") 感官增強可穿戴設(shè)備的制作教程
感官增強可穿戴設(shè)備的制作教程

第1步:Whisker Assembly
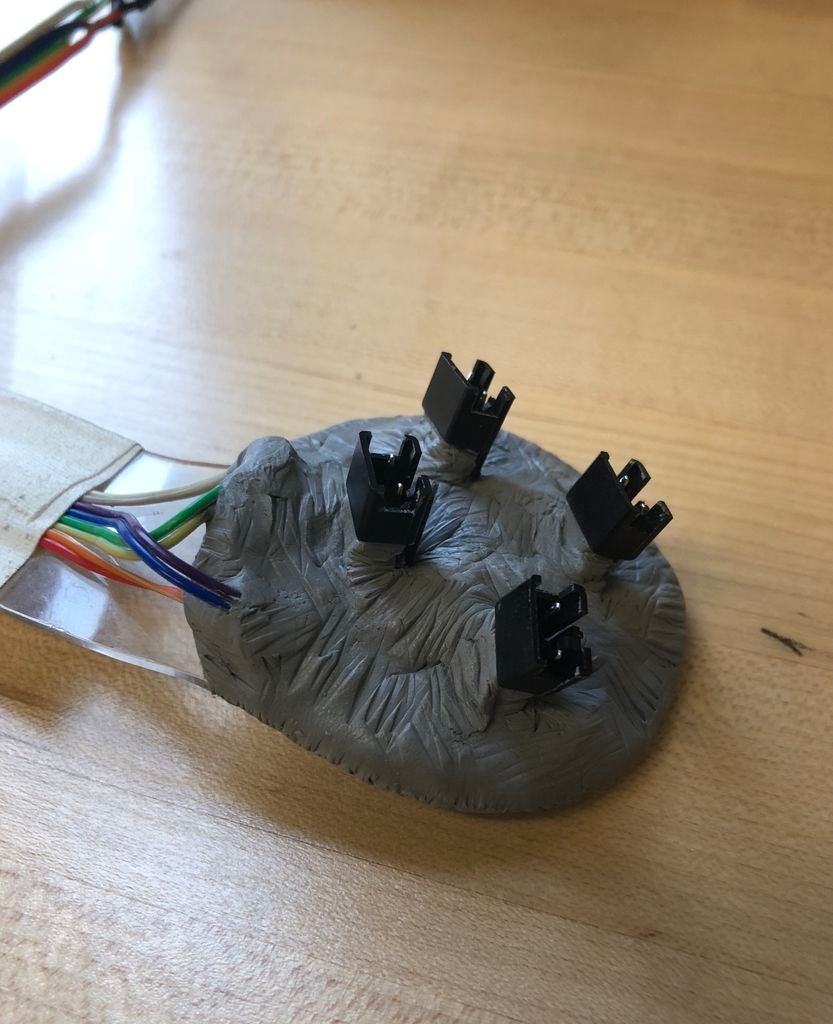
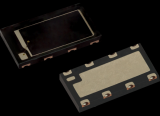
我花了一些時間來開發(fā)一種足夠靈活的晶須傳感器設(shè)備,以模仿真正的晶須,但又足夠堅硬,能夠始終如一地恢復(fù)直線,不彎曲的位置。我最終使用了Flexpoint傳感器系統(tǒng)的4“單向彎曲/彎曲傳感器(見圖1)。將JST插頭焊接到傳感器的支腳上,然后是14英寸長,0.08英寸寬,0.03英寸厚的聚苯乙烯帶(我在當(dāng)?shù)匾患椅褰鸬曩徺I了硅膠,將硅膠粘在傳感器上,進(jìn)行熱收縮,并在晶須裝置的整個底座周圍模制出Sugru保護(hù)涂層。以下是詳細(xì)說明:
- 取下3針JST連接器的插頭端并取下中心線(參見圖2-4)
- 剪斷插頭線你有~1.5厘米的電線剩余,然后將這些引線剝離并焊接到傳感器引腳(記住插頭/傳感器的方向)。我使用熱縮來提供絕緣(參見圖5,6)
- 使用某種柔性粘合劑(我使用Liquid Nails硅膠)將聚苯乙烯帶安裝到傳感器上。確保將條帶固定到傳感器上(見圖7,8)
- 取你的Sugru(我使用一個5g的包裝)并將其模塑在傳感器/條帶/插頭制作的底座周圍一定要包住所有這些組件。另外,請確保將Sugru應(yīng)用到足夠高的位置以完全固定條帶,但不要太高以至于限制傳感器的移動/彎曲的容易程度。慢慢來。在Sugru開始硬化之前,你至少需要30-45分鐘。在讓您干燥之前,請確保您的插頭正確插入JST連接器的插座側(cè)(參見圖9-13)
- 最后,我將標(biāo)簽貼在晶須設(shè)備上。使用Side(L/R)和數(shù)字位置(1-4)(參見圖14,15)
