") 如何將標(biāo)準(zhǔn)的遠(yuǎn)程控制車變成自主漫游車
如何將標(biāo)準(zhǔn)的遠(yuǎn)程控制車變成自主漫游車

步驟1:刪除,重新定位,重新設(shè)計(jì)
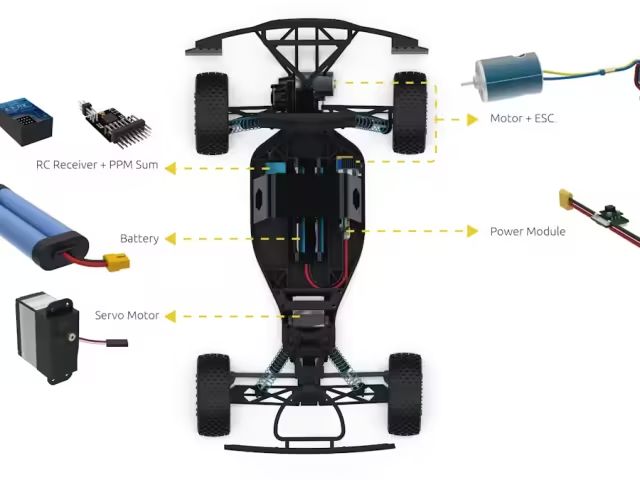
基本機(jī)箱看起來(lái)與第一個(gè)圖像相似。卸下ESC,下面的黑色ESC支架和防水接收器盒進(jìn)行修改。
下一個(gè)圖像顯示了電池條,請(qǐng)使用Traxxas卸下電池條。卡車隨附的4向扳手。理想情況下,最好將這些接線柱固定在電池上,但我們需要使用孔來(lái)固定要添加的電子產(chǎn)品。
將Dremel與砂輪一起使用,在研磨盤上切四個(gè)槽電池倉(cāng)的側(cè)面,如第三幅圖所示。確保從托架外部進(jìn)行切割,以確保插槽位于機(jī)箱頂部上方,因?yàn)殡姵赝屑艿牡撞康陀谕屑芡獠繖C(jī)箱的頂部。
完成插槽后,應(yīng)該看起來(lái)像第四張圖片。
將魔術(shù)貼電池帶穿過(guò)插槽,如第五張圖片所示。
使用雙面膠帶將ESC固定在電池槽的側(cè)面。除非您確定ESC的更好位置,否則這將需要您在側(cè)面切割螺絲孔。您可以根據(jù)需要使用Velcro使其輕松移動(dòng)。
一旦安裝了ESC,請(qǐng)安裝電池以確保正確安裝,如第六幅圖所示。
下一步,卸下電池。防水接收器盒中的ESC和伺服線。使用四個(gè)母對(duì)母伺服連接器并將它們連接到通道1-4。當(dāng)您連接所有設(shè)備時(shí),這將是非常緊密的配合,并且您將需要確保在外部標(biāo)記端部,從而不必弄清楚哪個(gè)是哪個(gè)。它的外觀應(yīng)類似于第七張圖像。
完成后,將防水接收器盒再次安裝到存放位置。至此,您的設(shè)置應(yīng)該看起來(lái)像第八張圖像。
步驟2:剪切,鉆孔,安裝
現(xiàn)在是大多數(shù)
拿一塊8x10英寸的有機(jī)玻璃,切成8 x 3英寸的一塊。如第一幅圖像所示,可以使用標(biāo)尺和箱刀輕松地完成此操作。沿著標(biāo)尺對(duì)有機(jī)玻璃劃痕幾次,直到您在有機(jī)玻璃上找到一個(gè)好的凹槽。然后沿著那條線將工作表靠在工作臺(tái)或工作臺(tái)的邊緣上,然后將其從其余部分卡緊。只要您正確打分,它就可以毫無(wú)問(wèn)題地脫離。您將得到一塊看起來(lái)像第二張圖像的作品。
使用在上一節(jié)中卸下的ESC板,將其放在有機(jī)玻璃的一端,并在四個(gè)外孔上打上標(biāo)記,以得到如第三個(gè)圖像所示,為每個(gè)孔設(shè)置合適的鉆孔位置,然后再鉆每個(gè)孔。
在事實(shí)之后,我了解到的一個(gè)提示是,如果在有機(jī)玻璃的兩面都使用一塊木頭,它幾乎不會(huì)裂開鉆孔時(shí)一樣容易。我建議使用夾具將有機(jī)玻璃夾在木材之間,然后使用ESC板獲得孔圖案,并以較高的速度直通木材和有機(jī)玻璃,以防止其破裂。
完成后,將有機(jī)玻璃孔與ESC支架連接到機(jī)箱的孔對(duì)齊。在薄板的另一端,標(biāo)記需要鉆孔的位置,將其移到電池桿柱過(guò)去的位置,然后再鉆孔。您可以在第四個(gè)圖像中獲得基本思想。除非您希望它破裂,否則不要像圖像中顯示的那樣鉆取它!只需標(biāo)記出孔的位置,然后使用上面提到的木質(zhì)尖端即可。
