") 如何構(gòu)建一個(gè)基于arduino的戰(zhàn)斗數(shù)據(jù)記錄器
如何構(gòu)建一個(gè)基于arduino的戰(zhàn)斗數(shù)據(jù)記錄器
第1步:工具和零件
零件:
Ublox NEO 6米GPS模塊:ebay/amazon
Micro SD卡模塊:ebay/amazon
Micro SD卡(高速或無需容量):amazon
Arduino pro mini:ebay/amazon
FTDI編程器和相應(yīng)的電纜:ebay/amazon
Perfboard:ebay/amazon
連接線:ebay/amazon
Header引腳:ebay/amazon
整流二極管:ebay/amazon
2個(gè)1K歐姆電阻:ebay/amazon
1500微米紙板
工具:
烙鐵和焊料
熱膠槍
筆記本電腦或計(jì)算機(jī)
萬用表(并非嚴(yán)格必要,但有很大幫助)
伸出援助之手(同樣沒有必要,但有幫助)
工藝刀
可選:
物品用于原型制作不是必需的但是非常有幫助
面包板
Arduino Uno
跳線
第2步:理論和原理圖
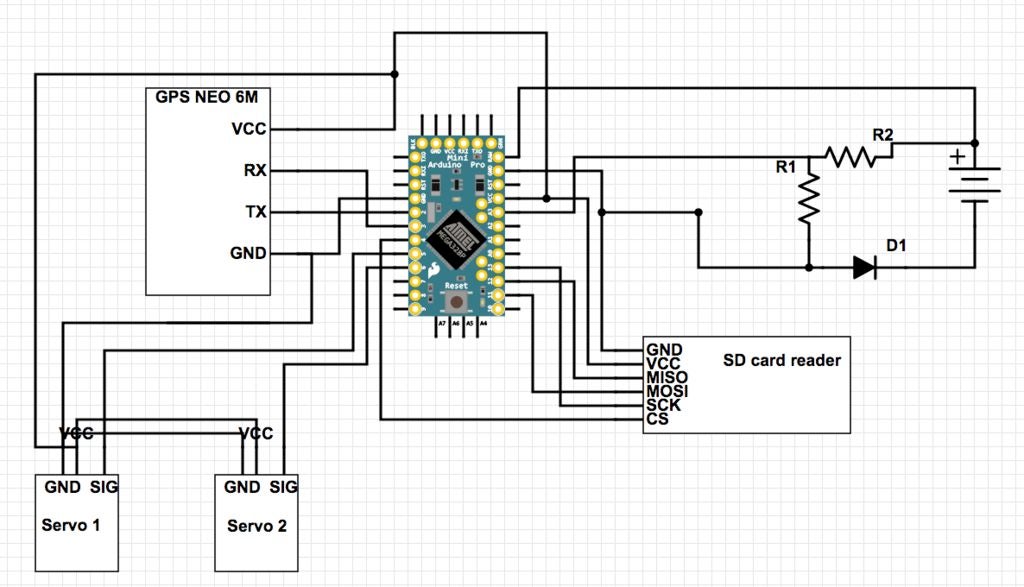
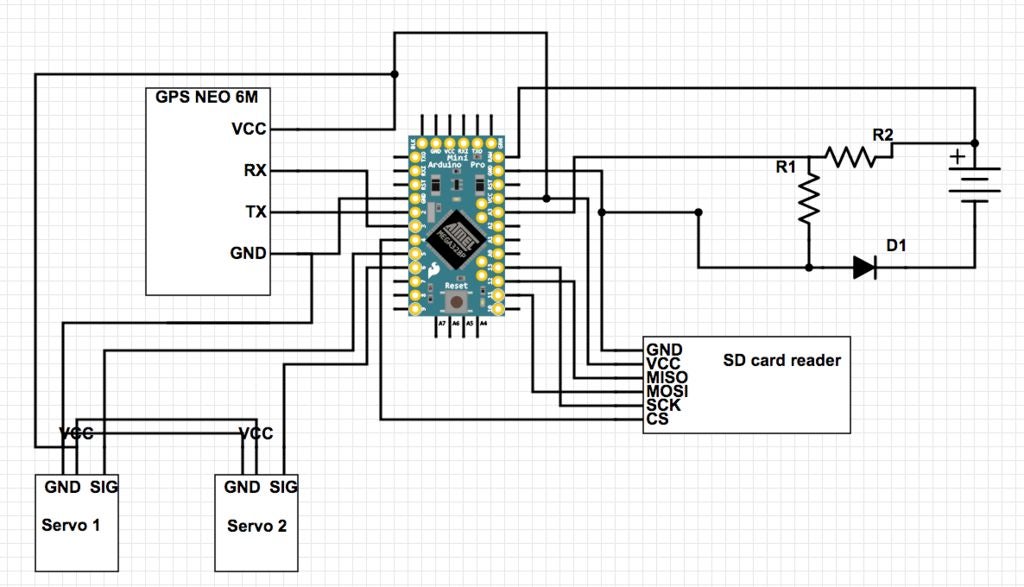
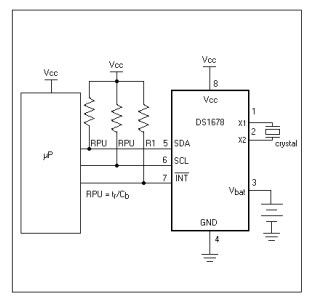
設(shè)備的大腦是Arduino pro mini,它由RC車輛(在我的情況下是飛機(jī))Li-Po電池平衡端口供電。我有一個(gè)2s電池的設(shè)置,但這可以很容易地改變,以適應(yīng)其他電池尺寸。
這是不完整的,我將在完成控制面讀取后更新此說明
Servo1將是我的飛機(jī)電動(dòng)飛機(jī),而伺服2將是我的飛行控制器伺服輸出。
GPS模塊正在以NMEA字符串的形式從GPS衛(wèi)星接收數(shù)據(jù)。這些字符串包含位置信息,但也包含確切的時(shí)間,速度,航向,高度和許多其他有用的數(shù)據(jù)。接收到字符串后,將使用TinyGPS代碼庫提取對該項(xiàng)目有用的信息。