- 多做7個(或者你想要的任何數(shù)量的胡須)。一定要以同樣的方式創(chuàng)建每個晶須。這將有助于稍后進(jìn)行傳感器校準(zhǔn)。
步驟2:晶須安裝組件

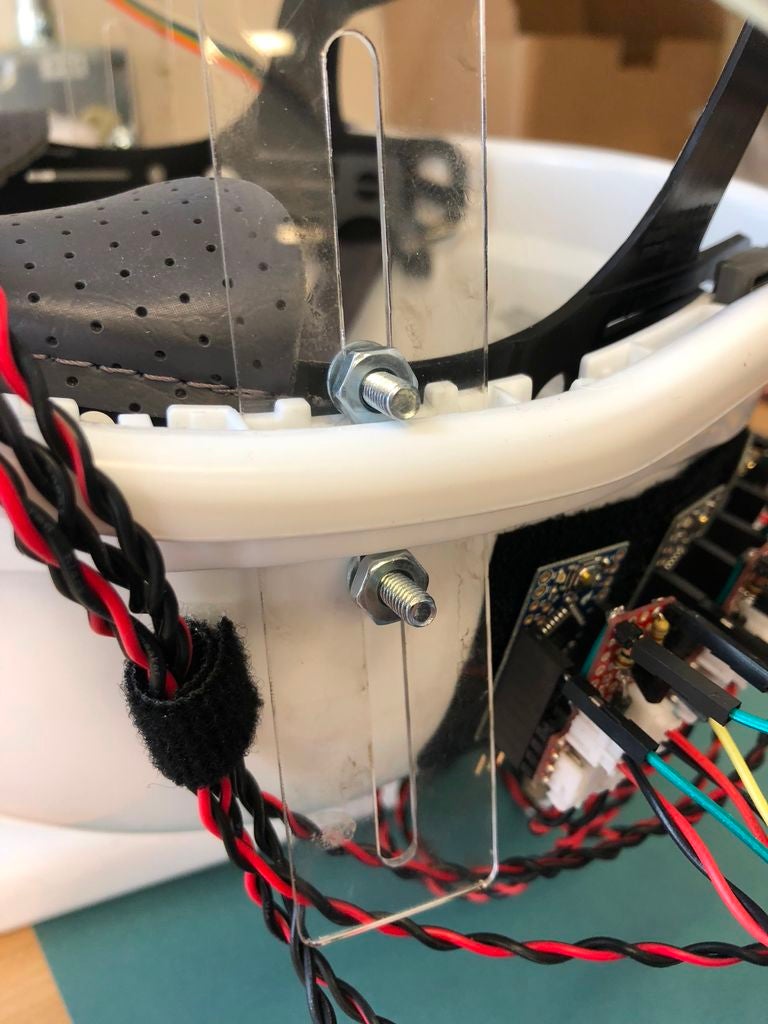
因此,一旦完成胡須,我需要一種方法將它們安裝到頭盔上。我決定設(shè)計并制造一個彎曲的臂,在遠(yuǎn)端有一個圓盤安裝點。我在Adobe Illustrator中設(shè)計了這個組件,并使用了1/16“厚的透明丙烯酸作為材料。激光切割后,我將自定義胡須線束嵌入到Sugru底座的圓盤部分。最后,我確保有一些將手臂連接到頭盔上的方法。在設(shè)計矢量時,我在手臂插入頭盔的部分添加了一個切口。兩個螺釘/螺栓用于將手臂固定到頭盔上(一個位于頭盔插件上方)下面詳細(xì)說明如下:
- 取下2針JST電線組件,擰干并剝?nèi)ル娋€準(zhǔn)備焊接到帶狀電線(見圖1-3)
- 取下3針JST連接器的插座端并取下中心線,然后剝?nèi)?zhǔn)備好的其余電線,以便焊接到帶狀電纜上(見圖4-6)
- 確保你的色帶足夠長并且有足夠的電線來容納你正在實施的晶須數(shù)量。我每邊使用4個晶須,s o每個晶須線束需要8根電線。將JST導(dǎo)線組件焊接到色帶的兩側(cè)并進(jìn)行熱縮(見圖7)
- 打開圖8作為我的胡須臂矢量文件(PDF)。..請記住,這些尺寸是基于我選擇使用的特定頭盔(更具體地說,頭盔的聽力保護(hù)插入槽)。當(dāng)然,如果您愿意,您可以自己設(shè)計。我使用了1/16“透明的丙烯酸樹脂并用我的商店的激光切割機(jī)切割。然后我用一把熱風(fēng)槍(小心地!)塑造手臂以與臉頰齊平(見圖7)
