") 通過(guò)構(gòu)建最小智能體模型可以用來(lái)激發(fā)下一代AI
通過(guò)構(gòu)建最小智能體模型可以用來(lái)激發(fā)下一代AI

9月11日消息,德國(guó)馬普研究所新研究登上Scientific Report,通過(guò)構(gòu)建最小化的智能體模型,對(duì)生物體適應(yīng)環(huán)境的集體行為的產(chǎn)生和變化進(jìn)行了模擬,有望給相關(guān)的AI系統(tǒng),如自主微型機(jī)器人等模仿生物體的集體行為的系統(tǒng)設(shè)計(jì)和研究提供重要參考價(jià)值。生物有機(jī)體會(huì)處理信息,目的是為了實(shí)現(xiàn)交互并適應(yīng)周圍環(huán)境,以尋找食物、交配、避害等。這些有機(jī)體的環(huán)境結(jié)構(gòu)可以誘導(dǎo)對(duì)環(huán)境線索和刺激的適應(yīng)性反應(yīng),并產(chǎn)生深遠(yuǎn)影響。具備專業(yè)優(yōu)化策略的適應(yīng)性集體行為在自然界中無(wú)處不在。
我們開發(fā)了一種最小的智能體模型,可以通過(guò)抽樣軌跡探索環(huán)境。對(duì)采樣軌跡中的空間信息進(jìn)行存儲(chǔ),是我們對(duì)認(rèn)知的最小化定義。我們發(fā)現(xiàn),隨著認(rèn)知智能體構(gòu)建和更新其環(huán)境因果結(jié)構(gòu)的內(nèi)部認(rèn)知表示,系統(tǒng)中出現(xiàn)了復(fù)雜的模式,其中模式形成的開始與認(rèn)知映射的空間重疊有關(guān)。
智能體之間的信息交換會(huì)導(dǎo)致有序-無(wú)序之間的轉(zhuǎn)換。在這個(gè)動(dòng)態(tài)過(guò)程中,可以產(chǎn)生一種Goldstone模式,凸顯出認(rèn)知生物之間信息傳遞的“集體”共同機(jī)制。這些發(fā)現(xiàn)可能普遍適用于分散式AI群系統(tǒng)的設(shè)計(jì)。
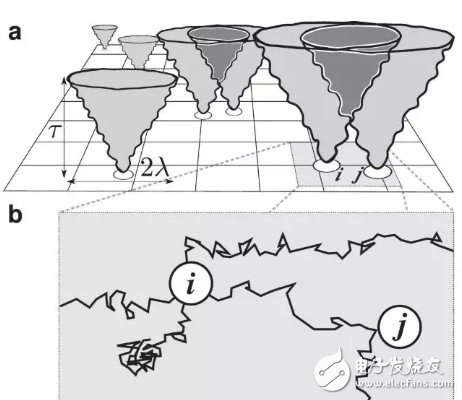
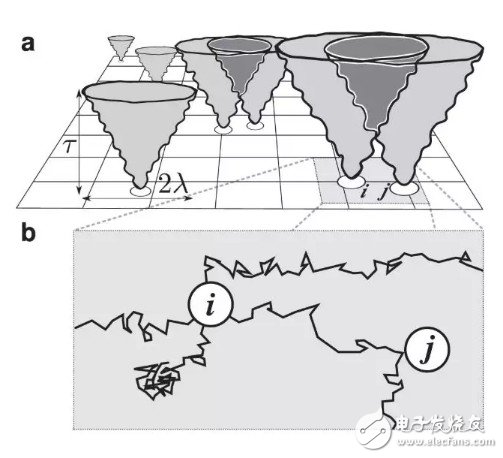
上圖所示為在二維空間上移動(dòng)的幾個(gè)智能體的示意圖,垂直維度代表時(shí)間。這些智能體彼此之間進(jìn)行相互作用的同時(shí),也在和環(huán)境進(jìn)行相互作用。每個(gè)智能體都會(huì)探索可用的配置空間,并獲取有關(guān)其結(jié)構(gòu)的信息,并在這個(gè)過(guò)程中構(gòu)建認(rèn)知映射,響應(yīng)周圍環(huán)境來(lái)優(yōu)化自身行為。
簡(jiǎn)單智能體的集體行為可以表現(xiàn)出令人驚嘆的組織化程度,比如盤狀圓盤菌的細(xì)胞群、白蟻群構(gòu)建復(fù)雜的結(jié)構(gòu),或成功防御掠食者的椋鳥或魚群,都會(huì)表現(xiàn)出這種高度組織化特征。
雖然單個(gè)智能體對(duì)周圍的環(huán)境刺激做出的反應(yīng)是局部的、單獨(dú)的行為,而且大多數(shù)情況下是無(wú)意識(shí)的,但多智能體的行為結(jié)果往往表現(xiàn)為精心設(shè)計(jì)一樣。這種現(xiàn)象自然地引發(fā)了一個(gè)問(wèn)題,即在個(gè)體認(rèn)知能力相當(dāng)有限的個(gè)體社會(huì)中,這種“智能化”集體行為的特征是什么?