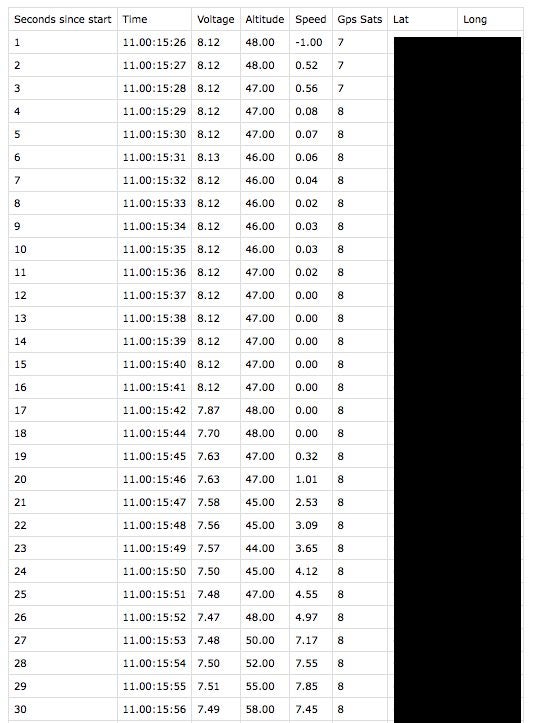
該數(shù)據(jù)以及電池電壓和elevon位置將以一定速率寫入SD卡。 1Hz此數(shù)據(jù)以CSV(逗號分隔值)格式編寫,并將使用谷歌地圖解釋以繪制飛行路徑。
步驟3:原型設(shè)計(jì)
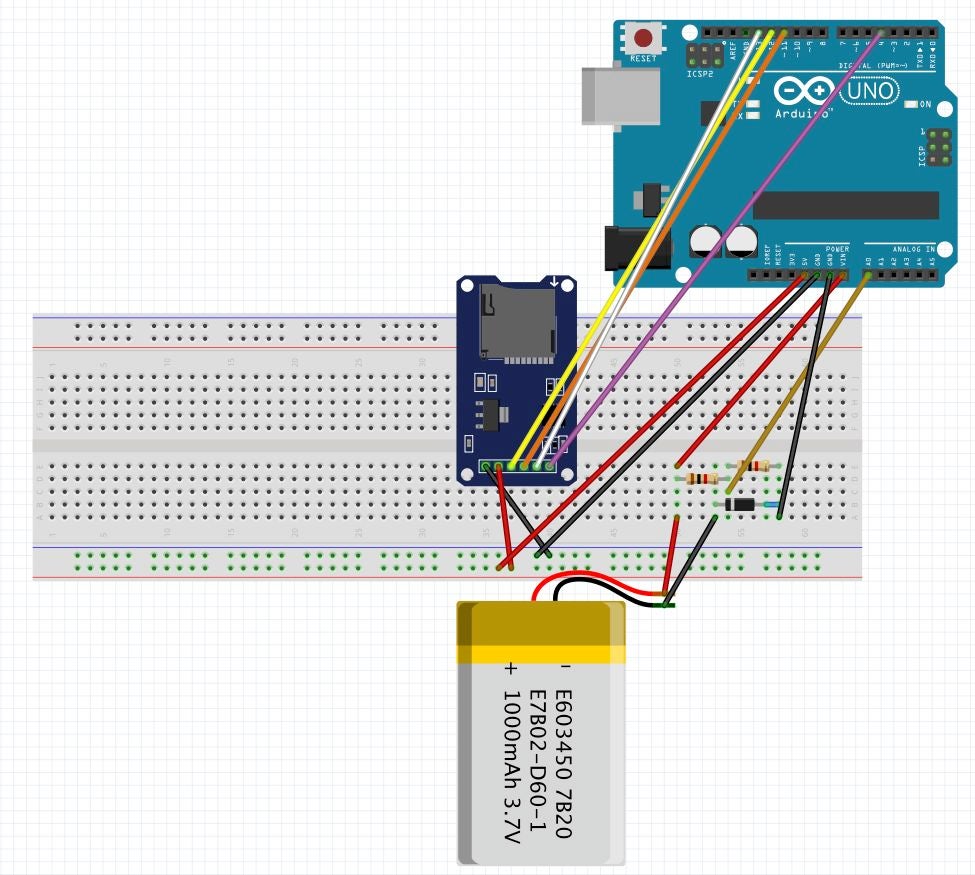
注意:上面沒有顯示GPS模塊的連接。 GPS的接線方式如下:
GND到Arduino地
VCC到Arduino 5V
RX至Arduino數(shù)字引腳3
TX至Arduino數(shù)字引腳2
為了測試所有組件是否正常運(yùn)行,最好先將所有組件放在面包板上,因?yàn)槟幌M挥性趯⑺薪M件放在一起后才能找到有缺陷的部件。需要的附加代碼庫是TinyGPS庫,鏈接可以在下面找到。
微型gps
下面的電壓測試器代碼只測試電壓測量電路。需要更改調(diào)整值以使arduino讀取正確的電壓。
文件代碼用于測試SD卡模塊和micro SD卡,以確保兩者均能正確讀寫。
使用gpsTest代碼來確保gps接收到正確的數(shù)據(jù)并且配置正確。此代碼將輸出您的緯度,經(jīng)度和其他實(shí)時(shí)數(shù)據(jù)。
如果所有這些部分正確地協(xié)同工作,您可以繼續(xù)下一步。
第4步:焊接和接線
在進(jìn)行任何焊接或布線之前,將所有組件布置在一塊紙板上,并將其切割到組件的外部尺寸。這將成為您所有部件的安裝板。
通過將穿孔板切割到最小尺寸來制作電路板,因?yàn)橹亓亢统叽缡莾?yōu)先考慮的。將割臺銷釘沿切好的穿孔板的邊緣焊接到位,這是電池平衡端口以及將來控制面伺服和飛行控制器將連接的位置。根據(jù)電路圖將2個(gè)1k Ohm電阻器和整流二極管焊接到位。
根據(jù)電路圖將micro SD卡模塊焊接到arduino的引腳上,以使用AWG 24導(dǎo)線進(jìn)行連接。/p》
根據(jù)電路圖和更多相同類型的電線再次在穿孔板和arduino之間建立連接。
注意:GPS是靜電敏感設(shè)備焊接時(shí)要小心,連接時(shí)不要讓任何電流穿過任何電線