- 將線束放在丙烯酸支架上,并用膠帶暫時固定。然后取出你的Sugru并將JST插座模制在手臂的圓盤部分上。我使用了大約5-6個單一的Sugru包。這需要一些時間才能在結(jié)構(gòu)和美學(xué)上得到正確的結(jié)果。只需確保插座的位置不會在插入時造成晶須重疊。再次,您將有大約30-45分鐘的模具時間。完成后,干燥/固化過夜(見圖9-13)
- 最后,購買一對M3螺栓/螺母,以便將手臂固定在頭盔上。如果有人想出更好的方法來保護(hù)手臂,請告訴我:)(見圖14)
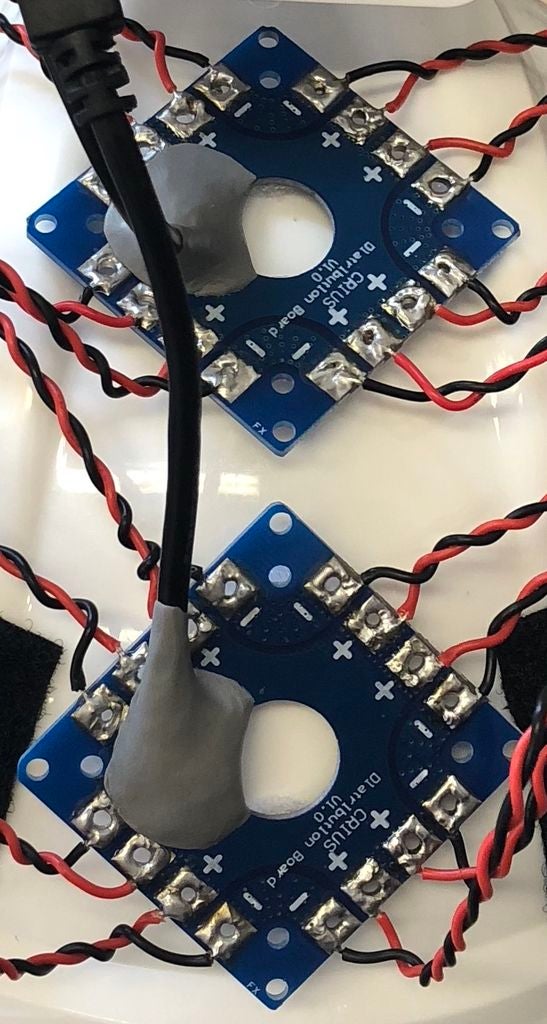
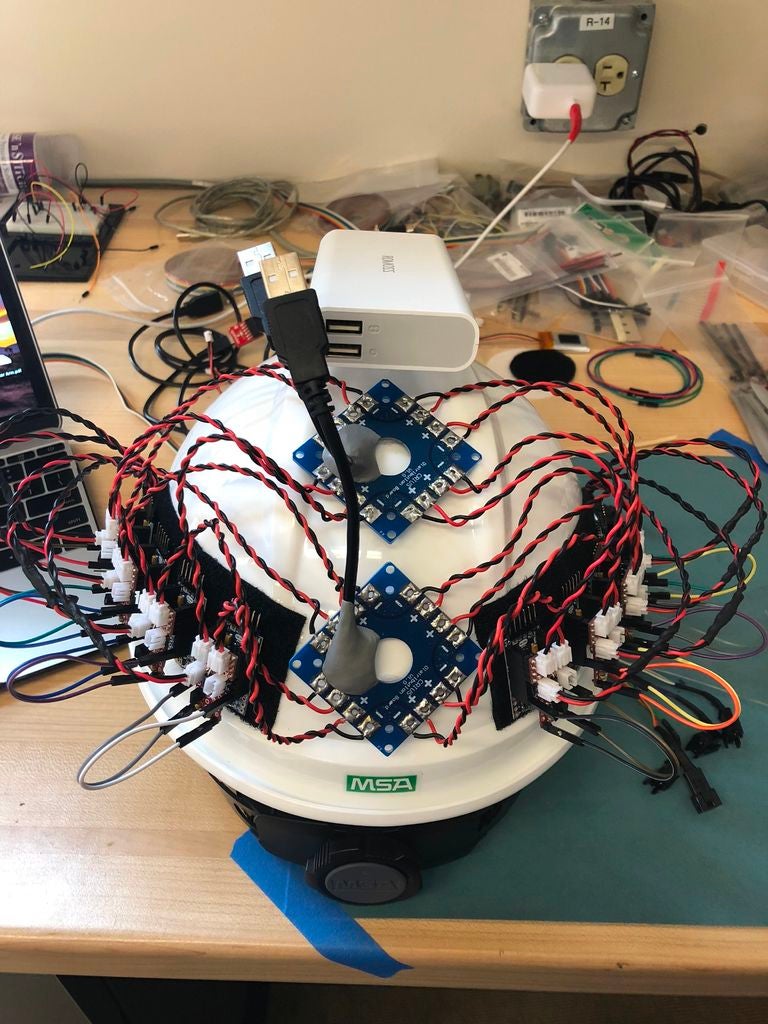
步驟3:振動觸覺顯示器組件,頭盔和電池設(shè)置







這種振動觸覺設(shè)置非常類似于我用于其他感官延伸可穿戴項目的顯示器(Cody the ultra translator dog)。唯一的主要區(qū)別是整個顯示器的位置(前額的一側(cè))和每個陣列中各個振動電機(jī)盤的方向(晶須方向的一對一表示(由四個電機(jī)組成的菱形圖案)。整個系統(tǒng)安裝在典型的施工頭盔上/由其支撐,由單個5V雙輸出電池供電。詳細(xì)說明如下:
- 將延長線擰在一起準(zhǔn)備焊接。確保延長線足夠用于您的應(yīng)用(見圖1,2)
- 將2針JST線組件擰入準(zhǔn)備焊接(見圖3,4)
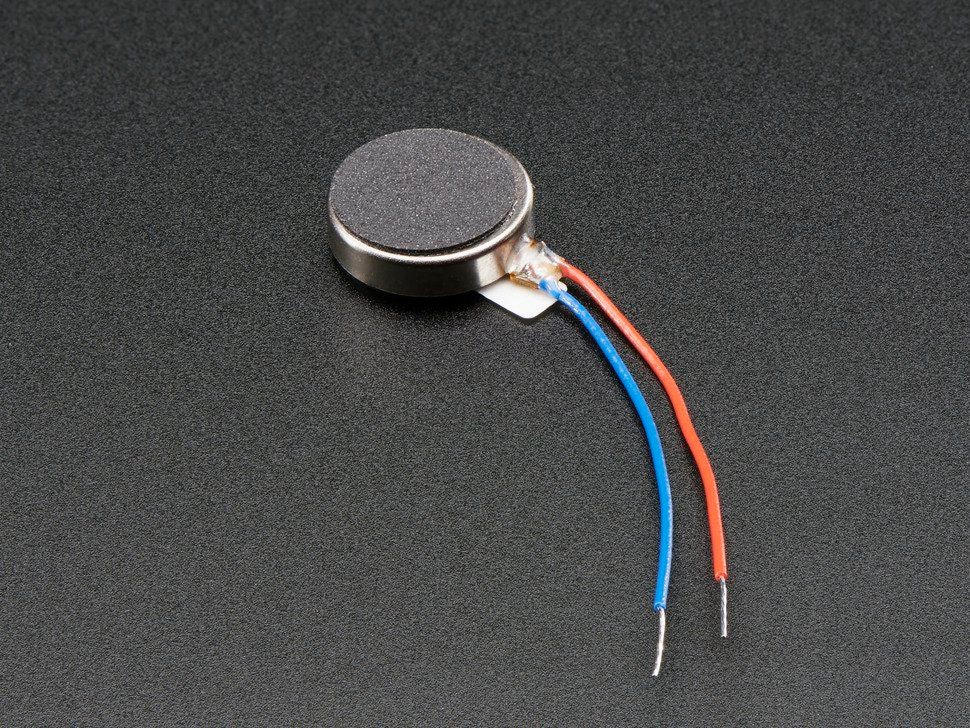
- 拿你的擴(kuò)展線,JST線組件,振動電機(jī)盤和焊接在一起。確保施加熱收縮。另外,將魔術(shù)貼盤(鉤側(cè))粘在電機(jī)背面。重復(fù)7次。最后,剪短兩次維可牢尼龍搭扣電纜扎帶/皮帶,使電機(jī)線束可以綁定在一起歪到頭盔的側(cè)面(見圖5,6)
