039]工具進程激活
DEF_ZANGE[25]={TYP 0,A_AUF3969,A_ZU 0,E_AUF 842,E_ZU 843,A_NAME_AUF[] "KS1Ruhestellung",A_NAME_KLEM1[] "KS1",A_NAME_ZU[] "nichtbelegt",A_NAME_KLEM2[] "nicht belegt",E_NAME_KLEM1[] "KS1Ruhestellug",E_NAME_KLEM2[] "KS1 Arbeitsstellung"}
-鉗號25-控制點A3969-輸出類型一直有,TYP 0-名稱:"KS1 Arbeitsstellung"
$OUT[O_KS1_KYP3V] = TRUE-A835沒有使用
$OUT[O_KS1_M1] =($IN[I_KS1_BE_3V] OR NOT $FLAG[F_o_Ausgl])
-A842擺臂轉(zhuǎn)動-E835沒有使用-!F564沒有使用
-直接發(fā)出A842電機擺動
ENDIF
-關(guān)閉-
GLOBALINTERRUPTDECL 2 WHEN $IN[I_KS1_Ruhe] == FALSE DOKS_Abschalten()
-當(dāng)E844沒有時關(guān)閉擺臂電機,E844(常閉觸點當(dāng)?shù)缴斐鑫恢脮r,E844=FALSE)
GLOBALINTERRUPTDECL 3 WHEN $IN[I_KS1_Arbeit] == FALSE DOKS_Abschalten()
-當(dāng)E845沒有時關(guān)閉擺臂電機,E845(常閉觸點當(dāng)?shù)椒祷匚恢脮r,E845= FALSE)
.........
GLOBALDEFKS_Abschalten()
關(guān)閉擺臂電機
$OUT[O_KS1_KYP3V] = FALSE
$OUT[O_KS1_M1] = FALSE-A842電機旋轉(zhuǎn)-
$OUT[O_KS1_Schw] = FALSE
-
電機
+關(guān)注
關(guān)注
143文章
9298瀏覽量
149457 -
銑刀
+關(guān)注
關(guān)注
0文章
10瀏覽量
6495
原文標題:固定焊鉗擺臂銑刀的擺臂電機控制A842
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
2011全國大學(xué)生電子設(shè)計競賽B題基于自由擺的平板控制系統(tǒng)
2013年全國大學(xué)生電子設(shè)計競賽 簡易旋轉(zhuǎn)倒立擺及控制裝置
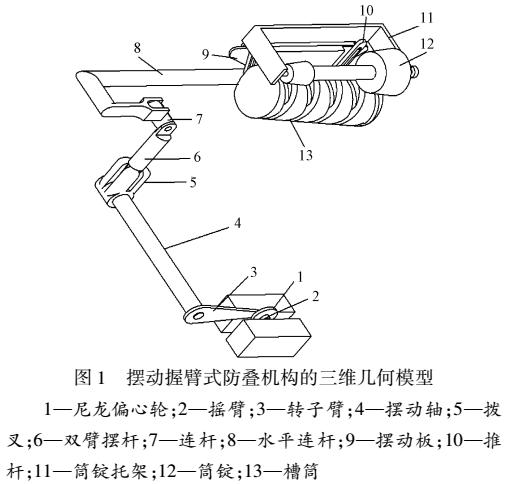
擺動握臂式防疊機構(gòu)模態(tài)分析
STC90C51單片機在倒立擺控制系統(tǒng)中的應(yīng)用

簡述擺臂涂膠桶STEP控制的一些感悟






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論