") 基于DTMF的障礙回避機器人的制作
基于DTMF的障礙回避機器人的制作
第1步:方框圖
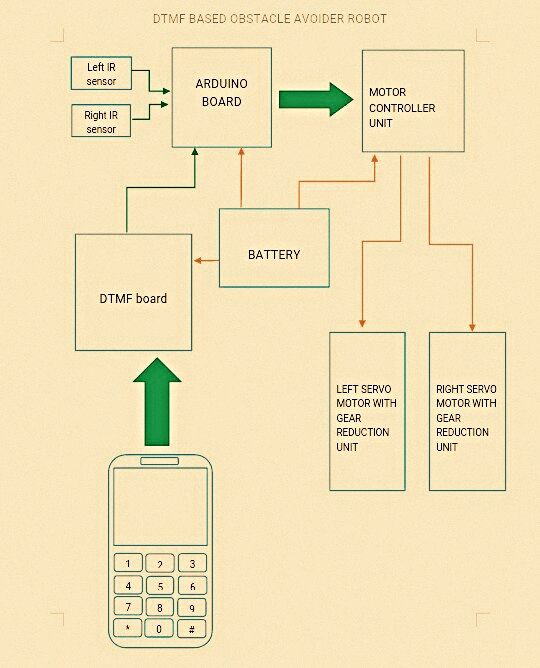
項目背后的工作原理如圖所示,
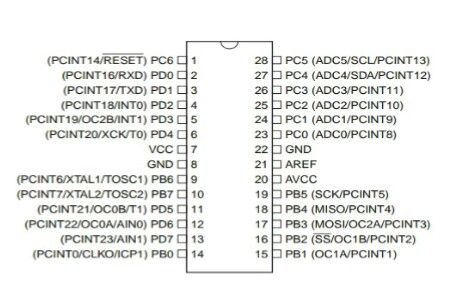
第2步:開始使用ARDUINO BOARD
ARDUINO BOARD電路板的優(yōu)勢,所有必要的程序都被提供給這個板,它可以控制所有,
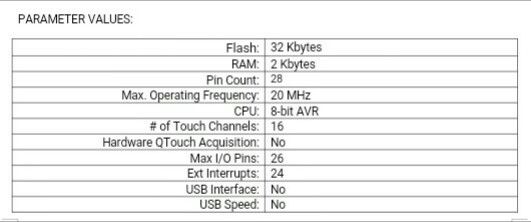
ATmega328是由Atmel創(chuàng)建的單芯片微控制器,屬于megaAVR系列。 ATmega328P是一款基于AVR增強型RISC架構(gòu)的低功耗CMOS 8位微控制器。通過在單個時鐘周期內(nèi)執(zhí)行強大的指令,ATmega328P實現(xiàn)了接近每MIPS 1 MIPS的吞吐量,使系統(tǒng)設(shè)計人員能夠優(yōu)化功耗與處理速度。
特點:
?高性能,低功耗Atmel?AVR?8 -Bit微控制器系列
?高級RISC架構(gòu)
-131功能強大的指令 - 大多數(shù)單時鐘周期執(zhí)行
-32 x 8通用工作寄存器
- 完全靜態(tài)工作
- 高達(dá)20 MIPS 20MHz時的吞吐量
- 片上2周期乘法器
- 寫入/擦除周期:10,000閃存/100,000 EEPROM
- 數(shù)據(jù)保持:85℃下20年和250℃下100年
- 編程鎖定用于軟件安全
?工作電壓:1.8 - 5.5V
?溫度范圍:-400C至850C
?速度等級:0 - [email protected] - 5.5V,0 - [email protected] - 5.5.V ,0 - 20MHz @ 4.5 - 5.5V
?1MHz,1.8V,250C時的功耗
- 工作模式:0.2mA
- 功耗模式:0.1μA
- 省電模式:0.75μA(包括32kHz RTC)
系列替代方案:
ATmega328的常見替代品是“picoPower”ATmega328P。可以在Atmel網(wǎng)站上找到megaAVR系列所有其他成員的完整列表。
應(yīng)用:
今天,ATmega328常用于許多項目和自治系統(tǒng),其中簡單,低功耗,低成本需要微控制器。也許該芯片最常見的實現(xiàn)是在流行的Arduino開發(fā)平臺上,即Arduino Uno和Arduino Nano模型。
第3步:DTMF BOARD
在這個DTMF板的幫助下,以頻率形式從我們的移動電話中發(fā)出的信號被傳送到邏輯值并被送入ARDUINO板,
什么是DTMF?
DTMF代表雙音多頻。
DTMF是按鍵式電話的常用通信術(shù)語。在電話上撥打鍵盤時形成的音調(diào)(DTMF數(shù)字或DTMF號碼)可用于表征數(shù)字,并且每個數(shù)字使用一些不同的音調(diào)。 DTMF信令主要用于DTMF電話,電話交換系統(tǒng)。許多公司生產(chǎn)發(fā)送和接收DTMF信號的微芯片。電話應(yīng)用程序接口(TAPI)為程序提供了一種檢測DTMF數(shù)字的方法。
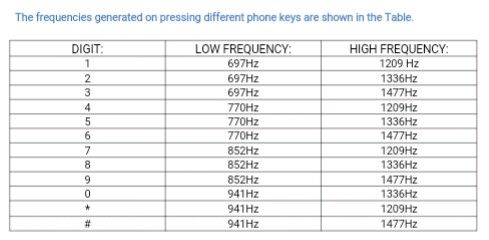
DTMF解碼器如何工作?