- 切出兩個直徑5厘米的維可牢尼龍搭扣盤(樁側(cè))。這些將是振動電機(jī)的安裝墊。堅持(我使用超級膠水)將光盤安裝到頭盔的頭帶上(我的間距約為2厘米),并將電機(jī)維護(hù)到安裝墊上,方向與將晶須插座嵌入晶須臂相同(見圖7)
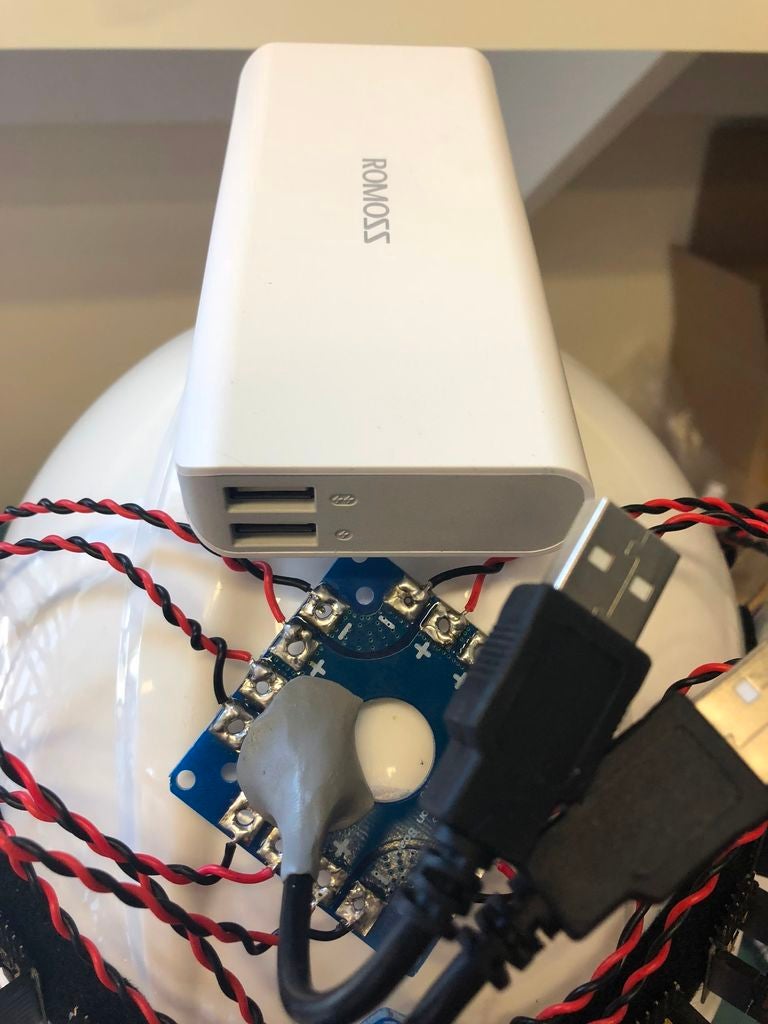
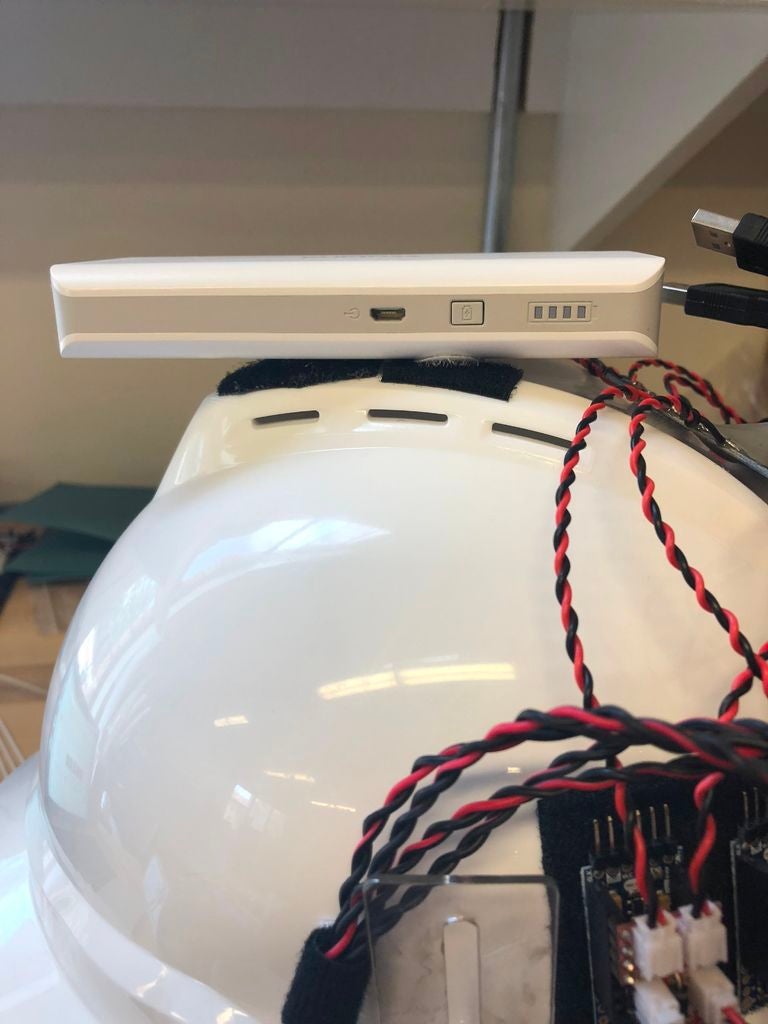
- 將維可牢尼龍搭扣貼在頭盔頂部和電池底部。將電池貼上電源,使輸出朝向頭盔后部(見圖8-10)
- 粘貼其他維可牢尼龍搭扣(樁側(cè))以支撐其余的頭盔固定裝置。在頭盔IOT支持微處理器的每一側(cè)添加維可牢尼龍搭扣帶。將維可牢尼龍搭扣圓盤添加到頭盔背面(電池下方和兩個側(cè)帶之間),IOT支持電源發(fā)射板。在頭盔的兩側(cè)添加小塊維可牢尼龍搭扣(緊靠在須狀臂上部突出部分的前面),IOT支持綁定的馬達(dá)盤布線。
步驟4:微處理器,ProtoShield,和配電板組件
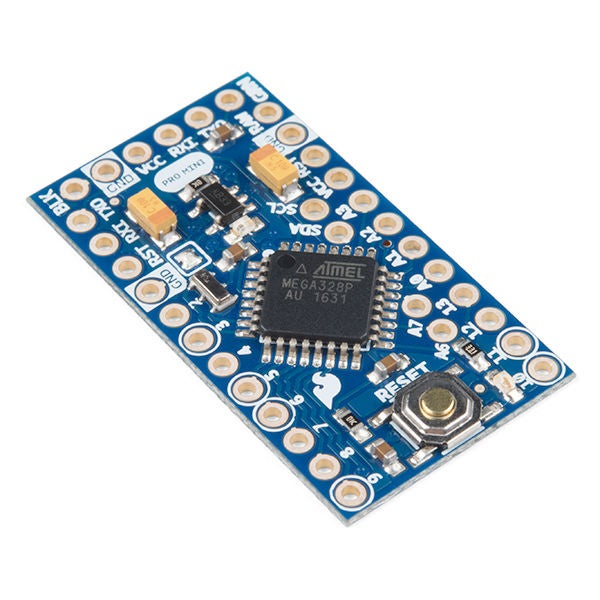
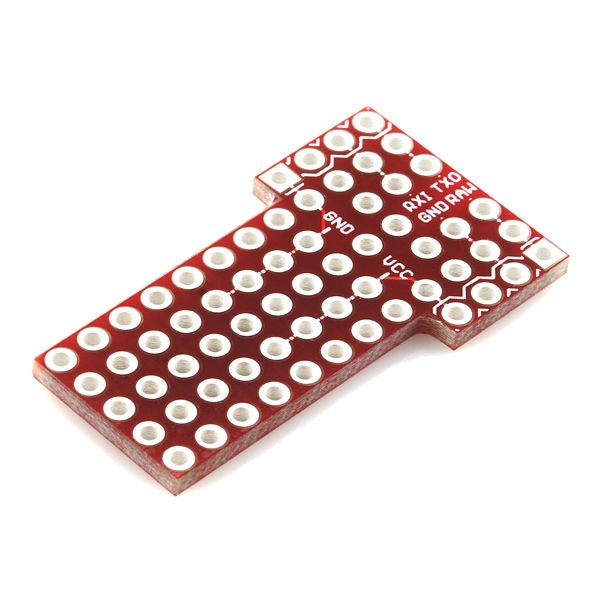




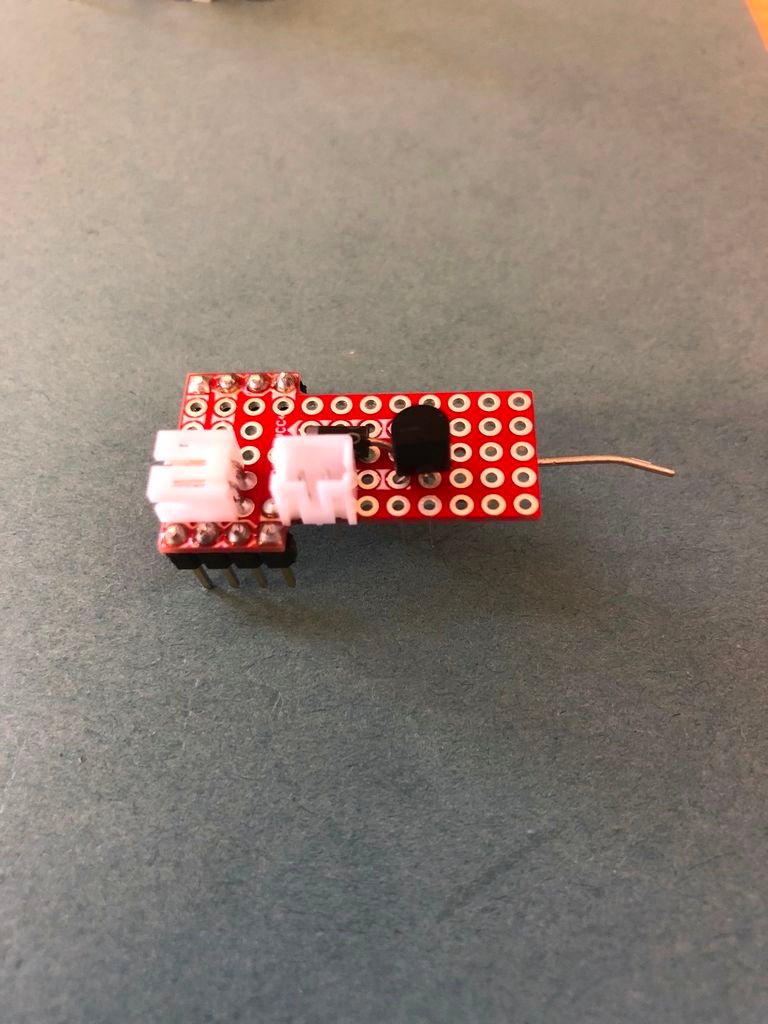
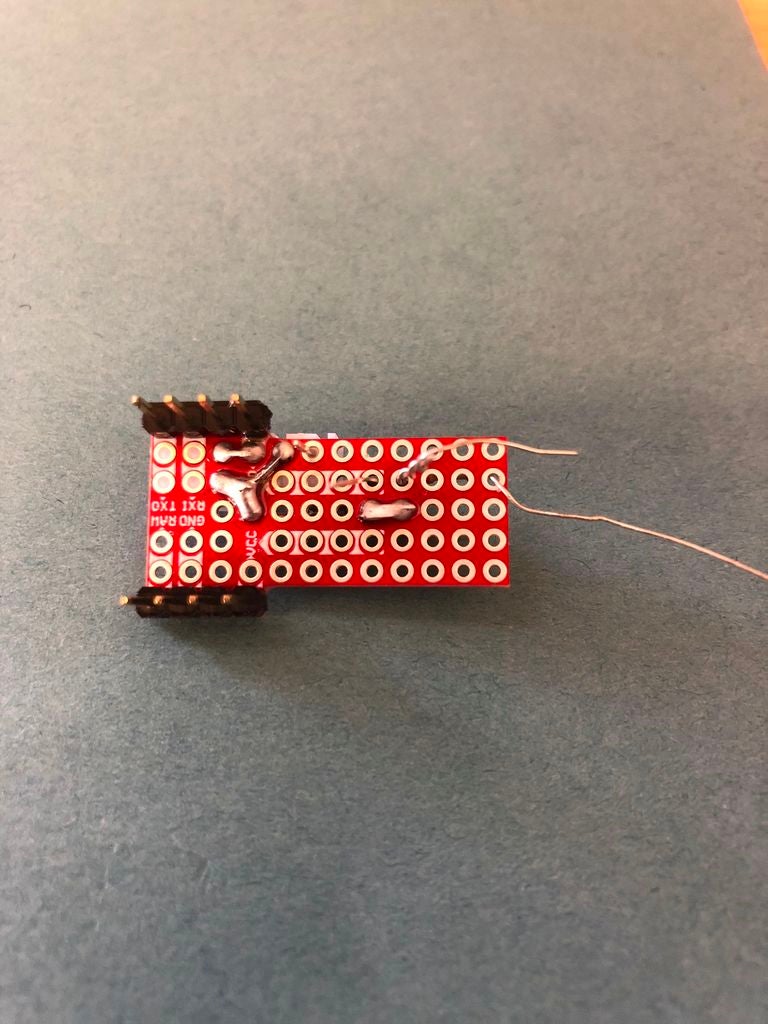








我選擇為每個構(gòu)建一個微處理器晶須。導(dǎo)致采用這種方法的因素包括模塊化的好處,以及對并行ADC同時性的需求。