") 如何使用arduino為Led Strip構(gòu)建驅(qū)動程序
如何使用arduino為Led Strip構(gòu)建驅(qū)動程序

步驟1:
對于此項目,您將需要:
-Arduino UNO
-電位計
-TIP120或其他能夠驅(qū)動高功率的組件
-2k電阻器
步驟2:理論
LED將根據(jù)提供給它的電壓來改變其亮度。問題在于,通常便宜的直流電源在此項目為12V的情況下通常是恒定的,它們可以提供恒定的電壓。
因此,要解決此問題,我們必須制作自己的電路來調(diào)節(jié)電壓輸出,使用PWM(脈沖寬度調(diào)制)。 PWM通過非常快速地接通和斷開電壓來工作,具體取決于接通時間與接通時間之間的比率,我們可以得到0V至12V的平均輸出電壓。
步驟3:電路
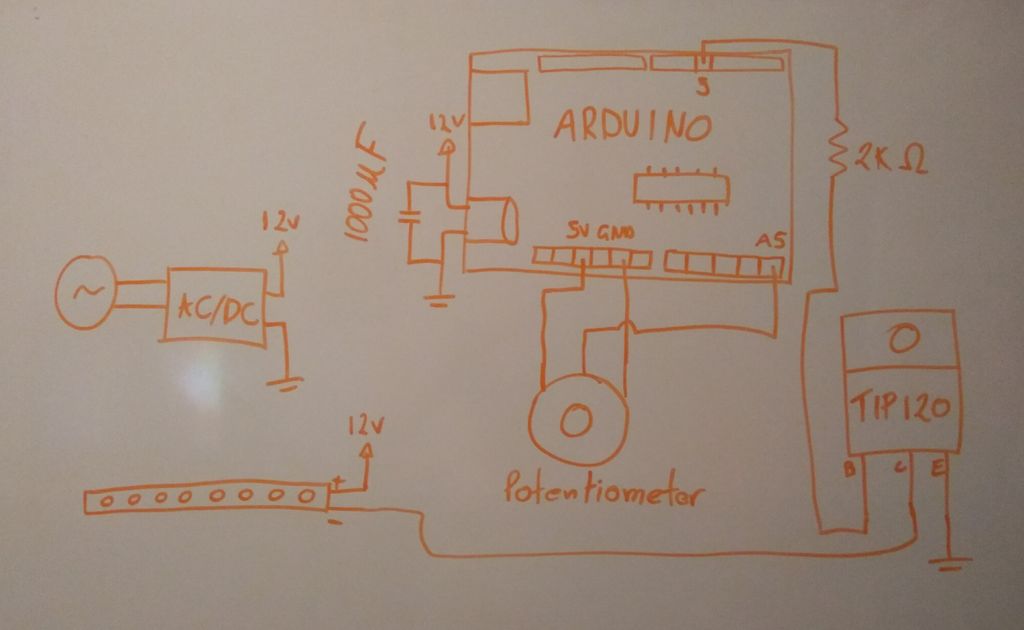
為此電路,我使用相同的電源為Arduino和LED Strip供電,因為我使用的是Arduino可以用7V到12V之間的電壓為Arduino供電的電源插孔。
再次檢查您的電源連接器的極性是否與Arduino的連接器的極性相同,且其正極在中間,如下圖所示。
電位計連接到Arduino的模擬輸入,以調(diào)節(jié)到TIP120功率晶體管的PWM輸出的電平(通過軟件)。
步驟4:最終組裝
在圖像中您可以看到最終組裝,我將平滑的PWM信號直接焊接到電容器的電源插孔,還焊接了正極連接器(暴露在t中(將連接器的背面)直接連接到LED燈條的正極輸入,將接地連接器(暴露在連接器的側(cè)面)連接到我制作的板子的接地。
電路原理圖,但在最終組裝中,我在TIP120的連接器(中間引腳)和LED燈帶的負(fù)極端子之間放置了一個開關(guān),以在關(guān)閉電源時完全切斷LED燈帶的電源。
第5步:代碼
代碼非常簡單,易于解釋。
步驟6:最終考慮事項
這是我記錄的第一個項目,但我打算編寫許多我喜歡做的項目的指南。
-
led
+關(guān)注
關(guān)注
242文章
23842瀏覽量
673978 -
Arduino
+關(guān)注
關(guān)注
190文章
6498瀏覽量
192137
發(fā)布評論請先 登錄
Linux環(huán)境再升級:PLIN驅(qū)動程序正式發(fā)布

使用Mickledore生成BSP,移動到最新版本的Scarthgap v6.6.52時,驅(qū)動程序未構(gòu)建,怎么解決?
AN3761-KSZ DSA驅(qū)動程序的使用

pcie設(shè)備驅(qū)動程序安裝步驟
TSC2003 WinCE 5.0驅(qū)動程序
硬盤電機(jī)怎么驅(qū)動程序?它有什么典型特征?
LSP 2.10 DaVinci Linux驅(qū)動程序





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論