 ARDUINO飛行控制器DIY圖解
ARDUINO飛行控制器DIY圖解
步驟1:零件和材料
3年前我開始使用arduino時,我想我已經堆積了現在,一些額外的傳感器(例如MPU6050,BMP180和HMC5883L)讓我感到沮喪ld我的四軸飛行器的飛行控制器我決定自己制作類似于MULTIWII“ CRIUS SE”的控制器
所以這是主要部分
一個 Arduino mini 》 。..。或類似的東西,例如從我們在菲律賓當地的電子產品商店獨家購買的
我僅以22.31 $的價格獲得了這些傳感器! 16年3月15日更新?“如今便宜得多”
1x MPU6050
1xBMP180或085
1x HMC5883L
- -10 DOF IMUMPU6050 + HMC5883L + MS5611 -----最佳價格?
_______________________________
1個藍牙模塊HC 05或HC02
2x排針1x40
1x預合成PCB 6x6cm
很多母對母線?
用于PCB制造的工具和化學品
微型鉆
1mm鉆頭
氯化鐵
開發人員解決方案
嬰兒油
曝光燈或10W熒光燈
2個小的玻璃板“透視”
2x足夠大的容器PCB和化學藥品
步驟2:了解連接
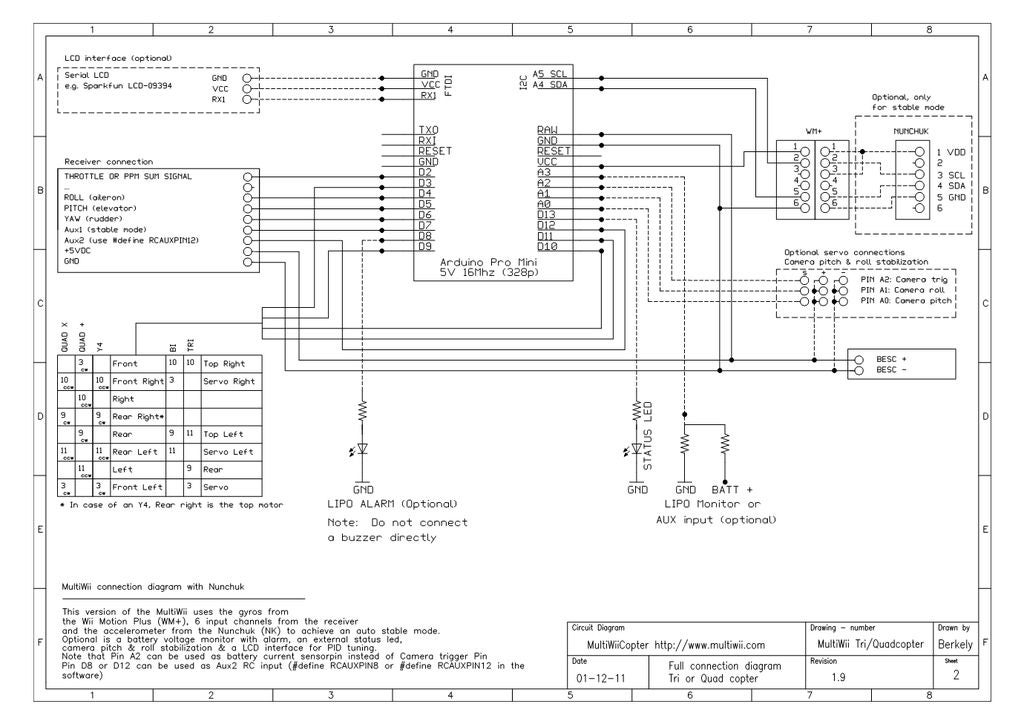
用于啟用傳感器通信的重要引腳 I2C引腳“ A4 asSDA”和A5作為“ SCL”
As連接傳感器時,需要連接每個引腳到arduino mini上的同一引腳
示例“傳感器SDA”到“ ARduino SDA A4” 。..然后將傳感器SCL到Arduino SCL
容易嗎?請記住,所有傳感器必須將其所有SDA和SCL引腳連接到arduino mini上的正確端子
______________________________________________________________________________
要啟用電機?