該單元包括(1)SparkFun Arduino Pro Mini(3.3V/8MHz),(1)Pro Mini Protoshield,(1)BC337 NPN晶體管,(1)1N4001功率阻斷二極管,(1)220歐姆電阻,(1) 10k歐姆電阻器,(4)2針JST插頭/插座組件,(2)8針母頭,(1)6針直角頭,(2)4針接頭,(2)1針接頭,(2)母對公跳線 - 3“,實芯線 - 22 AWG,(2)USB-A插頭,(2)配電板和維可牢尼龍搭扣(鉤和樁)。你可以這樣做無論你想要什么樣的順序,我都會在下面詳細(xì)說明我的構(gòu)建。
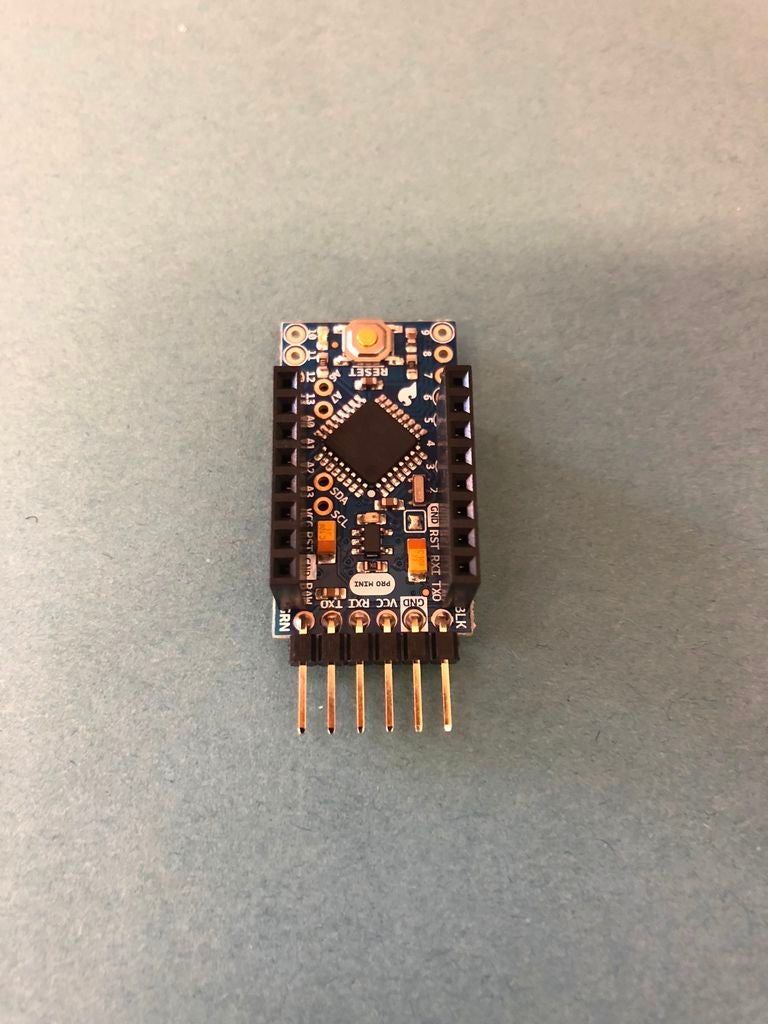
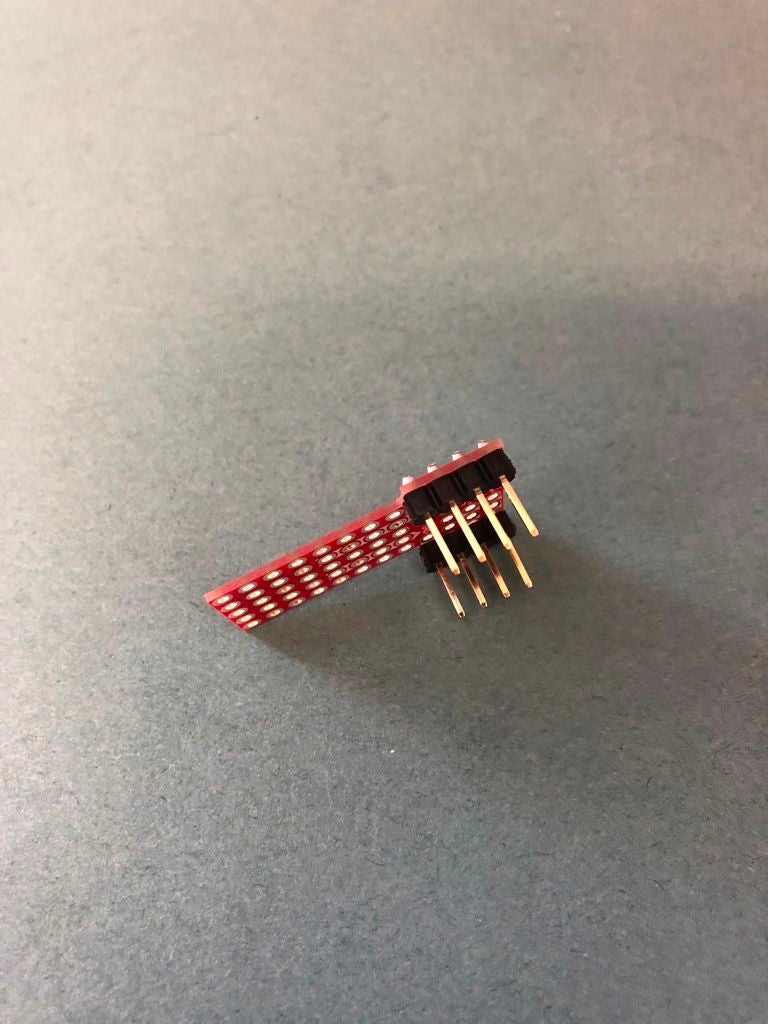
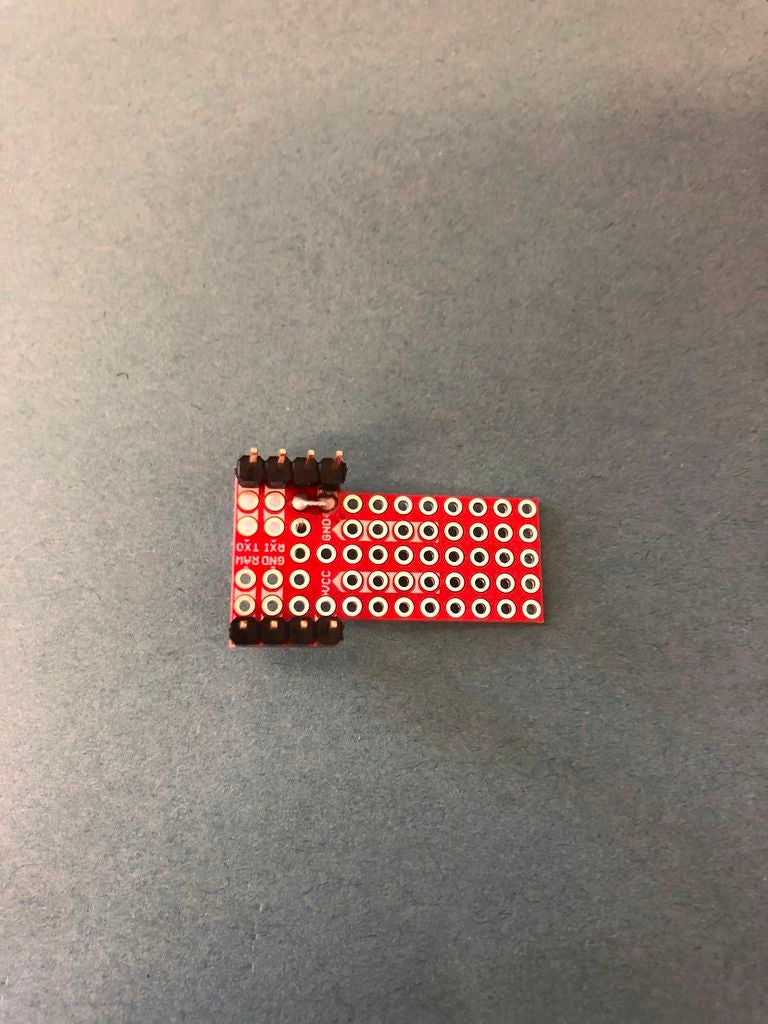
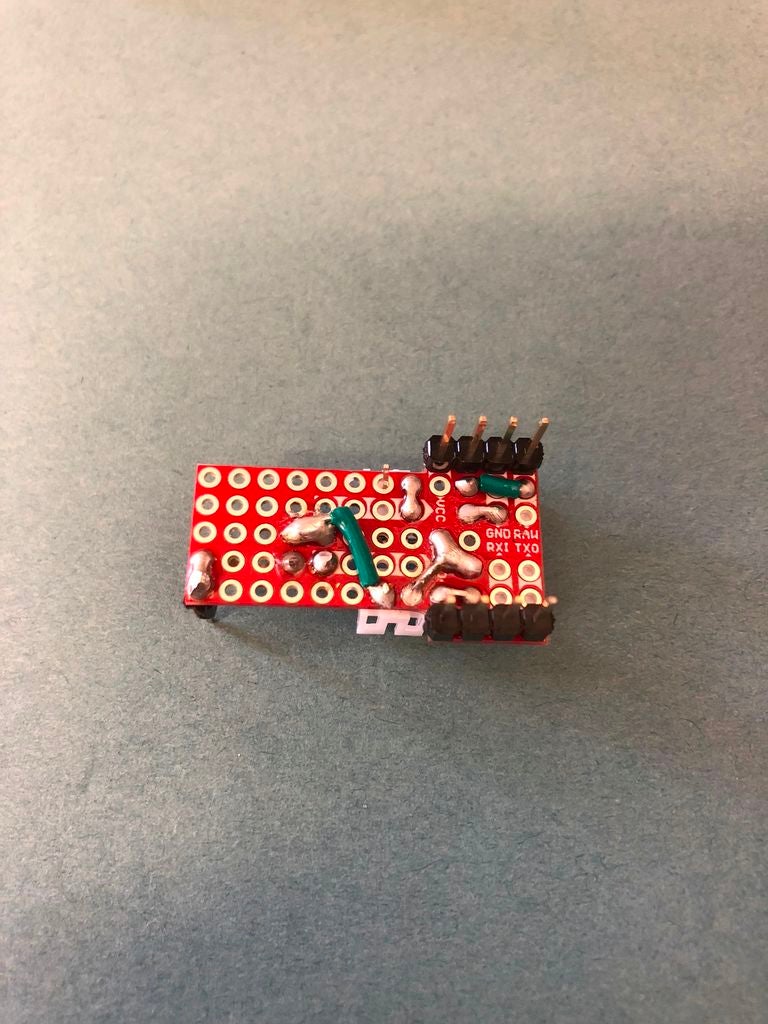
- 將8針母頭焊接到ProMini上。我從Raw-A0和TXO-5中放置了它(參見圖1,2) )
- 將6引腳直角接頭焊接到垂直于8引腳接頭的位置(來自BLK-GRN)(見圖1,2)
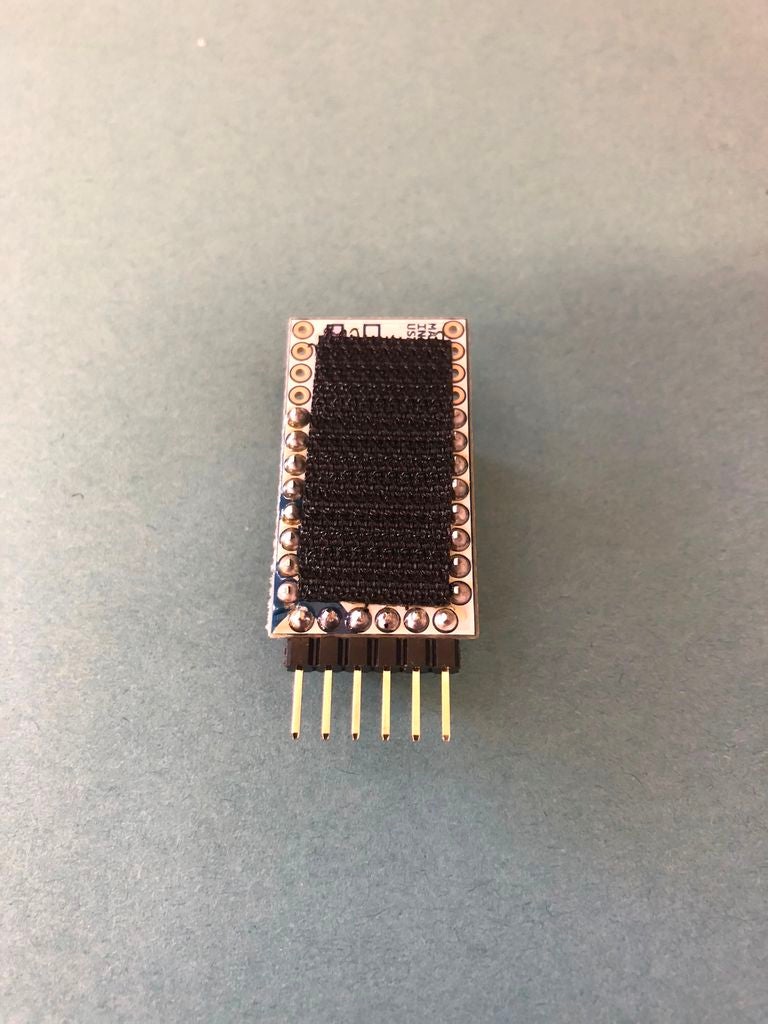
- 將維可牢尼龍搭扣(鉤子)粘在ProMini背面(見圖3)
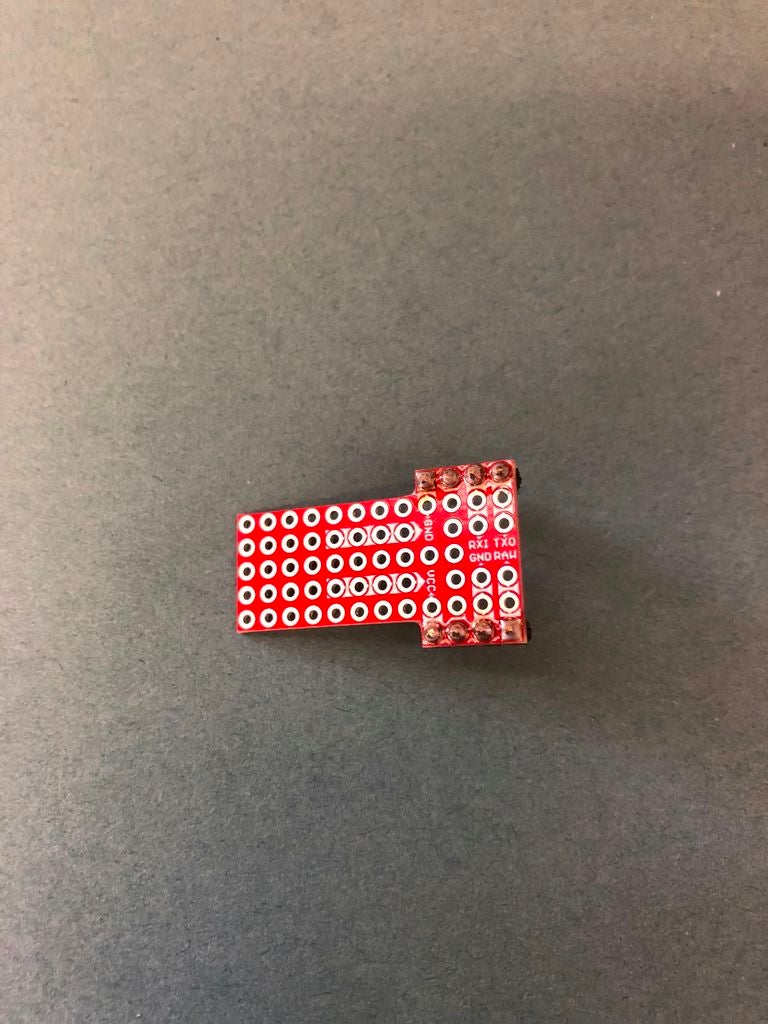
- 將4針接頭焊接到Protoshield的翅膀上。確保將電路板朝向正確的方向(參見圖4-6)
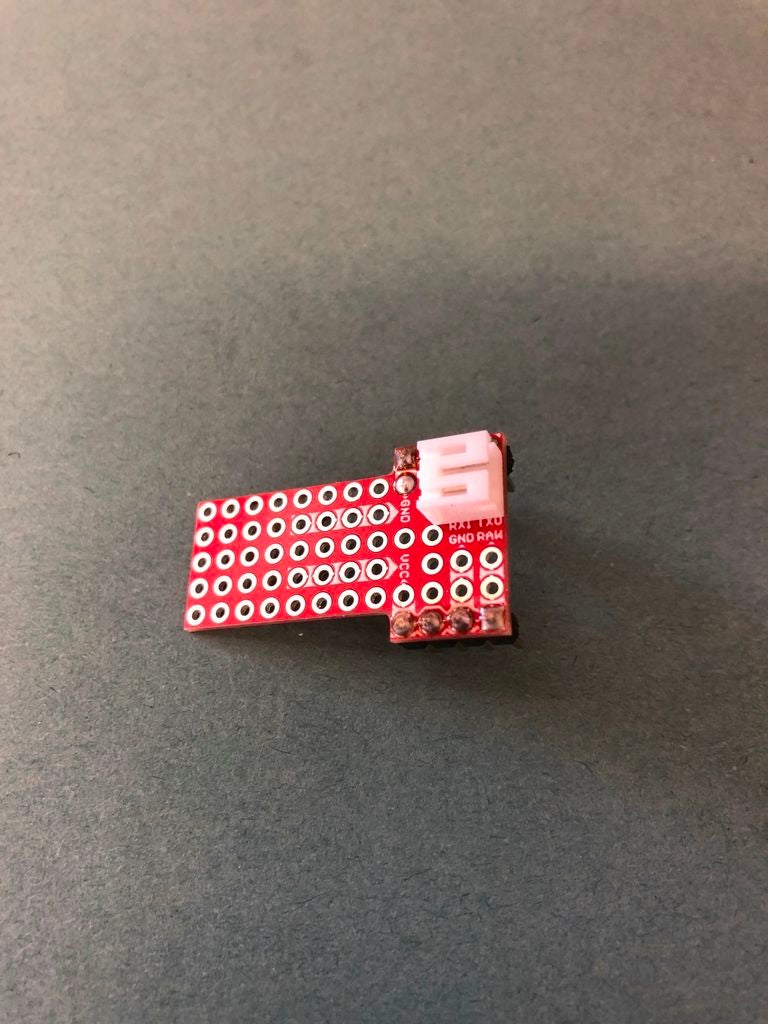
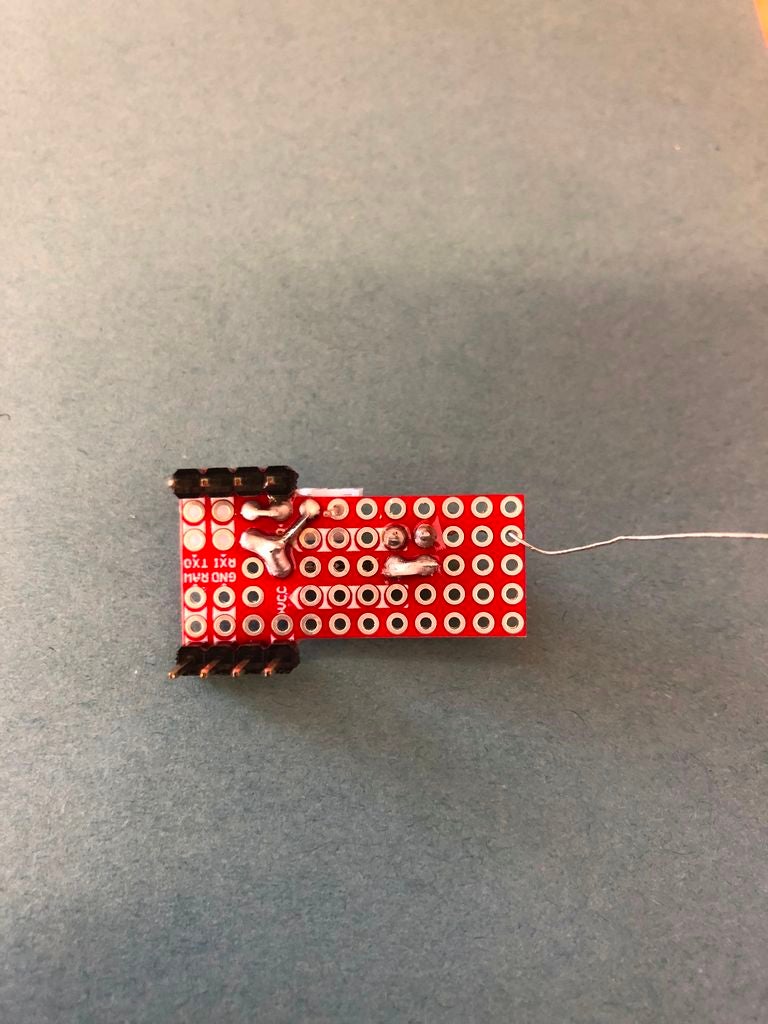
- 將2針JST插座的支腳彎曲90度準(zhǔn)備焊接(見圖7-9)
- 將JST插座GND引腳放置并焊接到位。 (這將需要在插入電路板后再次彎曲插針;參見圖10,11)
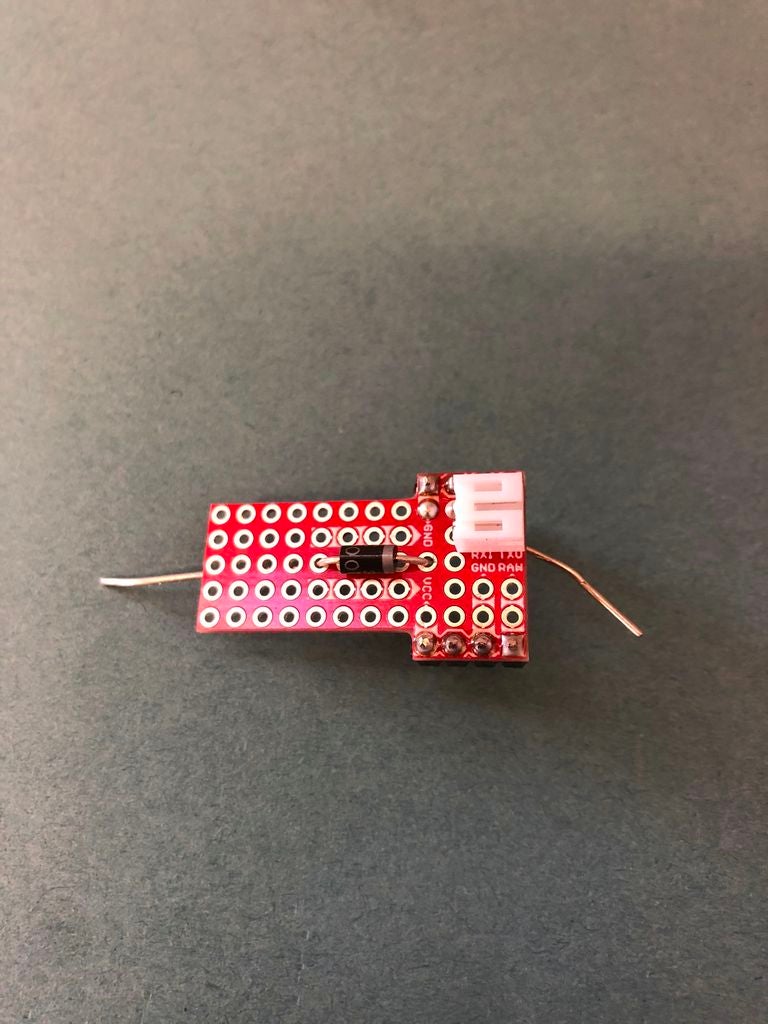