使用長度約3-4cm(1)將GPS模塊引腳焊接到arduino上的相應(yīng)引腳-1.5英寸)的電線,這會(huì)使GPS模塊有足夠的松弛空間,可以折疊到后卡的另一側(cè)。
檢查并仔細(xì)檢查所有連接的連續(xù)性,以確保所有接線正確
使用熱膠將SD卡模塊,Arduino Pro Mini裝上,然后在面板的一側(cè)自定義穿孔板另一方面是紙板和GPS模塊和天線。
一旦你將所有部件正確連接并安裝到紙板上,就可以繼續(xù)使用代碼了。
第5步:代碼
這是在最終設(shè)備上運(yùn)行的代碼。當(dāng)此代碼運(yùn)行時(shí),一旦GPS修復(fù)了3個(gè)以上的衛(wèi)星,GPS模塊上的LED將開始閃爍。一旦arduino啟動(dòng),arduino板上的LED將閃爍一次,表明CSV文件已成功創(chuàng)建,然后當(dāng)成功寫入micro SD卡時(shí),它將與GPS LED一起閃爍。如果無法初始化Micro SD卡的LED指示燈,并且很可能是您的接線或Micro SD卡有問題。
此代碼將在每次運(yùn)行程序時(shí)創(chuàng)建一個(gè)新的CSV文件。標(biāo)記為“flightxx”,其中xx是介于00和99之間的數(shù)字,每次運(yùn)行程序時(shí)都會(huì)增加。
要使電子表格中的當(dāng)前時(shí)間字段正確,您需要將UTC(協(xié)調(diào)世界時(shí))轉(zhuǎn)換為正確的時(shí)區(qū)。對我來說,值是UTC +2.0,因?yàn)檫@是我所在的時(shí)區(qū),但是可以通過更改“時(shí)區(qū)”浮點(diǎn)數(shù)在代碼中進(jìn)行更改。
步驟6:測試,測試,測試
現(xiàn)在你應(yīng)該有一個(gè)工作系統(tǒng),是時(shí)候測試它,確保一切都按預(yù)期運(yùn)行。