現(xiàn)在,所有孔均已鉆好,將螺栓穿過(guò)有機(jī)玻璃和ESC固定架,如第五幅圖所示。
除非您找到所有合適長(zhǎng)度的墊片,您可能必須將其切成1/2英寸。我只是使用了一些剪線鉗,它的效果還不錯(cuò),您可以獲得額外的好處,因?yàn)槟F(xiàn)在可以將其擰緊到螺栓,當(dāng)您稍后安裝所有組件時(shí),它們將螺栓固定在不脫落的位置上。完成此部分后,其外觀應(yīng)類似于第六幅圖像。請(qǐng)記住,在我的構(gòu)建中,我在這里只使用了三個(gè)螺栓,因?yàn)槲以谝郧暗男薷闹校业臋C(jī)箱沒(méi)有第四個(gè)孔。大多數(shù)Traxxas Rustler機(jī)箱的四個(gè)孔都可以用螺栓固定。
使用3/4英寸的墊片在前端進(jìn)行相同的操作,如第七個(gè)所示圖片。
如果測(cè)量正確,一切都應(yīng)該對(duì)齊(第七和第八張圖片),如果這樣,則擰緊所有六個(gè)螺栓可以使用2.5毫米六角扳手。
完成此部分后,卡車的外觀應(yīng)類似于第九張圖像。
步驟3:自動(dòng)駕駛儀連接
根據(jù)需要布置APM,GPS和遙測(cè)模塊,并使用雙面膠帶將其固定在適當(dāng)?shù)奈恢茫鐖D所示。第一張圖片。我將APM放置在新創(chuàng)建的平臺(tái)的中間,以使其與伺服器和電機(jī)保持距離,以保持磁力計(jì)讀數(shù)盡可能準(zhǔn)確。
第二張圖顯示了連接接收器電纜的正確方法
Rx Ch 1-》 APM輸入Ch 1
Rx Ch 2-》 APM輸入Ch 3
Rx Ch 3-》 APM輸入Ch 7
Rx Ch 4-》 APM輸入Ch 8
重要!
將需要通過(guò)從連接器上移除紅色導(dǎo)線來(lái)修改ESC連接器。可以通過(guò)提起塑料卡舌并拉出紅色導(dǎo)線來(lái)完成。之所以必須這樣做,是因?yàn)門raxxas ESC BEC輸出的電壓為6V,這會(huì)破壞APM。將電纜從連接器中拔出后,可以使用電工膠帶將其綁扎回去,這是首選方法,如果將來(lái)不需要使用,可以將其切斷。
開發(fā)板將通過(guò)以下方式供電:外部BEC,并且可以插入通道1或3之外的任何APM輸出。請(qǐng)確保將外部BEC設(shè)置為輸出5V,而未將其設(shè)置為6V。
這時(shí),還應(yīng)確保J1 APM上有跳線,因此外部BEC將為電路板和卡車電子設(shè)備供電。如果您使用兩個(gè)單獨(dú)的電源(更高級(jí)),或者將3DR電源模塊與其他ESC一起使用,則您將不使用J1跳線,而需要將其卸下。
ESC(紅色電纜被拔下)連接到APM輸出的通道3。伺服分機(jī)連接到APM輸出的通道1,電纜的另一端應(yīng)連接到伺服。如果電纜由于您的放置而到達(dá),則不需要擴(kuò)展。這些連接顯示在第三張圖片中。
看第二張圖片,您會(huì)看到我從接收器到APM的電纜太短,因此我在零件清單中指定了更長(zhǎng)的電纜,但這些長(zhǎng)度僅當(dāng)您以如圖所示的方式安裝時(shí)才適用。如果要沿卡車的軸線安裝APM,則需要更長(zhǎng)的電纜。
一旦完成安裝和連接,就完成了構(gòu)建!然后添加您自己的攝像頭以?shī)蕵?lè),并觀察流動(dòng)站如何自行導(dǎo)航!