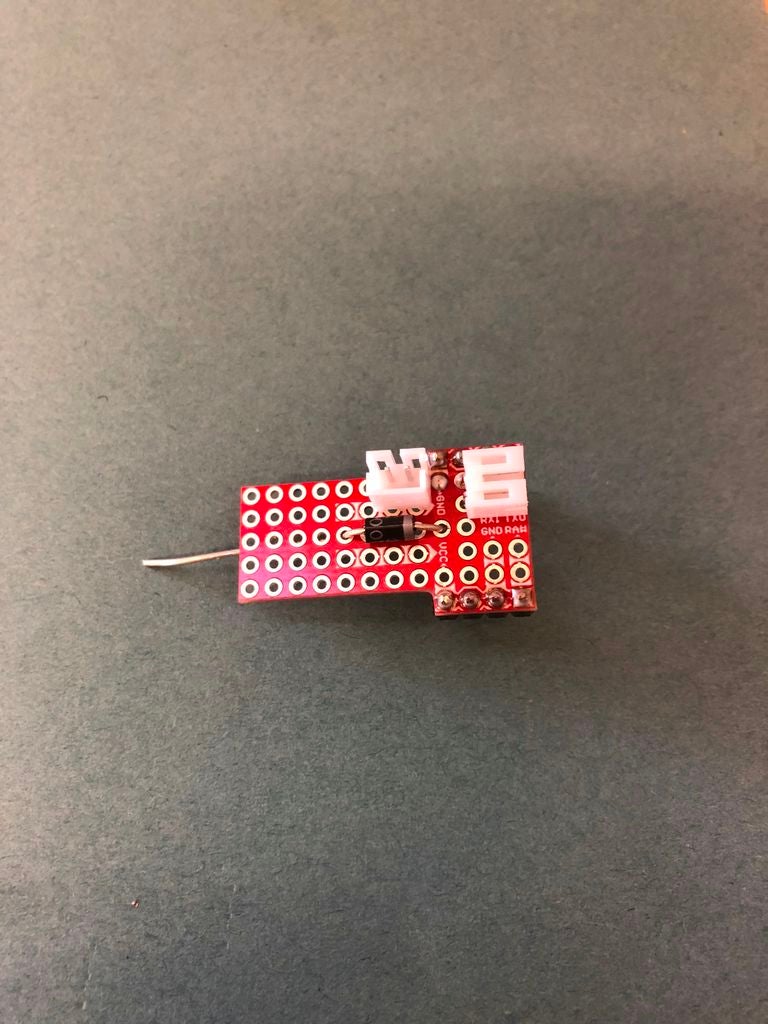
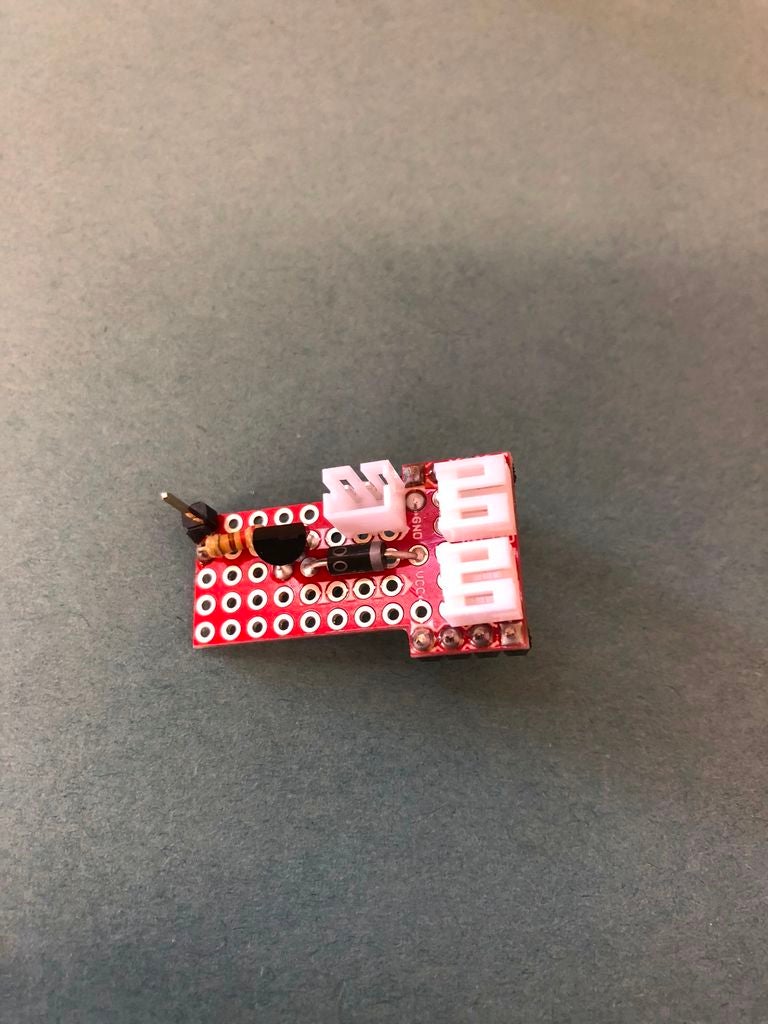
- 根據(jù)圖12-14中的焊接準(zhǔn)備插入二極管并彎曲/剪斷支腳
- 根據(jù)圖15,16
插入另一個2針JST插座并彎曲一條腿
- 確保所有三個引腳都形成一個焊點,然后焊接(參見圖17)
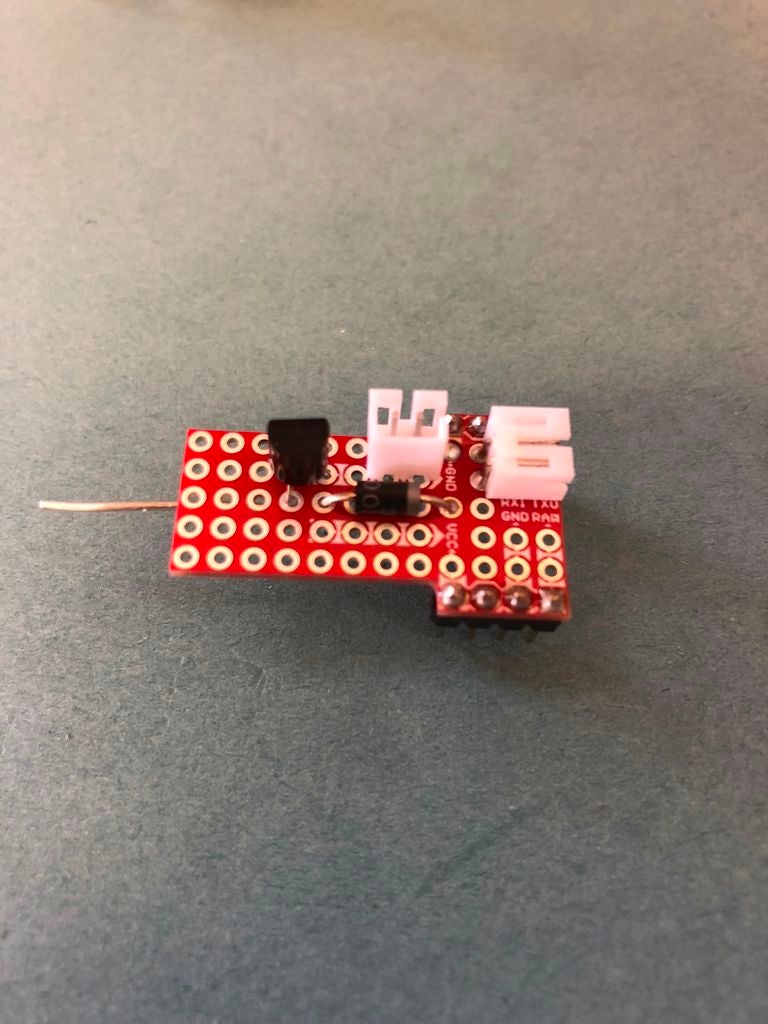
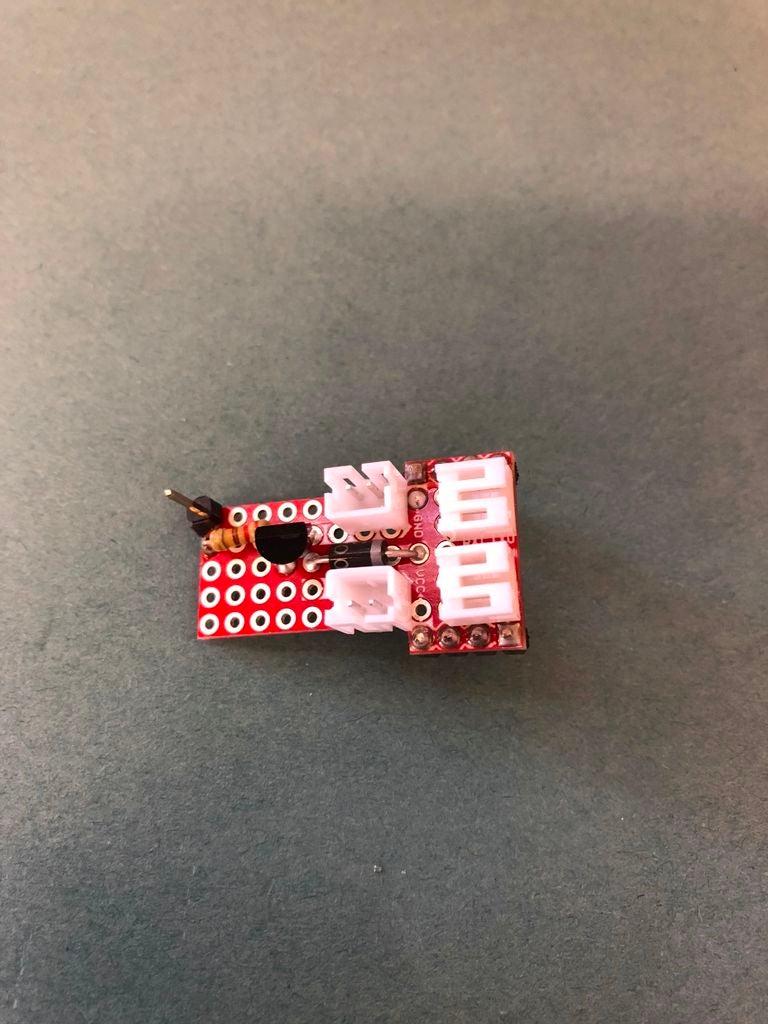
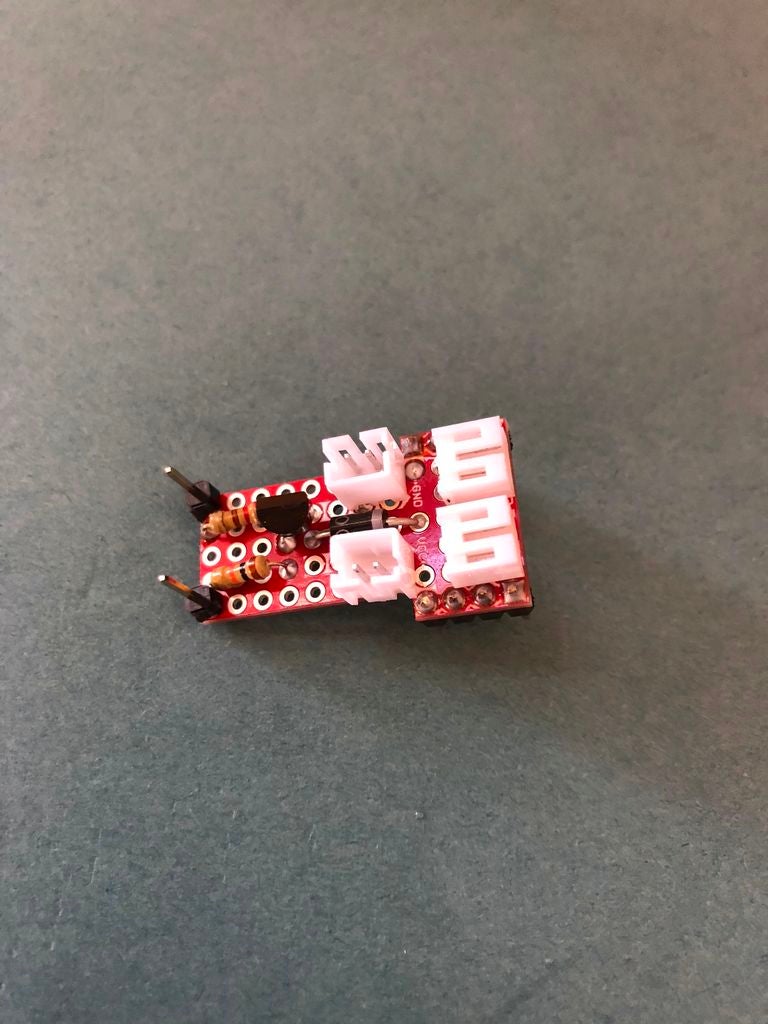
- 將晶體管的發(fā)射極引腳略微偏離元件的平面,準(zhǔn)備放置電路板(見圖18)
- 根據(jù)圖19,20放置晶體管
- 根據(jù)圖21彎曲剩余的二極管支腳和晶體管發(fā)射極引腳。確保它們產(chǎn)生一個焊料點焊和焊接在一起(見圖22)
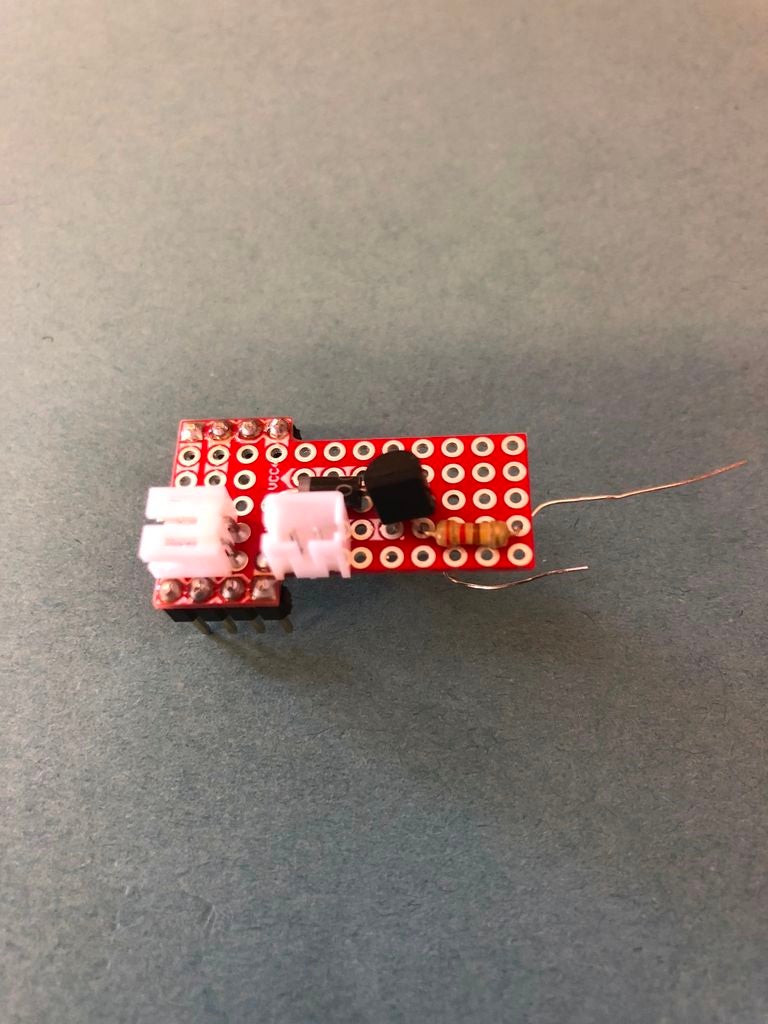
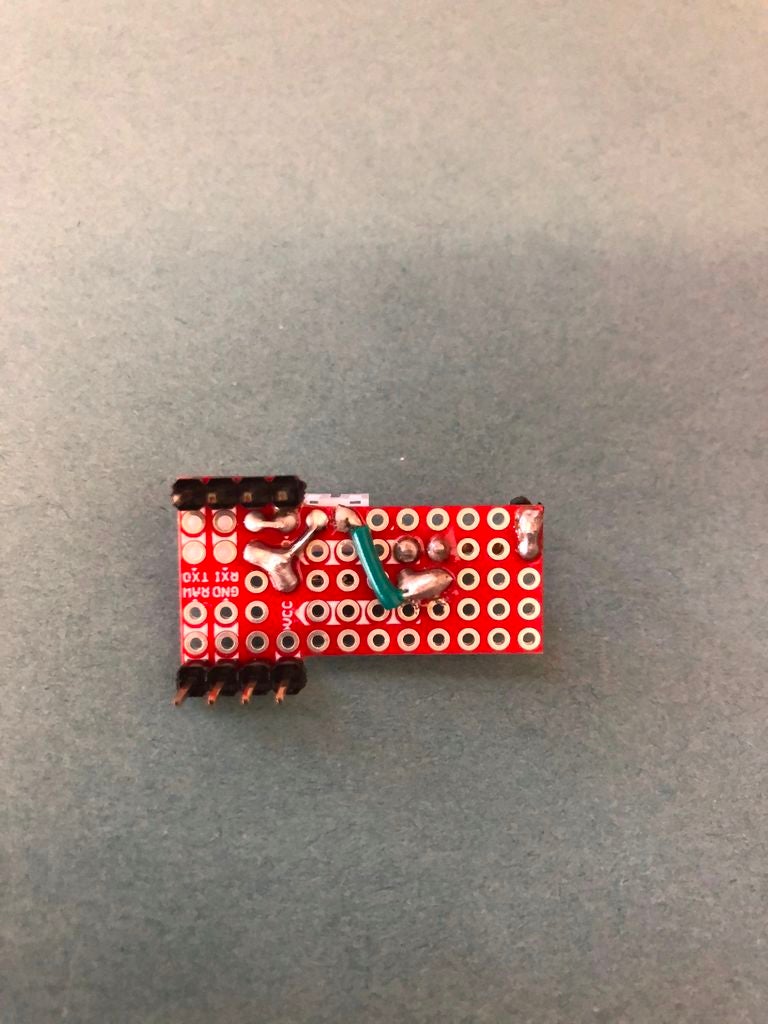
- 將220歐姆電阻放在電路板上,并將一個電阻支腳和晶體管基極引腳焊接在一起。此外,將剩余的晶體管集電極引腳焊接到GND(參見圖23-25)
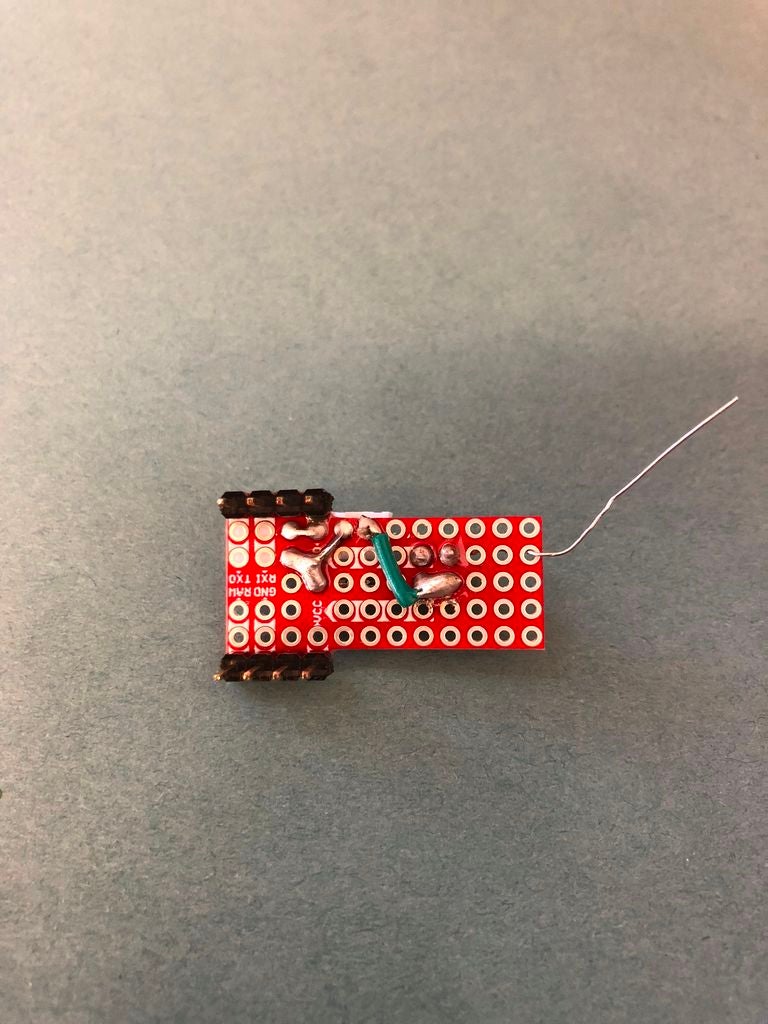
- 切割一根實芯線并焊接到位,將二極管/發(fā)射極引腳焊點連接到剩余的支腳上。 JST容器(見圖26,27)
- 將1針插頭放在電路板上并焊接到220歐姆電阻器的剩余支腳上(見圖28-30)
- 將另一個JST插座的支腳彎曲90度并放置根據(jù)圖31在電路板上
- 再次彎曲JST插座GND引腳并焊接到位(參見圖32)