因此,從基本的角度研究個(gè)體行為者的認(rèn)知能力對(duì)其集體行為的影響是非常有意義的。這需要定義認(rèn)知概念,這些概念同時(shí)具有足夠的一般性,以類似于集體現(xiàn)象中遇到的廣泛的代理,但同時(shí)又足夠簡(jiǎn)單,無(wú)法用于統(tǒng)計(jì)物理方法。
認(rèn)知代理必須能夠預(yù)測(cè)未來(lái)事件。比如一只試圖逃避獅子追捕的羚羊,可以根據(jù)自己對(duì)周圍環(huán)境的了解,選擇一條通向具有多種逃生可能性的開放空間的道路,而非通往死胡同的道路。
再比如一個(gè)國(guó)際象棋選手,其活動(dòng)發(fā)生在棋盤上的動(dòng)作的抽象空間中。選手的內(nèi)部認(rèn)知映射可以讓她思考可能的走法及其后果。根據(jù)經(jīng)驗(yàn)和技能,選手能夠考慮她可能的下一步棋,對(duì)手會(huì)怎樣反擊、可能做出的其他應(yīng)對(duì)等等。
在本研究中,我們將“認(rèn)知能力”定義為智能體確定給定環(huán)境中可能的棋盤著法數(shù)量的能力,作為該量度的直接概括。這種能力取決于智能體的認(rèn)知映射,我們可以假設(shè),與國(guó)際象棋選手類似,智能體將尋求能夠令未來(lái)行棋著法數(shù)量最大化的行動(dòng)。
我們認(rèn)為,最佳的信息處理動(dòng)態(tài)能力應(yīng)該反映出智能體對(duì)復(fù)雜壓力和刺激作出反應(yīng)的能力水平。這里僅其中的信息或熵最大化已發(fā)現(xiàn)憑經(jīng)驗(yàn)且可能構(gòu)成的基本機(jī)制的幾個(gè)例子,以信息最大化作為人類認(rèn)知特征的量度。比如考察最大熵準(zhǔn)確模擬靜息狀態(tài)的人類大腦活動(dòng):與健康人相比,ADHD患者的信號(hào)熵比較低。
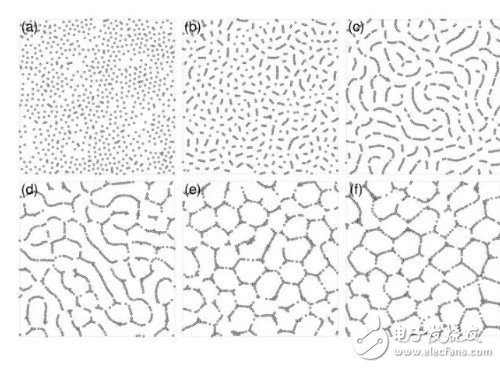
圖1:認(rèn)知智能體系統(tǒng)及其認(rèn)知映射的示意圖。(a)從配置空間中的初始條件開始,代理(空心圓)通過(guò)持續(xù)時(shí)間τ的假設(shè)采樣軌跡創(chuàng)建其周圍環(huán)境的認(rèn)知圖。(b)所示為從認(rèn)知智能體i發(fā)出的四個(gè)采樣軌跡。由于其中一個(gè)軌跡影響代理j,代理i被迫改變其軌跡,從而響應(yīng)其對(duì)環(huán)境的認(rèn)知表現(xiàn)。認(rèn)知能力表現(xiàn)為一個(gè)智能體進(jìn)入另一個(gè)智能體空間之后最大化剩余選項(xiàng)的趨勢(shì),并以盡量高效的方式避免重疊區(qū)域
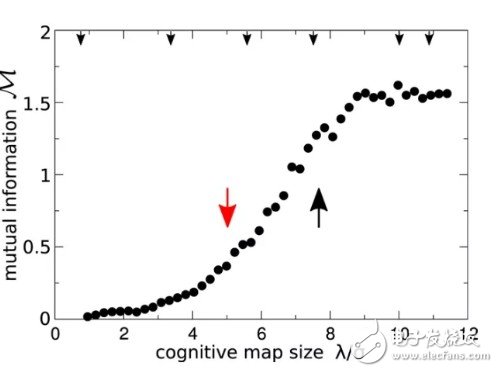
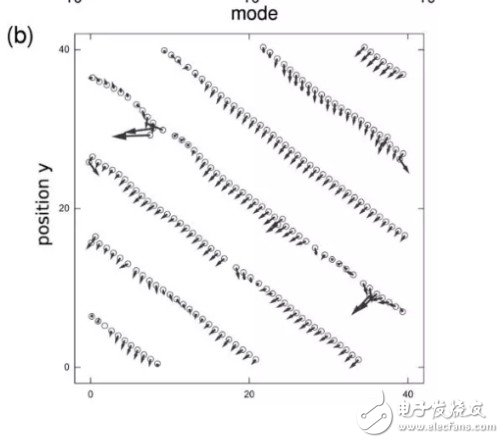
圖2所示為隨著映射大小λ的增加,系統(tǒng)的穩(wěn)態(tài)配置情況