第4步:任務(wù)計(jì)劃程序和參數(shù)設(shè)置
此部分是必填項(xiàng),只是快速入門。您也可以從http://rover.ardupilot.com/獲得所有詳細(xì)信息,因?yàn)樗鼜氐祝皇窃揑nstructable的目標(biāo),盡管基礎(chǔ)知識(shí)可以助您一臂之力。
下載Mission Planner(MP )來(lái)自http://ardupilot.com/downloads/?category=4的MSI或ZIP文件,然后安裝該程序。該程序?qū)⒂糜趯⒐碳虞d到APM上,并且在第一張圖像中可以看到主屏幕。
注意:僅適用于Windows系統(tǒng)。
一旦安裝了該程序,將APM連接到使用計(jì)算機(jī)附帶的USB電纜連接計(jì)算機(jī)。單擊ArduRover v2.42(或閱讀此Instructionable時(shí)最新的版本)圖標(biāo),它將把固件加載到APM。如果不是,則可能是您的計(jì)算機(jī)無(wú)法識(shí)別APM。從獲得MP的網(wǎng)站上安裝USB驅(qū)動(dòng)程序,然后再試。
固件正確加載后,您應(yīng)該通過(guò)計(jì)劃程序連接到APM。可以通過(guò)將其通過(guò)USB電纜插入或使用遙測(cè)模塊并通過(guò)其進(jìn)行連接來(lái)完成。確保在MP的右上角選擇正確的COM端口,將波特率保持在115200,然后單擊“連接”。首先,它可能會(huì)查找MavLink消息,然后將開始加載參數(shù)。
在MP的左側(cè),您需要單擊“標(biāo)準(zhǔn)參數(shù)”,然后對(duì)ArduRover Pid計(jì)時(shí)。有關(guān)卡車上使用的值,請(qǐng)參見第二張圖像。它工作得很好,并且應(yīng)該給您一個(gè)開始,盡管如果參數(shù)對(duì)于您的卡車不是最佳的,您以后可能需要自己調(diào)整參數(shù)。復(fù)制完值后,請(qǐng)務(wù)必單擊底部的“ Write Params”,否則它將保留庫(kù)存參數(shù)。
有關(guān)可能調(diào)整的所有參數(shù)的詳細(xì)說(shuō)明,請(qǐng)單擊“高級(jí)”。參數(shù)”,然后是“高級(jí)參數(shù)列表”,然后您將看到變量的描述。有些可能沒(méi)有描述,但參數(shù)名稱本身可以很好地說(shuō)明其功能。
設(shè)置完參數(shù)后,請(qǐng)務(wù)必先運(yùn)行無(wú)線電校準(zhǔn),然后再執(zhí)行其他操作,并在第三個(gè)頻道上設(shè)置適當(dāng)?shù)哪J健?/p>
有關(guān)MP設(shè)置的其他詳細(xì)信息,APM:Rover指南在掌握基礎(chǔ)知識(shí)方面做得很好。同樣,可以在http://rover.ardupilot.com/上找到它,并且要求至少進(jìn)行一次無(wú)線電校準(zhǔn),然后將您設(shè)置為進(jìn)行。
責(zé)任編輯:wv
-
ESC
+關(guān)注
關(guān)注
0文章
63瀏覽量
17885 -
遙控車
+關(guān)注
關(guān)注
9文章
82瀏覽量
24471
發(fā)布評(píng)論請(qǐng)先 登錄
用 樹莓派 Zero 打造的智能漫游車!