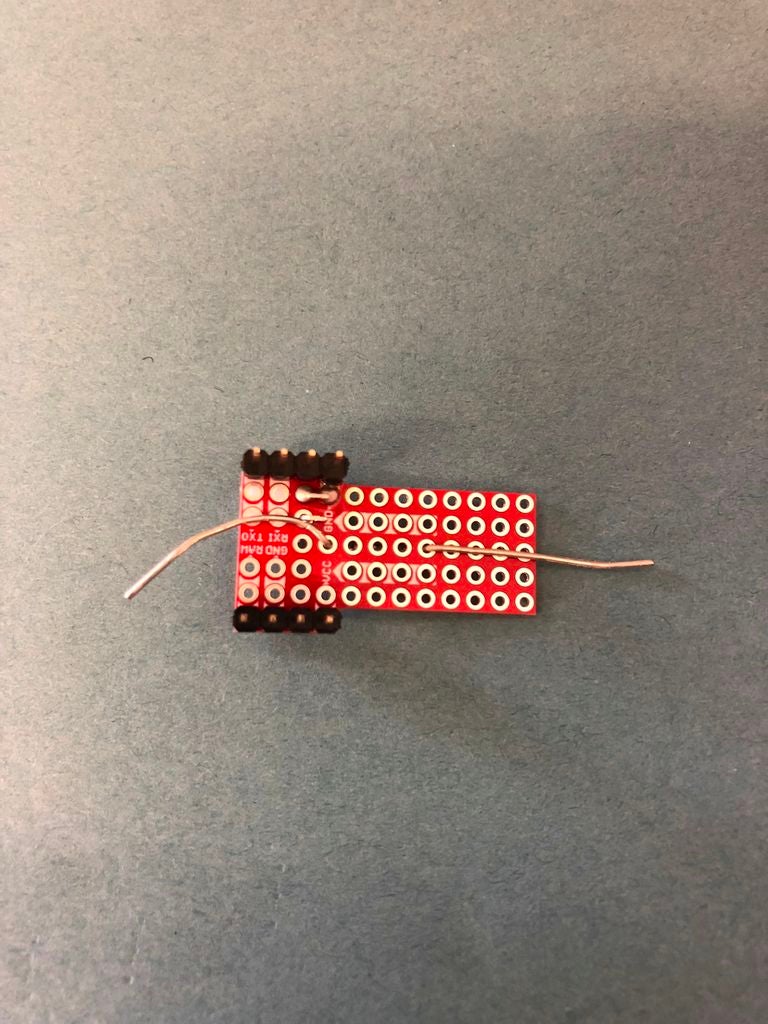
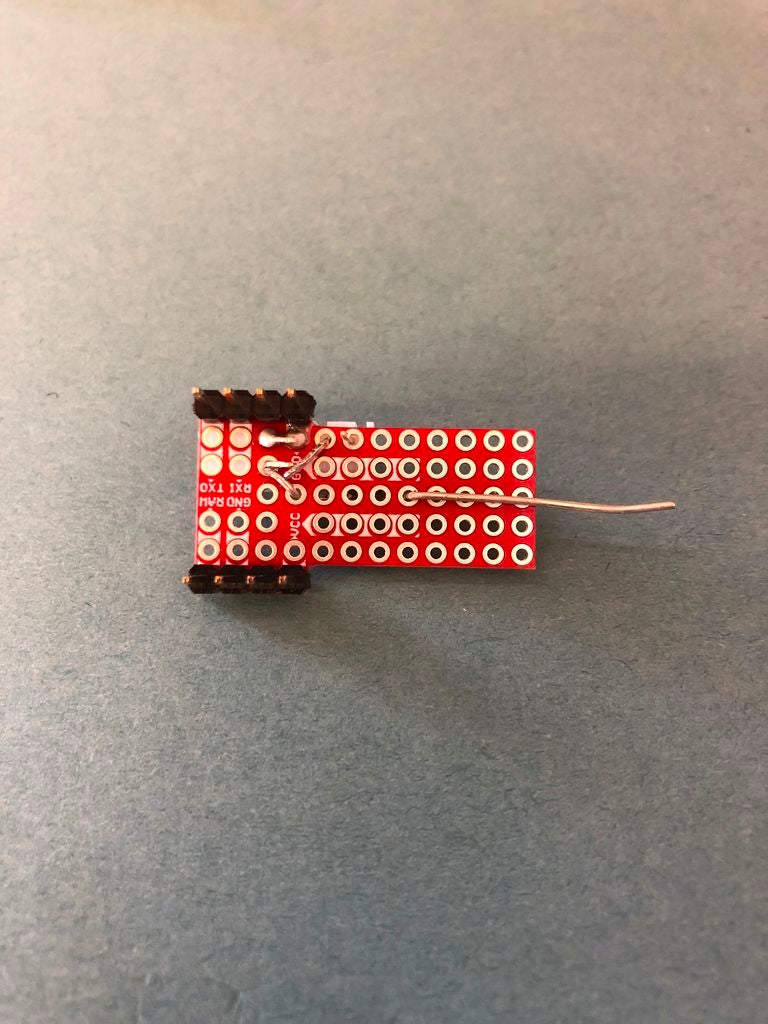
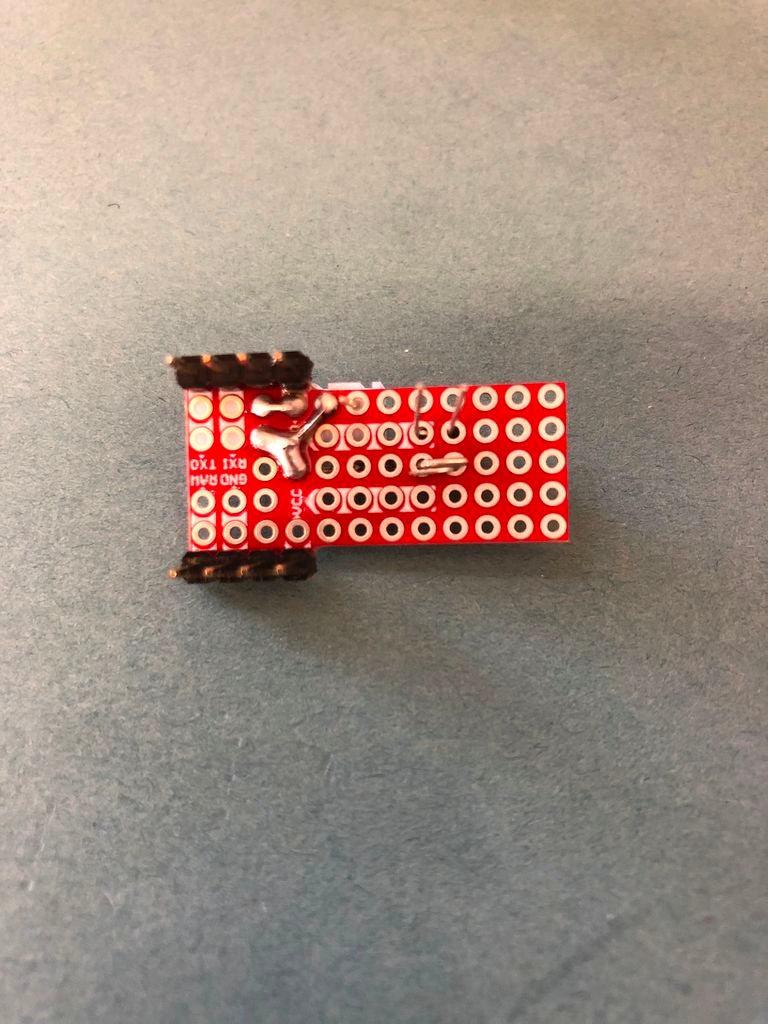
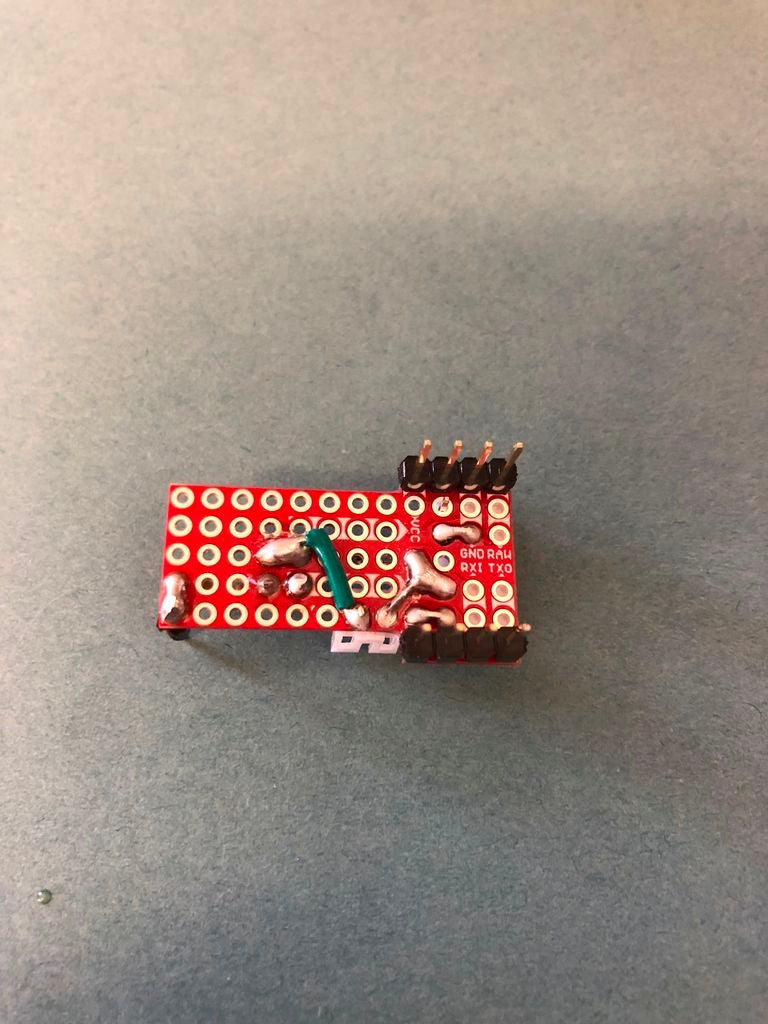
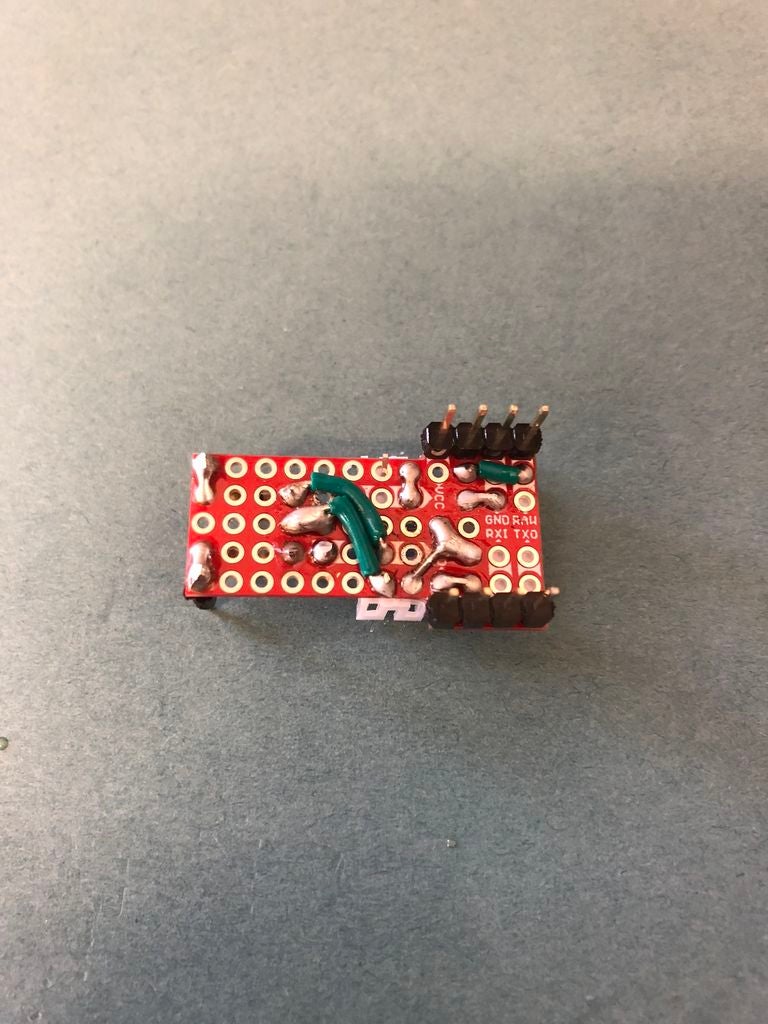
- 切割一根實心芯線并焊接到位在新放置的JST插座的剩余引腳和RAW之間(見圖33,34)
- 將最后一個JST插座插入電路板,并將其中一個引腳彎曲到VCC上并焊接到位(參見圖35,36)
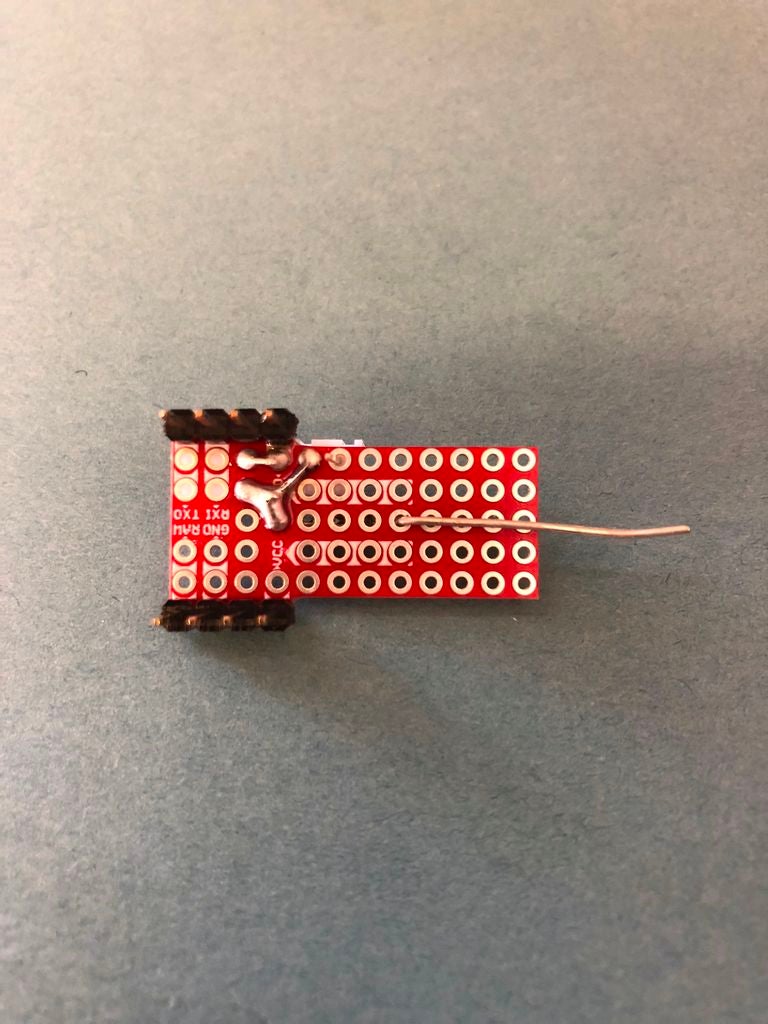
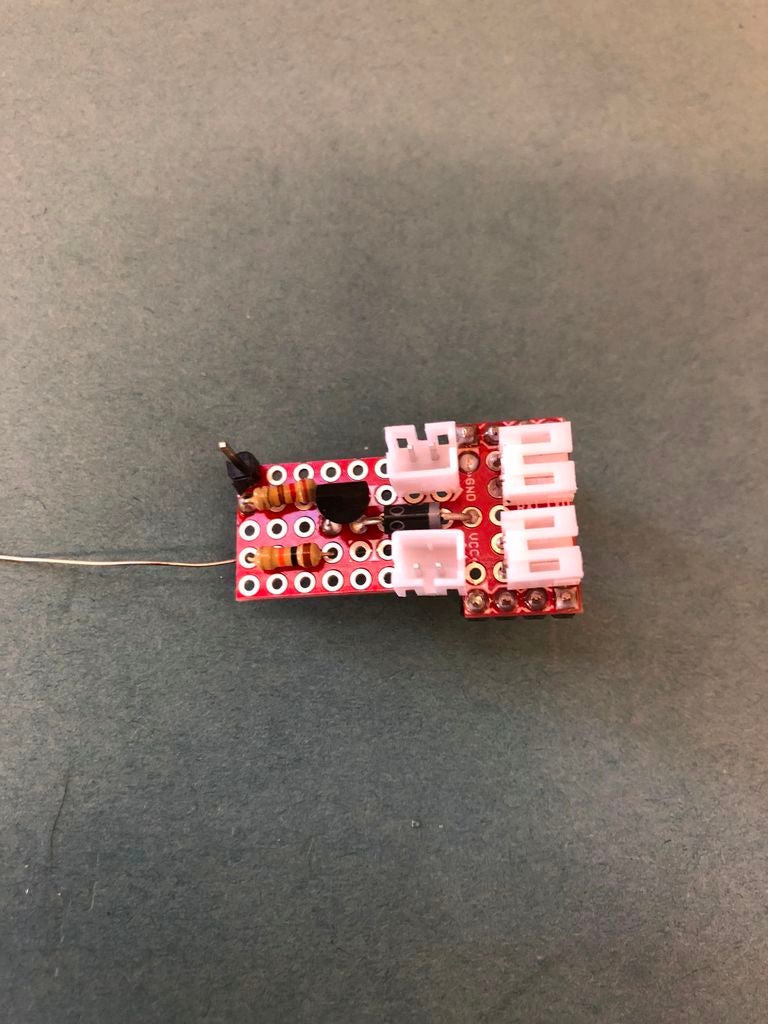
- 根據(jù)圖37將10k歐姆電阻放在電路板上
- 在新放置的電阻器和GND的一條腿之間切割一根實芯線并焊接到位(見圖38,39)
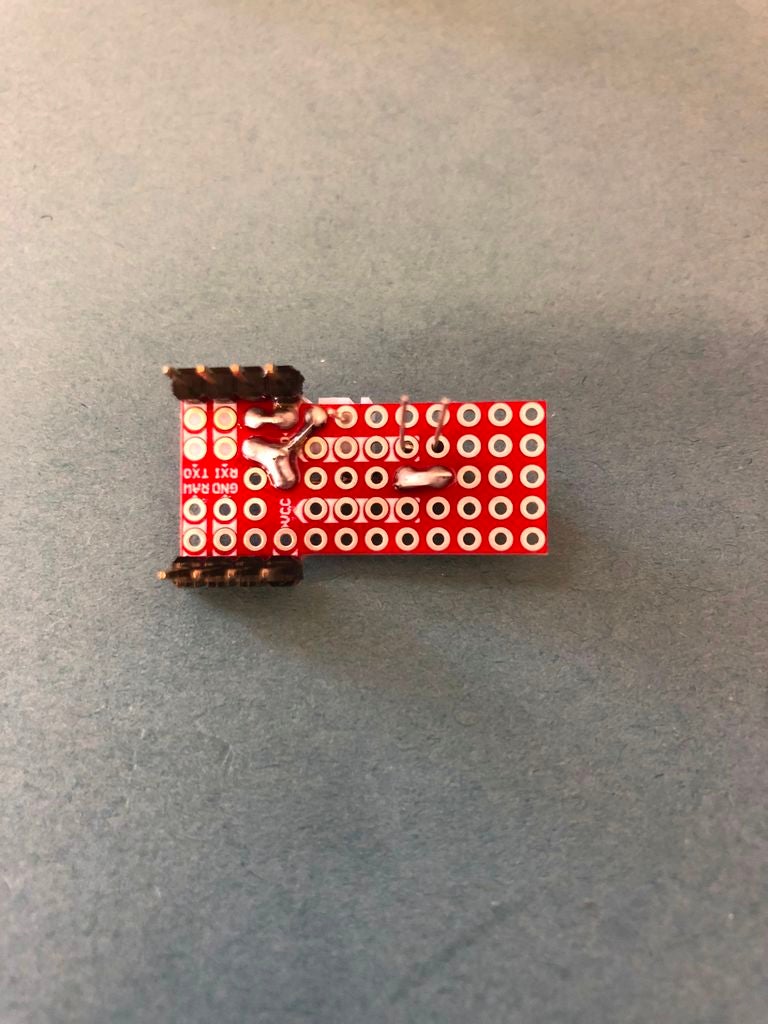
- 將另一個1針插頭插入電路板上焊接到10k電阻器的剩余支路上(參見圖40,41)
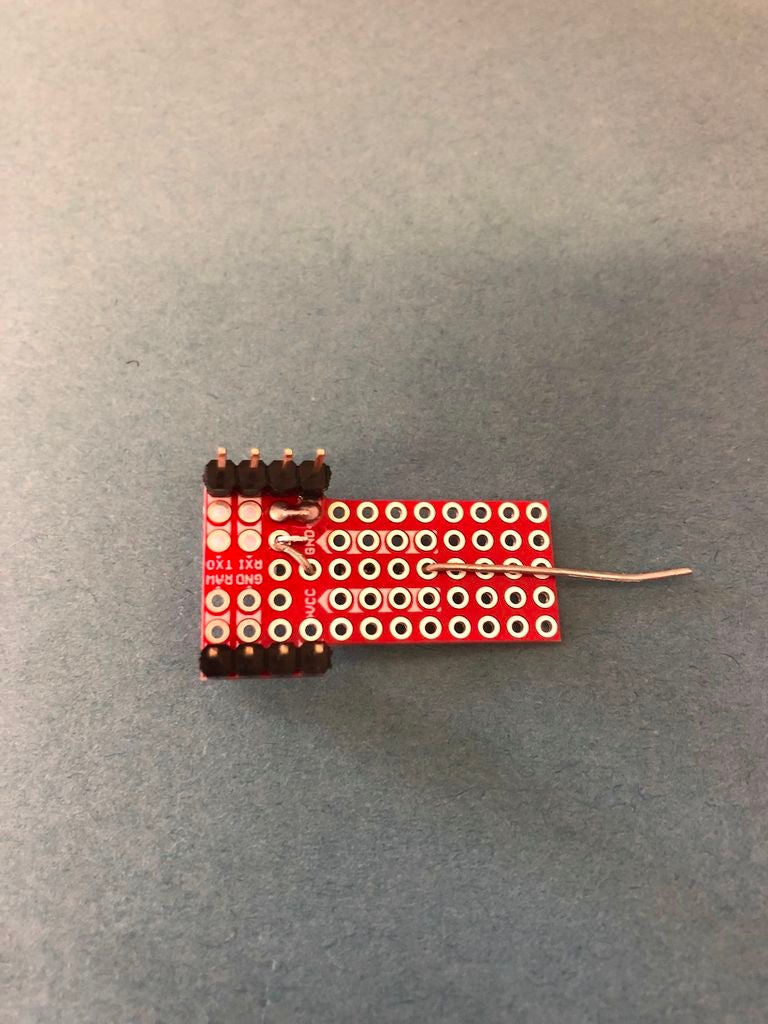
- 切割最后一根實心芯線并在最近放置的JST插座的剩余引腳和1引腳之間焊接接頭/10k電阻焊點(見圖42,43)
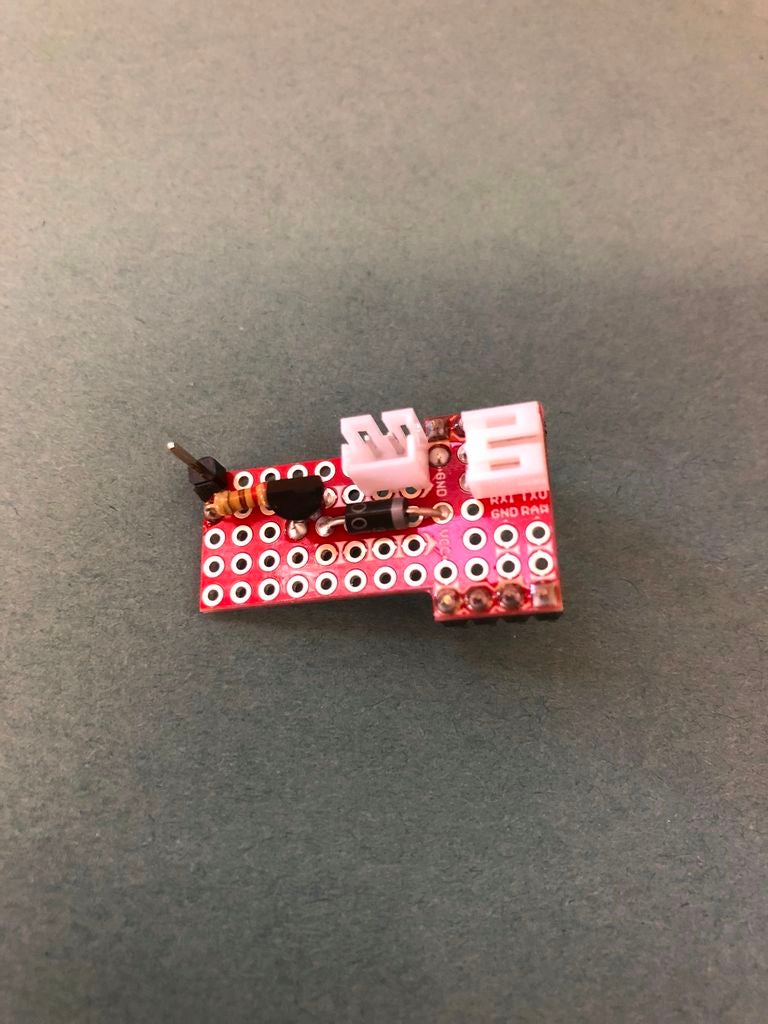
- 電路板已完成。..。..圖44!
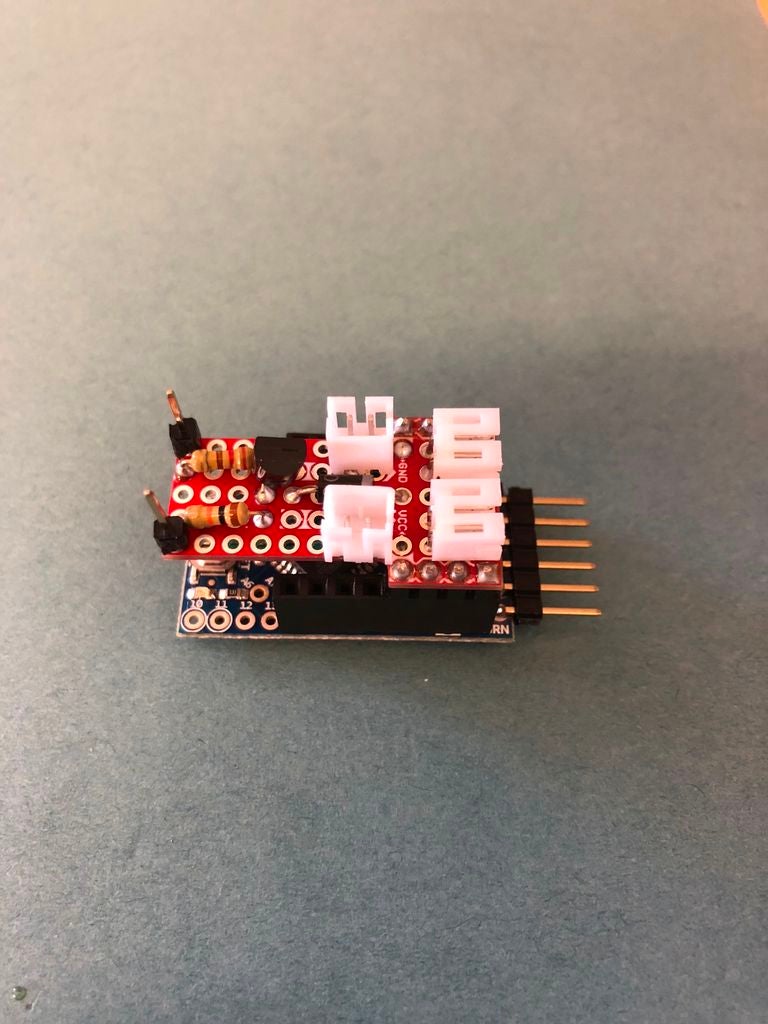
- 插入3“母對公跳線導(dǎo)線(左側(cè):晶須1針至A0;右側(cè):5至電機(jī)1針)(見圖45,46)
- 再制造7個晶須微處理器組件!