一旦一切正常,您將在電子表格上獲得一個(gè)輸出,該輸出似乎可以正確地進(jìn)行任何細(xì)微調(diào)整。例如,我最初使用電纜扎帶將設(shè)備安裝在我的飛機(jī)底部,但經(jīng)過一些調(diào)查,我發(fā)現(xiàn)這可以減少任何時(shí)候可以看到的GPS衛(wèi)星數(shù)量減少約40%。
測試系統(tǒng),確保一切正常,并在必要時(shí)對其進(jìn)行完善。
步驟7:豐富數(shù)據(jù)
現(xiàn)在您已擁有一個(gè)可靠的系統(tǒng),現(xiàn)在是時(shí)候弄清楚如何以更易讀的方式顯示數(shù)據(jù)。如果您想一次獲得準(zhǔn)確的速度,或者想要在執(zhí)行某項(xiàng)操作時(shí)準(zhǔn)確檢查車輛的行為,則使用電子表格就可以了,但是如果您想在地圖上繪制整個(gè)飛行或查看每個(gè)數(shù)據(jù)點(diǎn),該電子表格就可以了
以一種更具可讀性的方式在其中提供數(shù)據(jù)豐富功能
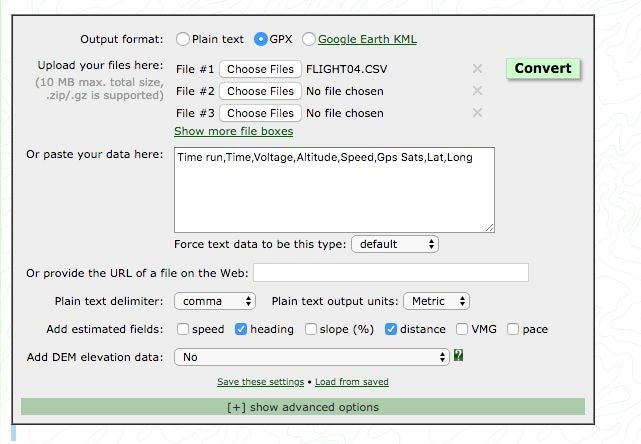
要以一種更具可讀性的方式查看我們的數(shù)據(jù),我們將使用google Earth pro,您可以單擊此處進(jìn)行下載。
現(xiàn)在,您必須將CSV文件轉(zhuǎn)換為GPX文件,Google Earth可以使用GPS可視化工具更輕松地讀取該文件。選擇輸出GPX,上傳CSV文件并下載轉(zhuǎn)換后的文件。然后在Google Earth中打開GPX文件,它會(huì)自動(dòng)導(dǎo)入所有數(shù)據(jù)并將其繪制到一個(gè)不錯(cuò)的飛行路徑中。這還包含其他信息,例如任何時(shí)間點(diǎn)的標(biāo)題。
注意:我已從照片中刪除了lat,長數(shù)據(jù),因?yàn)槲也幌胪嘎段业拇_切位置。
第8步:結(jié)論和可行的改進(jìn)
總而言之,我很滿意這個(gè)項(xiàng)目的結(jié)果。我喜歡我所有航班的數(shù)據(jù)。但是,我需要做一些事情。
最明顯的是,我希望能夠讀取控制表面的確切位置。我有大部分硬件,但我需要在代碼中啟用它。仍然有一些技術(shù)難題需要克服。