然而,隨機聲音總會出現(xiàn)在相似的頻率上DTMF音響系統(tǒng)。建議如果使用兩個音調(diào)來表示數(shù)字,則排除發(fā)生錯誤信號的概率,因此稱為“雙音”。這是在DTMF通信中使用雙音的基礎(chǔ)。 DTMF撥號使用帶有12或16個按鈕的鍵盤。在鍵盤上按下的每個鍵產(chǎn)生兩個特定頻率的音調(diào),因此語音或隨機信號不能模仿DTMF信令音調(diào)。一個音調(diào)由高DTMF頻率組音調(diào)產(chǎn)生,另一個音調(diào)從低DTMF頻率組產(chǎn)生。
當(dāng)按下一個按鈕時,行和音調(diào)都由電話或按鍵音樂器產(chǎn)生。這兩種音調(diào)將是獨特的,并且與其他鍵的音調(diào)不同。因此,有一個與按鈕相關(guān)的低頻和高頻,它實質(zhì)上是兩個波傳輸?shù)目偤汀T摶驹砜梢詳U展到一系列應(yīng)用。鍵盤的每行和每列對應(yīng)于特定音調(diào)并創(chuàng)建特定頻率。每個按鈕位于兩個音調(diào)的交叉點。
應(yīng)用:
DTMF信號可通過無線電傳輸,以開啟或關(guān)閉家用電器,閃光燈,電機,攝像機,警告系統(tǒng),灌溉系統(tǒng)等上。這些編碼數(shù)據(jù)可以在微控制器中存儲和處理,以執(zhí)行不同的任務(wù)(即):自動車庫門打開系統(tǒng),使用DTMF技術(shù)的手機控制機器人車輛等。..。..
步驟4:電機驅(qū)動電路
電機驅(qū)動器作為繼電器運行,然后運行根據(jù)ARDUINO板執(zhí)行的指令伺服電機,
特點:
。供電電壓高達(dá)46 V
。直流電流高達(dá)4 A
。低飽和電壓
。過溫保護邏輯“0”輸入電壓高達(dá)1.5 V(高噪聲抗擾度)
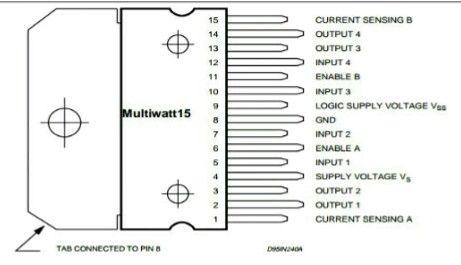
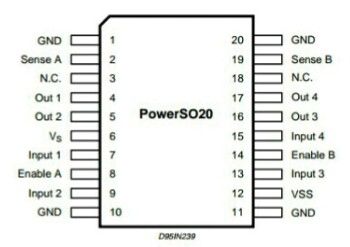
描述:
L298是采用15引腳Multiwatt和PowerSO20封裝的集成單片電路。它是一款高電壓,大電流雙全橋驅(qū)動器,設(shè)計用于接受標(biāo)準(zhǔn)TTL邏輯電平并驅(qū)動感性負(fù)載,如繼電器,螺線管,直流和步進電機。提供兩個使能輸入,以獨立于輸入信號啟用或禁用器件。每個橋的下晶體管的發(fā)射極連接在一起,相應(yīng)的外部端子可用于連接外部傳感電阻。提供額外的電源輸入,以便邏輯工作在較低的電壓。
步驟5:工作
最后全部使用必要的電線連接,項目準(zhǔn)備按照我們的命令工作,
通過連接AUX電纜與電話和本地電路板,信號可以傳輸?shù)紸RDUINO板,從而命令執(zhí)行。
在我的項目中,我只提供了幾個命令,例如,如果我點擊1,汽車前進2 - 》后退
3 - 》右轉(zhuǎn)
4 - 》向左轉(zhuǎn)彎
5 - 》在當(dāng)前點停止
此外它還有一對紅外傳感器,它可以檢測出來的障礙物,因此車輛在相反方向轉(zhuǎn)動90°以免發(fā)生即將發(fā)生的碰撞。
責(zé)任編輯:wv
-
機器人
+關(guān)注
關(guān)注
213文章
29506瀏覽量
211621 -
DTMF
+關(guān)注
關(guān)注
1文章
74瀏覽量
47510
發(fā)布評論請先 登錄
當(dāng)機器人遇上“語言障礙”:CCLINKIE轉(zhuǎn)Profinet的“破冰外掛”來啦\\!
盤點#機器人開發(fā)平臺
詳細(xì)介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
海康機器人布局關(guān)節(jié)機器人業(yè)務(wù)
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
AGV轉(zhuǎn)運機器人需求快速增長,如何進行障礙物檢測確保安全?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論