D3用于第一電機
D10用于第二電機
D9用于第三電機
和D11用于第四電機
______________________________________________________________________________________________
啟用控制器輸入
THR D2
(ROLL)AIL D4
(俯仰)ELE D5
(偏航)RUD D6
AUX1 D7
AUX2 D12(可選)
______________________________________________________________________________
電源?
請勿使用7805穩壓器。使用5V UBEC
UBEC是一種高效的穩壓器,可以處理超過7805個
連接+和-連接到arduino板上的相應端子。
步驟3:如果需要,重新設計PCB
如果您使用的是Legit Arduino mini cuz,請下載RaR文件并打開您的Eagle CAD,您將需要重新設計連接
如果您居住在菲律賓并且擁有相同的零件,像我一樣,隨時跳過此步驟。
注意您的MPU6050
Y軸是您的前進方向!
第4步:首先制作PCB
告訴你一個事實,這并不是構建的困難部分,只要你愿意請按照以下步驟操作。
準備以下
以高質量打印PDF
準備嬰兒油
準備預合成的PCB 6x6cm
準備一個裝有氯化鐵的容器
準備一個裝有顯影劑粉末的容器。.. 3茶匙顯影劑1杯自來水(攪拌直到粉末溶解)
準備10盞熒光燈
______________________________________________________________________________
讓我們開始吧!
1。剪掉PCB布局并涂少量的嬰兒油,然后輕輕地散布液體
2,然后輕輕擦去多余的嬰兒油。
2。準備好合成的PCB 6x6cm,去掉薄膜并放置他將打印紙的一面面向PCB的綠色面,這一點很重要。
3。獲取熒光燈并抬高至少3英寸
4。獲取Phone-》時鐘,然后計時器。..設置為5分鐘
5。將GLass板和PCB放在熒光燈下,然后立即打開時間和燈。在電話響起時,請轉動燈。
6。
7。取下玻璃杯,然后將紙張送至水槽,并用流水沖洗裸露的PCB。確保已清除油。
7。用顯影劑溶液使您的容器浸入整個PCB“銅面朝向您”并攪拌,直到墨水被清除
8。再次用水沖洗PCB,以除去其上的顯影劑溶液
9。將氯化鐵放入容器中,然后浸入PCB,直到去除不需要的銅為止。
10。 DONE!您現在要做的就是鉆孔。
第5步:PCB下一步做什么?
拿起烙鐵,開始組裝duhh。。..
步驟6:套管
現在強烈建議打印套管,因為氣壓計傳感器對諸如空氣和溫度之類的外部因素敏感。
1打印外殼
2剪一個小海綿,將其粘貼在氣壓計傳感器附近“請勿按原樣粘接氣壓計傳感器”僅在側面涂上熱膠以使海綿充當過濾器。
第7步:開始測試!
將以下內容連接到飛行控制器。 HMC5883L,TTL轉換器,也可以將導線連接到接收器模塊。
要開始初始測試,請將您的FC連接到計算機。。..Arduino mini以及MPU 6050都應該亮起,然后它就可以通過Internet下載一些東西了。
Multiwii arduino程序和Multiwii Config
以及您可能擁有的最新的ARDUINO IDE。
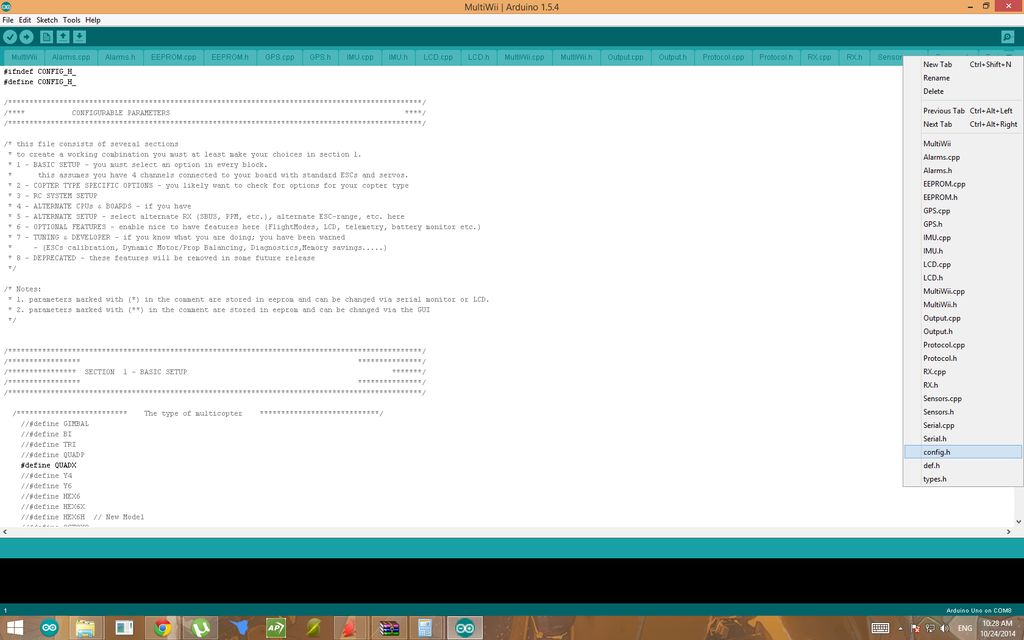