如何使用無(wú)線遠(yuǎn)程控制模塊來(lái)實(shí)現(xiàn)rs-485無(wú)線控制?

普源示波器遠(yuǎn)程控制SCPI指令的應(yīng)用

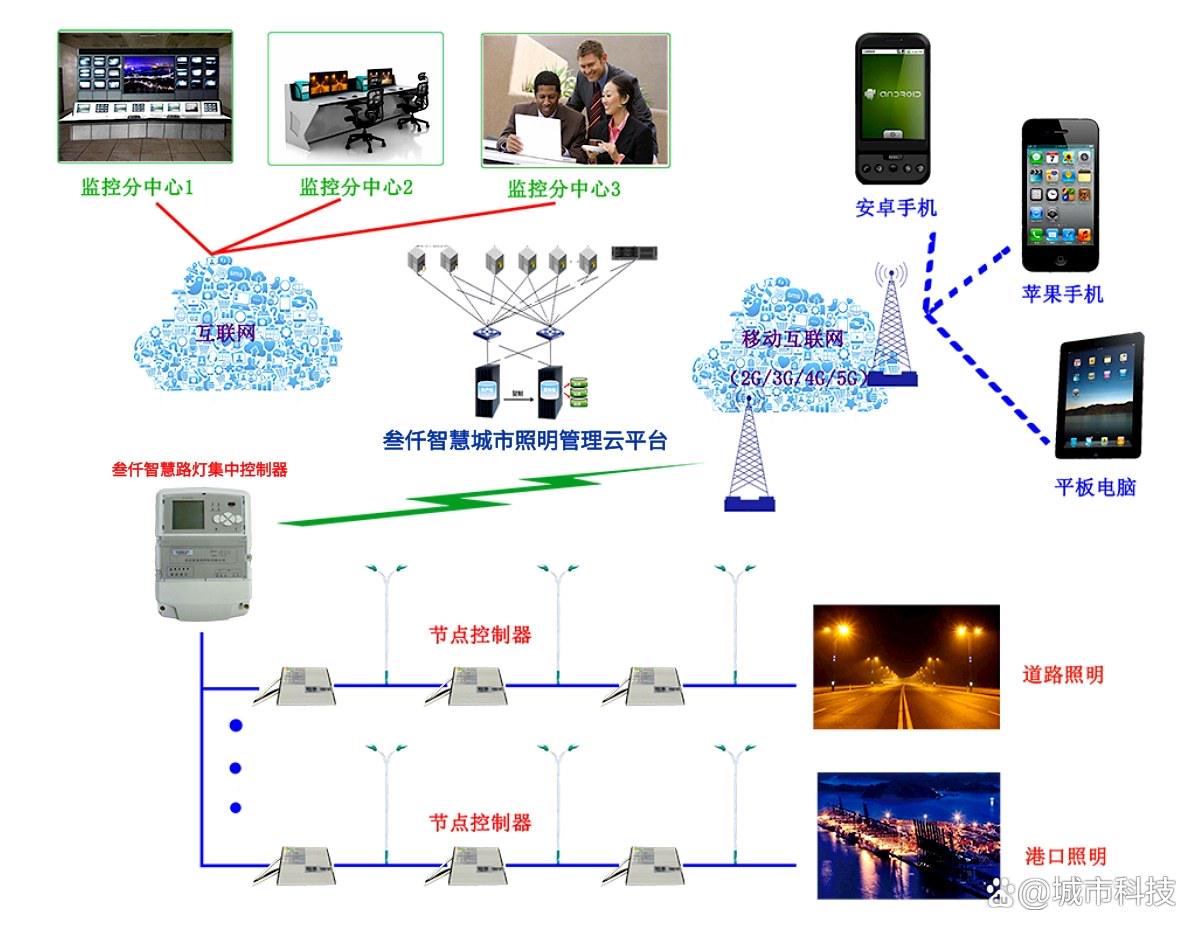
智慧路燈如何實(shí)現(xiàn)遠(yuǎn)程控制?