上圖為互信息的依賴性中號(hào)關(guān)于認(rèn)知圖λ的大小。在非常小的λ處,智能體系統(tǒng)呈現(xiàn)出由于每個(gè)代理的幾乎獨(dú)立運(yùn)動(dòng)而幾乎消失的相互信息
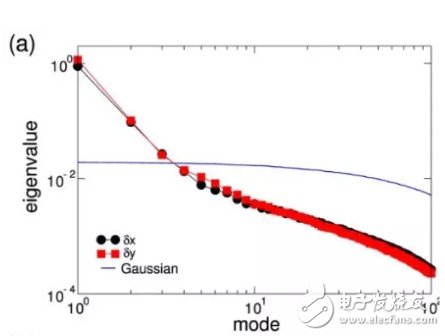
上圖為關(guān)于δx和δy的C ij的特征值,以及與利用高斯分布位移的隨機(jī)矩陣模型生成的不相關(guān)運(yùn)動(dòng)的比較。
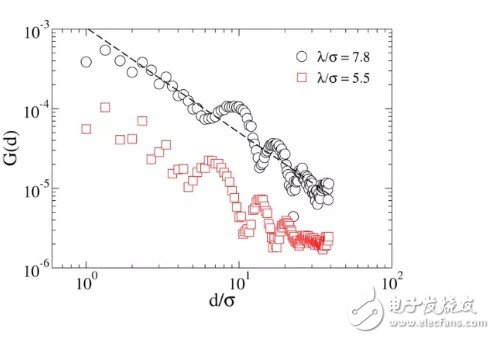
上經(jīng)由相關(guān)函數(shù)定義的智能體之間的位移的空間相關(guān)性
總之,我們的研究為理解認(rèn)知智能體系統(tǒng)中的非平衡轉(zhuǎn)變邁出了第一步,這種系統(tǒng)可以動(dòng)態(tài)地與環(huán)境實(shí)現(xiàn)相互作用,并通過(guò)最大化其認(rèn)知映射的信息內(nèi)容來(lái)反應(yīng)認(rèn)知能力的高低。我們的研究成果可以給相關(guān)的人工系統(tǒng),如自主微型機(jī)器人等明確自主模仿生物體的集體行為的設(shè)計(jì)的研究提供重要的參考價(jià)值。
-
人工智能
+關(guān)注
關(guān)注
1806文章
49008瀏覽量
249289 -
模型
+關(guān)注
關(guān)注
1文章
3517瀏覽量
50401
發(fā)布評(píng)論請(qǐng)先 登錄
使用Langbase平臺(tái)和Gemini模型構(gòu)建AI智能體
廣和通發(fā)布新一代AI語(yǔ)音智能體FiboVista
AI耳機(jī)邁入智能體時(shí)代,2037年65%應(yīng)用將為智能體驅(qū)動(dòng)
光庭信息推出下一代整車操作系統(tǒng)A2OS
企業(yè)使用NVIDIA NeMo微服務(wù)構(gòu)建AI智能體平臺(tái)
英特爾與面壁智能宣布建立戰(zhàn)略合作伙伴關(guān)系,共同研發(fā)端側(cè)原生智能座艙,定義下一代車載AI

首創(chuàng)開源架構(gòu),天璣AI開發(fā)套件讓端側(cè)AI模型接入得心應(yīng)手
《零基礎(chǔ)開發(fā)AI Agent——手把手教你用扣子做智能體》
百度李彥宏談?dòng)?xùn)練下一代大模型
日英聯(lián)手開發(fā)下一代量子計(jì)算機(jī)
NVIDIA助力輕威科技開發(fā)下一代多人實(shí)時(shí)運(yùn)動(dòng)捕捉系統(tǒng)
通過(guò)電壓轉(zhuǎn)換啟用下一代ADAS域控制器應(yīng)用說(shuō)明

通過(guò)下一代引線式邏輯IC封裝實(shí)現(xiàn)小型加固型應(yīng)用
下一代高功能新一代AI加速器(DRP-AI3):10x在高級(jí)AI系統(tǒng)高級(jí)AI中更快的嵌入處理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論