 自動機水族館的制作圖解
自動機水族館的制作圖解

步驟1:創建Fish
魚代表該系統的一些組件中的第一個組件
步驟中進行描述2:水母的構建
步驟3:伺服修改
我們在https://www.instructables.com上概述了用于該水族館的亞微伺服系統的修改過程。/id/Sub-Micro-Continuous-Rotation-Servo-Modification/,重點關注具有成本效益的Hitec HS-55模型。
第4步:創建定位系統
我們在https://www.instructables.com/id/Laser-Cut-Wooden-4-Axis-Positin中描述了生產和組裝四自由度木質定位系統的過程G-系統/。我們還保證,盲目鏈接到我們的其他教學人員將很快停止。
步驟5:創建木制框架
可以構造木制框架以適合您的特定參數。但是,我們建議為定位系統提供一個較大的下部隔間,并為隱藏水母提供一個上部隔間。我們在上層隔室上貼了蠟紙,但任何不透明或半透明的東西都可以。
步驟6:添加光傳感器
我們將光傳感器安裝在框架的頂部,并將其長電線沿框架的內側向下布線,以免引起旁觀者的隨意目光。為方便起見,我們在面包板上連接了10K電阻器,但它也可以包含在上面。
步驟7:安裝水母
切出大約半個木頭圈。直徑3英寸,并將其連接到伺服器上。將此伺服器安裝在框架的頂部邊緣之一上。將熱膠粘在每個水母頂部約16英寸的釣線上。在框架頂部附加一塊長木頭,并在中心鉆一個孔。在這個十字形的底部,在水母將懸掛的每個位置上,擰一個眼鉤。從水母上穿過魚鉤勾勒出魚線,然后從木頭中心的孔中向上劃出一條線。將水母放到所需的高度,然后將所有釣魚線結在一起。將一條較長的釣魚線綁在該結上,將其拉緊,然后將其粘貼到舵機的半輪上。如果需要,可以在頂部添加更多的吊鉤,以將釣魚線引至伺服輪。
步驟8:接線
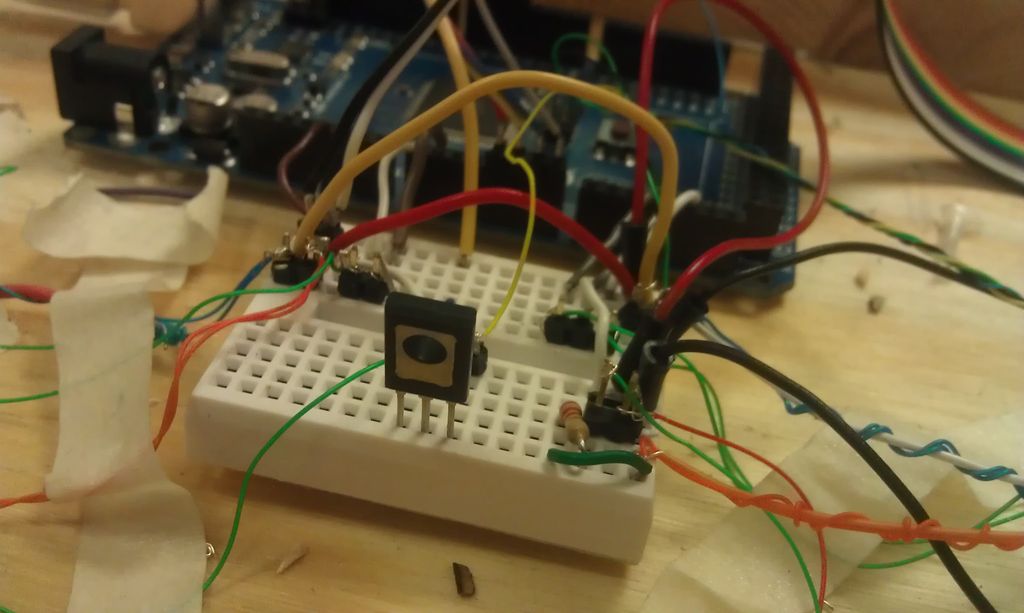
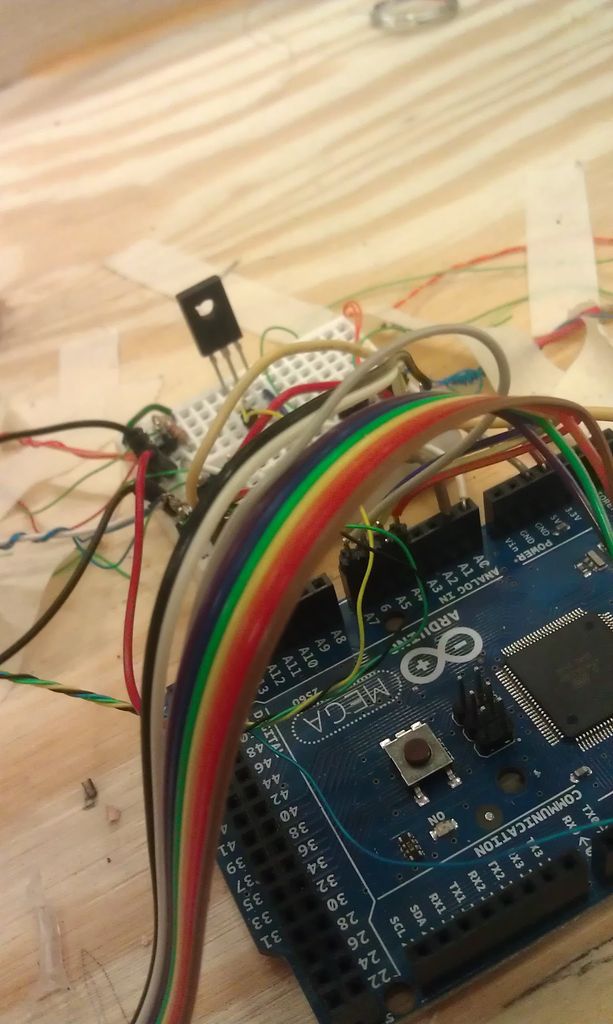
我們在一個3D定位系統的底部放置了一塊帶有一塊小型面包板的Arduino Mega,通過跳線和Mega的5V端口可以輕松實現功率分配設置。誠然,此步驟有些麻煩,但是使用默認代碼將使用以下引腳分配:
AIN引腳12上的光傳感器
數字線路4上x伺服的控制線
電位器反饋AIN引腳4上的x伺服的控制線
數字線5上的y伺服的控制線
AIN引腳5上的y伺服的電位反饋線
數字線6上的z伺服控制線AIN引腳6上z伺服的電位器反饋線
//數字線7上theta伺服的控制線(在股票代碼中禁用。..請參閱代碼步驟)
//AIN上theta伺服的電位器反饋線引腳7(禁用股票代碼。..。參見代碼步驟)
數字線路9上的水母伺服控制線
數字線路12上的水母LED控制
您會注意到,水母中的LED需要額外一點“ ump”并需要MOSFET。因此,如下圖所示,信號輸入連接到柵極,電源連接到源極,信號輸出到漏極。信號輸出通過LED接地。
步驟9:設置邏輯
我們的代碼當前托管在https://github.com/Samnsparky/AutomataAquarium。不幸的是,由于在伺服器靜止不動時電阻電阻的微小差異會改變發送到外圍設備的值,因此對于伺服器有一個校準步驟。因此,在接線后,您將需要取消注釋第34、36和38行的第一次運行,然后再注釋掉它們。這僅運行診斷程序并將結果保存到EEPROM。這些校準值將繼續用于以后的迭代(或至少在您清除EEPROM之前)。默認行為是使魚向前擺動,并在環境黑暗時使其停止,從而使水母掉落并照亮。但是,可以通過更改theaquarium_onFishReachedGoal函數來更改此行為。就是這樣!試試看,并告訴我們它如何進行。
-
伺服
+關注
關注
16文章
669瀏覽量
41840 -
光傳感器
+關注
關注
3文章
176瀏覽量
30442
發布評論請先 登錄

圖解單片機功能與應用(完整版)
LITESTAR 4D應用:室內博物館照明案例

從傳統到互動:樹莓派如何重塑博物館體驗?

漫畫圖解 電感器 抗干擾元器件指南(全彩PDF版)
松下影像制作方案分享會成功舉辦
PCB封裝圖解
貿澤電子開售ADI邊緣計算平臺,助力自動機器人機器視覺
LITESTAR 4D應用:室內博物館照明案例
探索AC自動機:多關鍵詞搜索的原理與應用案例
虹科免拆診斷 | 2017款路虎發現5車行駛中發動機自動熄火






 工商網監
工商網監
評論