我還想添加一個(gè)氣壓計(jì)來獲取更準(zhǔn)確的高度數(shù)據(jù),因?yàn)楫?dāng)前gps高度數(shù)據(jù)似乎只不過是有根據(jù)的猜測而已。
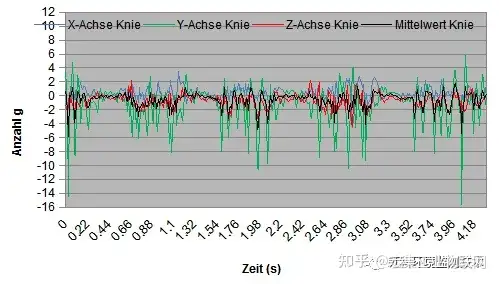
我認(rèn)為添加一個(gè)三軸加速度計(jì)會(huì)很酷,這樣我就能確切地看到飛機(jī)在任何時(shí)候都能承受多大的力。
也許可以創(chuàng)建某種類型的外殼。目前暴露的部件和布線不是很優(yōu)雅或堅(jiān)固。
責(zé)任編輯:wv
-
數(shù)據(jù)記錄器
+關(guān)注
關(guān)注
0文章
54瀏覽量
12901 -
Arduino
+關(guān)注
關(guān)注
189文章
6492瀏覽量
190143
發(fā)布評論請先 登錄
濕度數(shù)據(jù)記錄儀是什么?一文為你解答
通過Arduino Nano Matter開發(fā)板構(gòu)建智能卷簾系統(tǒng)

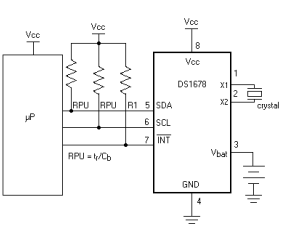
DS1678實(shí)時(shí)事件記錄器技術(shù)手冊
DS1678系列實(shí)時(shí)事件記錄器技術(shù)手冊
數(shù)據(jù)記錄儀的計(jì)數(shù)原理和應(yīng)用場景
測試與測量 | 基于瑞蘇盈科FPGA開發(fā)的數(shù)據(jù)記錄器:高效靈活!

基于Arduino的串口通信項(xiàng)目
為THS3001構(gòu)建一個(gè)簡單的SPICE模型

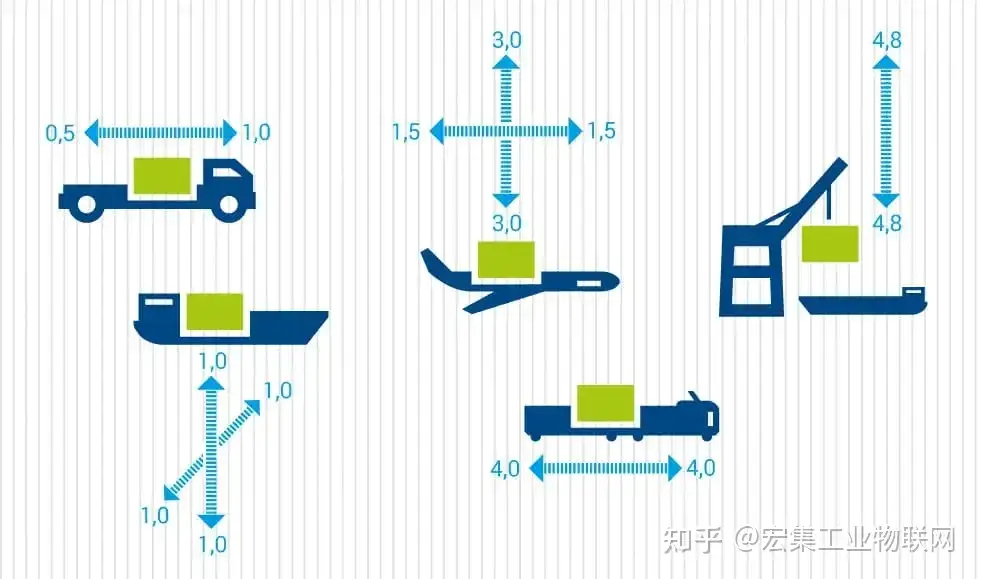
宏集ASPION數(shù)據(jù)記錄器:分析運(yùn)輸過程中的碰撞、沖擊和振動(dòng)
使用Python構(gòu)建高效的HTTP代理服務(wù)器
應(yīng)用案例 HK-MSR數(shù)據(jù)記錄儀如何計(jì)算滑雪時(shí)膝蓋上的應(yīng)力?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論