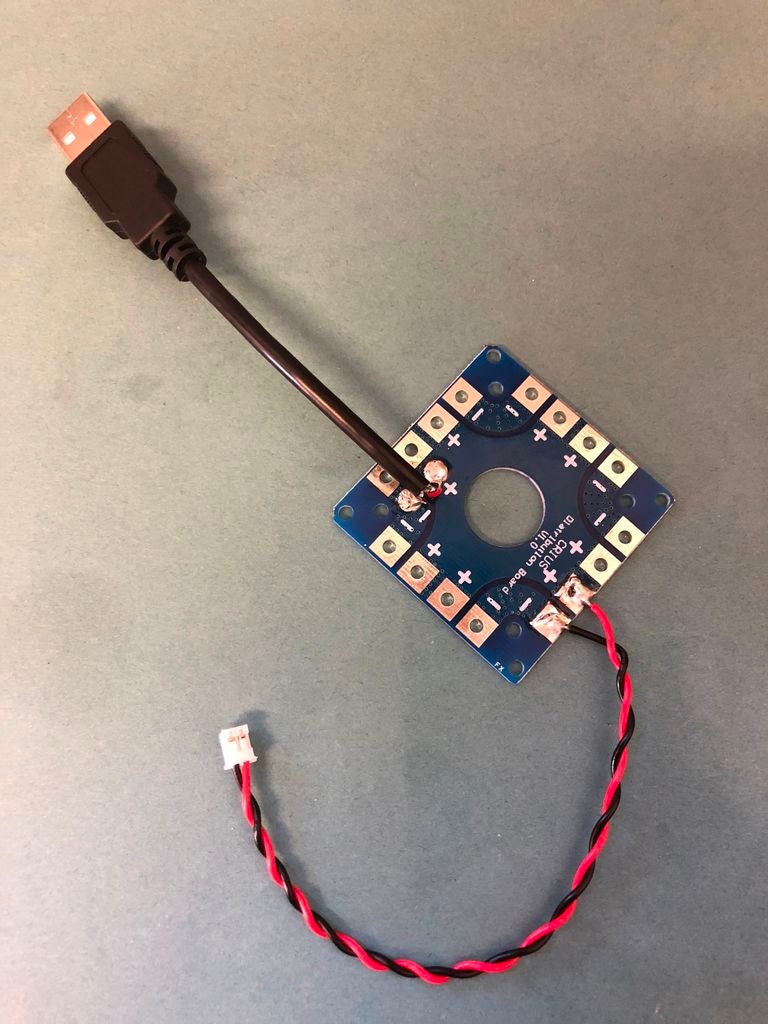
- 將2針JST插頭線擰在一起(參見圖47,48)
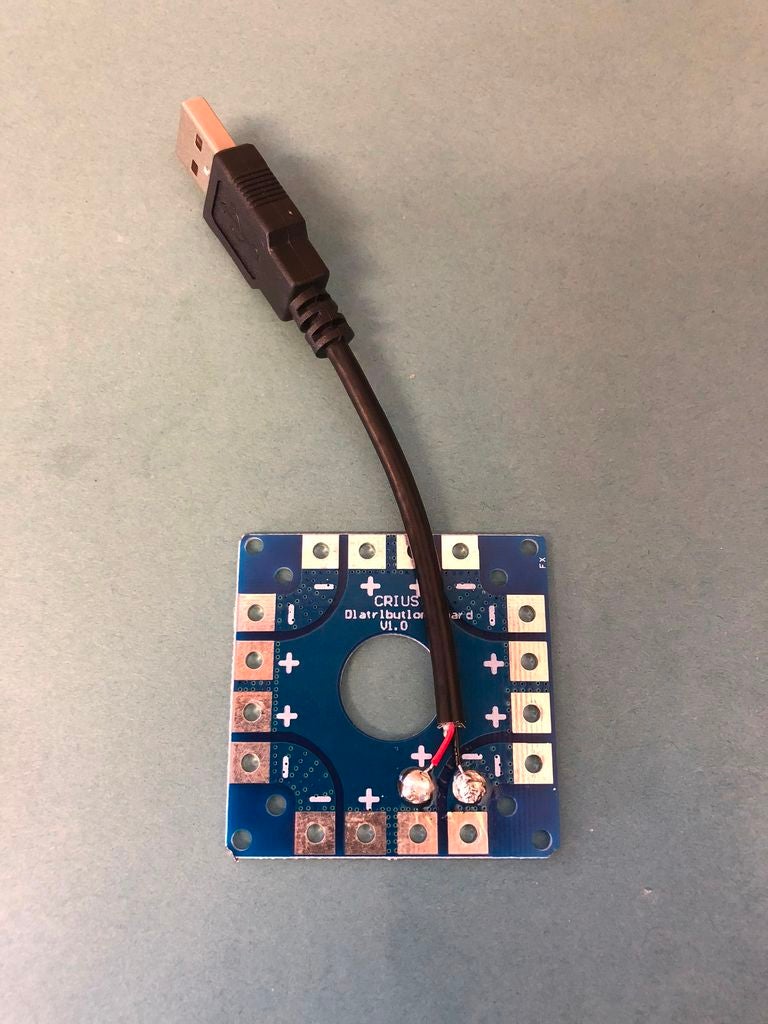
- 將焊接器兼容的USB-A插頭插入電源發(fā)射板輸入端(參見圖49)
- 焊錫8將JST插頭線組件擰到電源發(fā)布板輸出上(參見圖50)
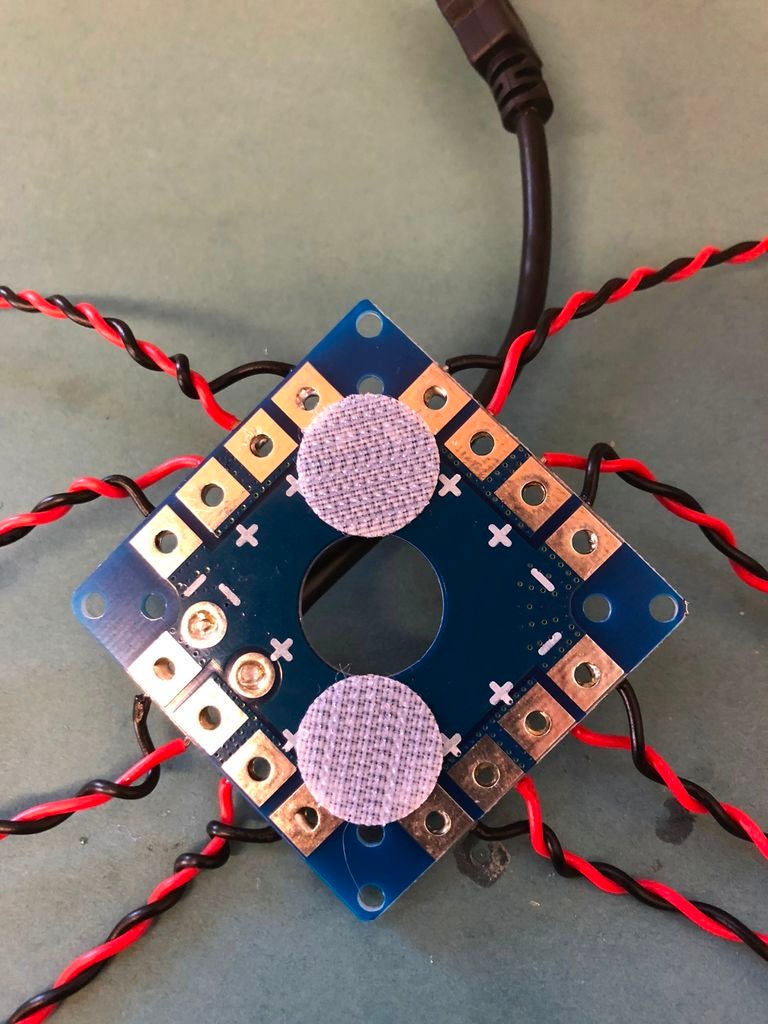
- 將維可牢尼龍搭扣(掛鉤側(cè))粘貼到電源發(fā)布板的背面(見圖51)
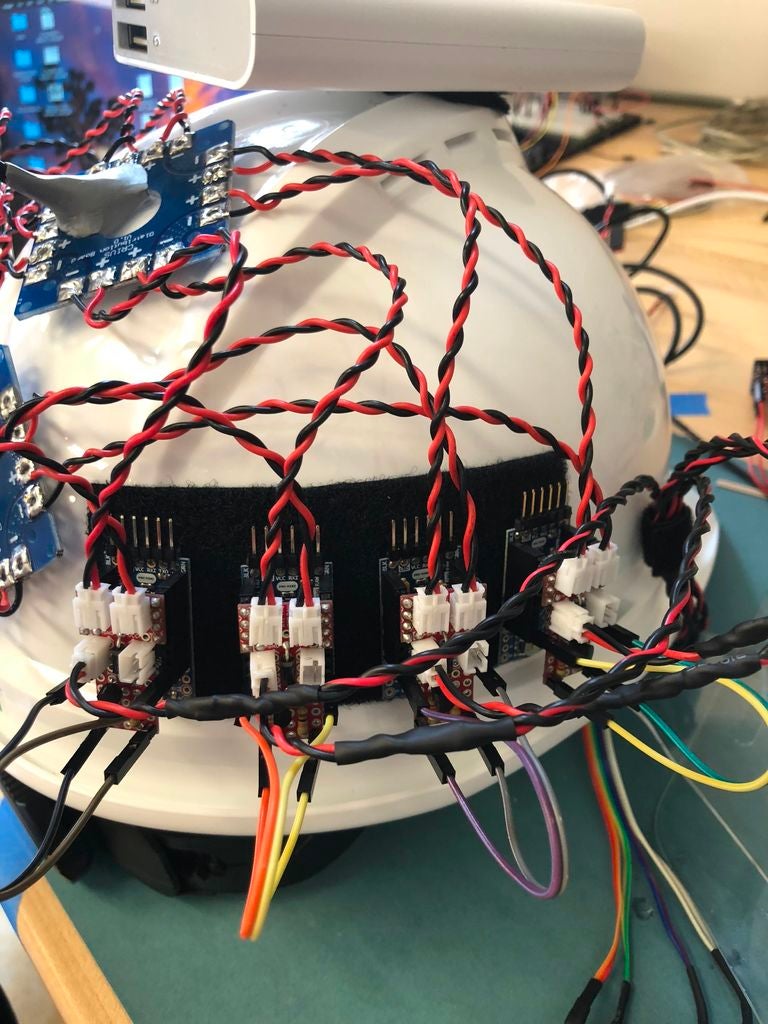
- 制作另一個電源發(fā)電板組件(圖52顯示了頭盔上的電源發(fā)電板)
- 將四個微處理器連接到頭盔兩側(cè)的每個維可牢尼龍搭扣帶并插入所有輸入/輸出(見圖53,54)
步驟5:實現(xiàn)代碼
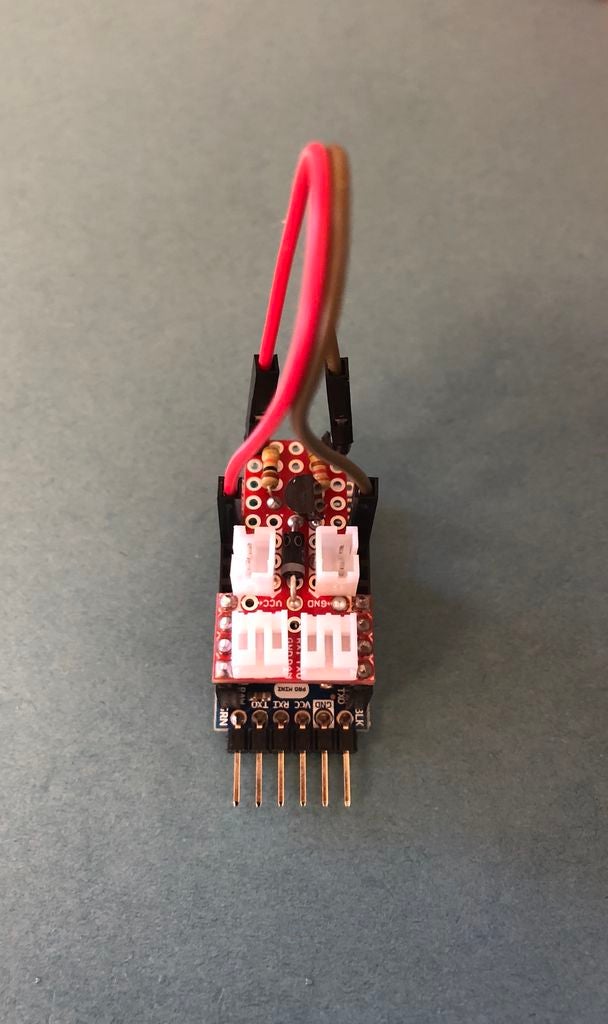
好的,現(xiàn)在是時候上傳代碼了。在您準(zhǔn)備好震撼世界之前,您需要調(diào)整一些東西(在每個微處理器上)。此外,由于我們正在使用ProMini,您需要一個FTDI分線板才能將微處理器連接到您的計算機(jī)。
- 請記住,這些說明需要在每個晶須上進(jìn)行單獨使用微處理器。
- 首先,使用萬用表測量VCC輸出電壓和10k電阻兩端的電阻。將這些值輸入到代碼中各自的位置。
- 然后,仔細(xì)檢查所有其他變量是否設(shè)置為正確的輸入/輸出(例如,mtr,flexADC等)
- 然后,啟動電機(jī)電路(插入運行到電機(jī)的電源發(fā)布板),將FTDI板(連接到USB/計算機(jī))插入第一個ProMini,然后上傳代碼。
- 一旦啟動并運行,您將在串行監(jiān)視器中看到阻力,彎曲和前向強度將打印。現(xiàn)在是時候校準(zhǔn)晶須了(每個晶須都是獨特的,基線電阻略有不同)。將STRAIGHT_RESISTANCE變量設(shè)置為基線電阻(即,未彎曲的晶須位置)打印的任何值。然后,將BEND_RESISTANCE變量設(shè)置為STRAIGHT_RESISTANCE + 30000.0。在原始代碼中,該變量旨在反映彎曲90度時的柔性傳感器電阻輸出。由于我們的晶須不能接近完整的90度彎曲(至少在典型情況下),因此在基線電阻上添加30000.0歐姆就可以了。盡管如此,請隨意將彎曲阻力設(shè)置為最適合您的應(yīng)用。如果你已經(jīng)正確設(shè)置了所有東西,那么你會看到當(dāng)胡須彎曲時,將打印0度(或多或少)的彎曲角度。一旦校準(zhǔn)了所有晶須單元,就可以從最后一個微處理器上斷開FTDI板,并給晶須電路加電(插入剩余的電源發(fā)射板上的晶須)。
只需回過代碼中的幾點:
- 一旦計算出電壓和電阻,就會執(zhí)行兩種不同的映射函數(shù)。第一個將電壓/電阻映射到彎曲角度(即60000.0歐姆 - 》 0.0度彎曲),第二個隨后將彎曲角度映射到電動機(jī)強度(即0.0度彎曲 - 》 30.0 PWM單位電動機(jī)強度)。您可能需要稍微調(diào)整第二個映射函數(shù)以使其恰到好處。彎曲參數(shù)最初設(shè)置為5.0和80.0,電機(jī)輸出參數(shù)設(shè)置為30.0和130.0。這些價值觀符合我的目的。低端小于5.0度的任何東西都會引起問題,因為傳感器在基線處波動大約+/- 3.0度。超過80.0的任何東西都是不必要的,因為傳感器很少彎曲超過這個角度。我使用的振動盤具有約40.0個PWM單位的閾值(即,直到輸出達(dá)到約40.0時才會明顯振動)。從30.0開始范圍有助于緩沖初始振動水平。我將上限設(shè)置為130.0,因為這個級別對于上層前額顯示強度來說足夠強烈。
- 我有意進(jìn)一步修改它,以便進(jìn)行連續(xù)的柔性傳感器自校準(zhǔn)。目前,當(dāng)使用晶須時,基線電阻可能會顯著波動超過初始設(shè)定值。這可能導(dǎo)致晶須靈敏度/功能降低。如果要實施連續(xù)自校準(zhǔn),那么有希望消除這種有害現(xiàn)象。目前,您可能需要不時重新校準(zhǔn)胡須。
第6步:訓(xùn)練和學(xué)習(xí)。..。..
-
可穿戴設(shè)備
+關(guān)注
關(guān)注
55文章
3847瀏覽量
168648
發(fā)布評論請先 登錄
芯原戴偉進(jìn):可穿戴設(shè)備是通往AI的入口
相約2025慕尼黑上海電子展,展望可穿戴設(shè)備未來發(fā)展!
固態(tài)鋰微型電池助力可穿戴設(shè)備電源方案突破
TRIZ理論解鎖可穿戴設(shè)備新體驗!

Meta拓展可穿戴設(shè)備領(lǐng)域,計劃推出Oakley智能眼鏡
2025年可穿戴設(shè)備市場預(yù)測樂觀

2024年可穿戴設(shè)備產(chǎn)業(yè)市場和熱點技術(shù)解析(下)

2024年可穿戴設(shè)備產(chǎn)業(yè)市場和熱點技術(shù)解析 (上)
可穿戴設(shè)備論壇順利召開!看可穿戴設(shè)備如何撬動萬億市場

可穿戴設(shè)備多個環(huán)節(jié)完成融資,XR芯片、顯示技術(shù)潛力待挖掘

用于可穿戴設(shè)備的感應(yīng)式觸摸按鈕

移動和可穿戴設(shè)備的觸覺實現(xiàn)考慮
可穿戴設(shè)備的電針活動應(yīng)用簡介
可穿戴設(shè)備上的血壓監(jiān)測申請簡介
國產(chǎn)高性能晶振/溫補晶振兼容SiTime用于可穿戴設(shè)備






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論