plc遠(yuǎn)程控制模塊是什么
PLC遠(yuǎn)程控制模塊應(yīng)用
車云遠(yuǎn)程診斷系統(tǒng) - DRS

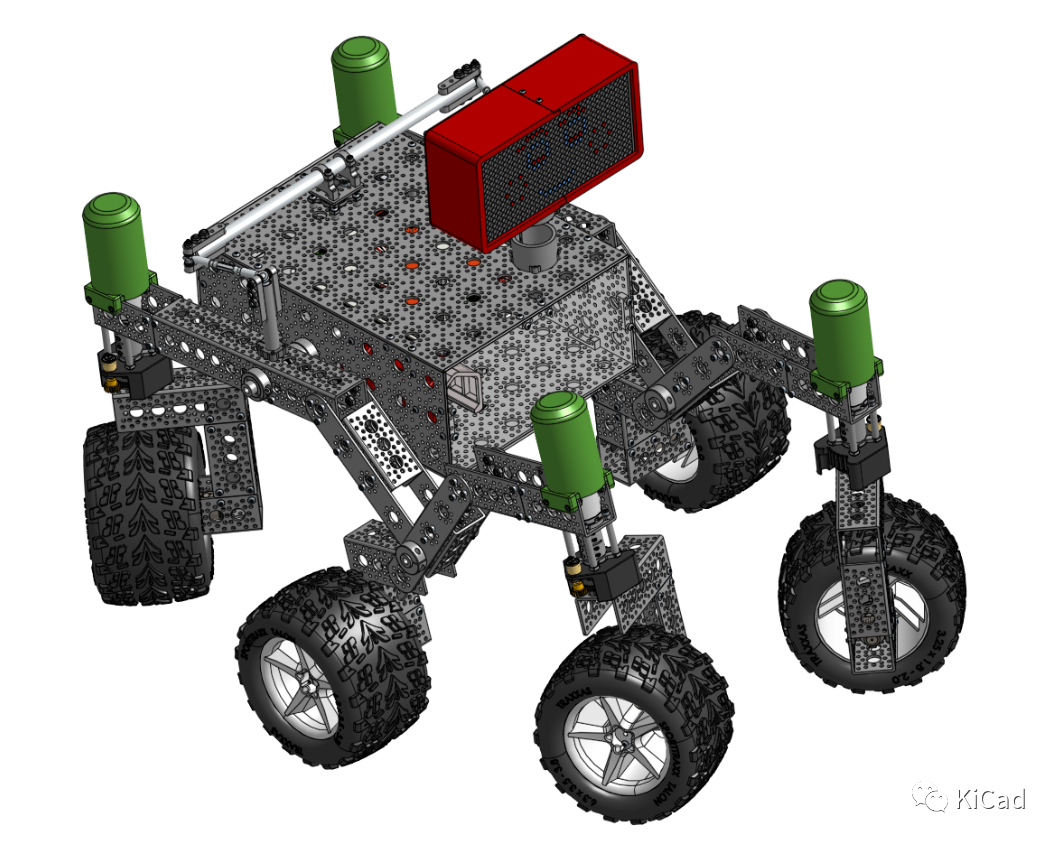
Made with KiCad(十二):JPL開源漫游車
使用樹莓派實(shí)現(xiàn)遠(yuǎn)程控制的技巧
遠(yuǎn)程控制溫控器的應(yīng)用
用網(wǎng)頁(yè)端遠(yuǎn)程控制電腦各工具對(duì)比
風(fēng)管遠(yuǎn)程控制系統(tǒng)應(yīng)用方案
普通空開怎樣遠(yuǎn)程控制斷電
android 遠(yuǎn)程控制如何實(shí)現(xiàn)

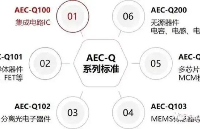
如何辨別符合車規(guī)級(jí)標(biāo)準(zhǔn)的電子元器件?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論