1。完成后,打開Multiwii文件夾中的Multiwii.ino,轉到arduino程序中的選項卡,然后轉到“ config.h”,這是您將開始
2的地方。向下滾動,然后從//#define QUADX轉到“ #define QUADX only”,刪除“//”,取消對行
3的注釋。向下滾動并取消注釋#define MINTHROTTLE 1064(如果您正在使用SimonK ESC),并將//添加到默認設置#define MINTHROTTLE 1150////(*)(**)
4。向下滾動#define MAXTHROTTLE 2000
5。 #定義I2C_SPEED 400000L
6。組合的IMU板-》取消注釋//#define GY_521到#define GY_521
7向下滾動I2C氣壓計,并取消注釋//#define BMP085到#define BMP085
8。 I2C磁力計取消注釋//##定義HMC5883到#define HMC5883
9。完成后,轉到左上角的Arduino工具-》板-》 Duemilanove或UNO取決于您的arduino MCU。
10。單擊工具,然后設置連接飛行控制器的端口。
11。上載!
步驟8:MULTIWII
現在您已經完成了使用Multiwii GUI的時間
打開MultiwiiConf文件夾
application.windows32(用于Windows 64位或32位)不使用application.windows64,因為它不起作用
打開MultiWiiConf.exe
1.選擇連接了飛行控制器的COM端口,然后單擊“開始”
之后,它現在應該具有讀數了。
2。為了使儀表板移動,首先將FLight控制器放在平坦的表面上,然后按一下校準的ACC,使它校準10秒鐘左右,然后校準磁力計。單擊CALIB_MAG之后,您將獲得30秒的時間來旋轉飛行控制器。所有軸確保其達到360度旋轉。
3。完成后,探索GUI并繼續下一步。
步驟9:更換舊的飛行控制器
讓我們減少細節并
在我的情況下,將舊的飛行控制器替換為CC3D
安裝DIY飛行控制器
將磁力計放置在機架上的某個位置,不受電動機或電池的影響。
要進行藍牙編程,請用HC 05或HC 02藍牙模塊替換FTDI編程器。請注意,某些藍牙模塊需要重新配置為115K波特才能工作
無線編程?
使用Wires進行編程很爛,可以進入下一個更好的水平
在您的android手機上下載
對于蘋果設備,請嘗試尋找一些multiwii程序,因為我對蘋果一無所知?
這個應用程序非常有用,它消除了攜帶筆記本電腦并在現場進行調優,然后通過“電纜和一臺筆記本電腦”因此,在這里祝您飛行安全,并祝您愉快!
順便說一句,對我來說,最難調整的部分是氣壓計或ALT HOLD PID,不過,可以通過Youtube和Google搜索所有內容,以獲取PID調整技巧和教程。
第11步:飛行!
安全飛行的人不要在街道或擁擠的地方飛行無人機,在空曠的地方像足球一樣調整無人機
責任編輯:wv
-
Arduino
+關注
關注
189文章
6492瀏覽量
190147 -
飛行控制器
+關注
關注
1文章
26瀏覽量
10498
發布評論請先 登錄




無人機飛行控制器的組成部件和工作原理

如何使用Arduino實現CAN總線通信呢
stm32與Arduino的比較
無人機飛行控制器中都用了哪些傳感器?




開源項目!用ESP8266 DIY會爬墻的無人機





 工商網監
工商網監
評論