 植物分析無人機的制作圖解
植物分析無人機的制作圖解
第1步:飛行鏡頭
這是我的第二次試飛,直升機已經調整好并準備進行植物分析。我的動作相機上有一些板載錄音,你可以從鳥眼觀察我們美麗的環境。如果您想查看NDVI錄音,請轉到此指令的最后一步。不幸的是,我沒有時間全力以赴如何引導這個三旋翼的視頻,但我已經上傳了這個短飛行測試視頻。
第2步:必需的工具和部件
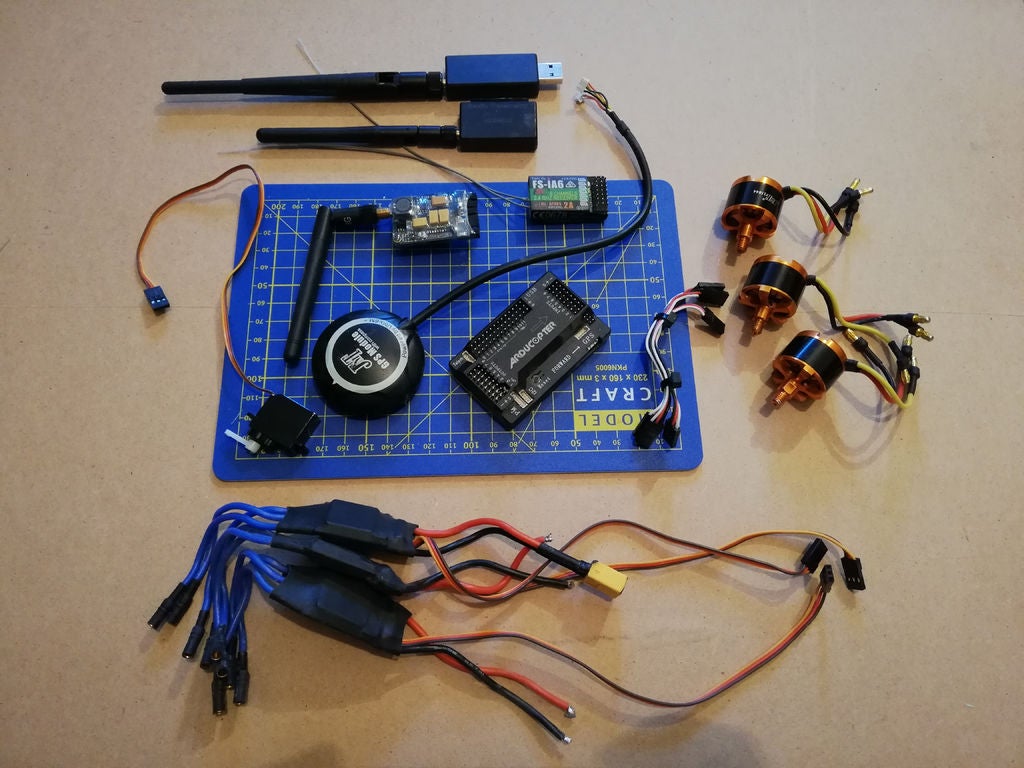





除了木質噴桿和噴漆外,我每個部分都有在我的工具箱里閑逛,所以這個項目的總成本對我來說大約是5美元,但我會嘗試找到eBay或Banggood鏈接到我使用的每個部分。我強烈建議您四處尋找零件,也許您可以獲得比我更好的價格。
工具
烙鐵
Dremel工具
3D打印機(我沒有,我的朋友幫幫我了)
切割工具
剪線鉗
超級膠水
Zip Ties (其中很多, 2種尺寸)
油漆噴涂(用你喜歡的顏色 - 我用黑色)
零件
ArduCopter飛行控制器(我使用舊的APM 2.8,但你應該選擇PixHawk或PIX Mini)
帶磁強計的GPS天線
MAVLink Telelemetry模塊(用于地面站通信)
6CH接收器+發射器
視頻發射器
伺服電機(扭矩至少1.5kg)
10“螺旋槳(2 CCW,1 CW +額外更換)
3 30A SimonK E. SCs (電子速度控制器) + 3 920kv電機
3S電池5.2Ah
覆盆子Pi Zero W + NoIR PiCamera (帶有infrablue過濾器)
2條電池帶
振動阻尼安裝座
1.2cm方形木制吊桿(我買了一根1.2米長的桿)
2-3mm厚木質板材
動作相機(我使用了4k功能的GoPro克隆 - SJCAM 5000x)
這些是我用于我的部件無人機,隨意根據自己的喜好進行修改。如果你不確定要使用什么,請發表評論,我會盡力幫助你。注意:我使用已停產的APM板作為飛行控制器,因為我有一個備用。飛得很好,但是這個主板不再受支持,所以你應該得到另一個與ArduCopter兼容的飛行控制器,以實現出色的GPS功能。
第3步:剪切框架

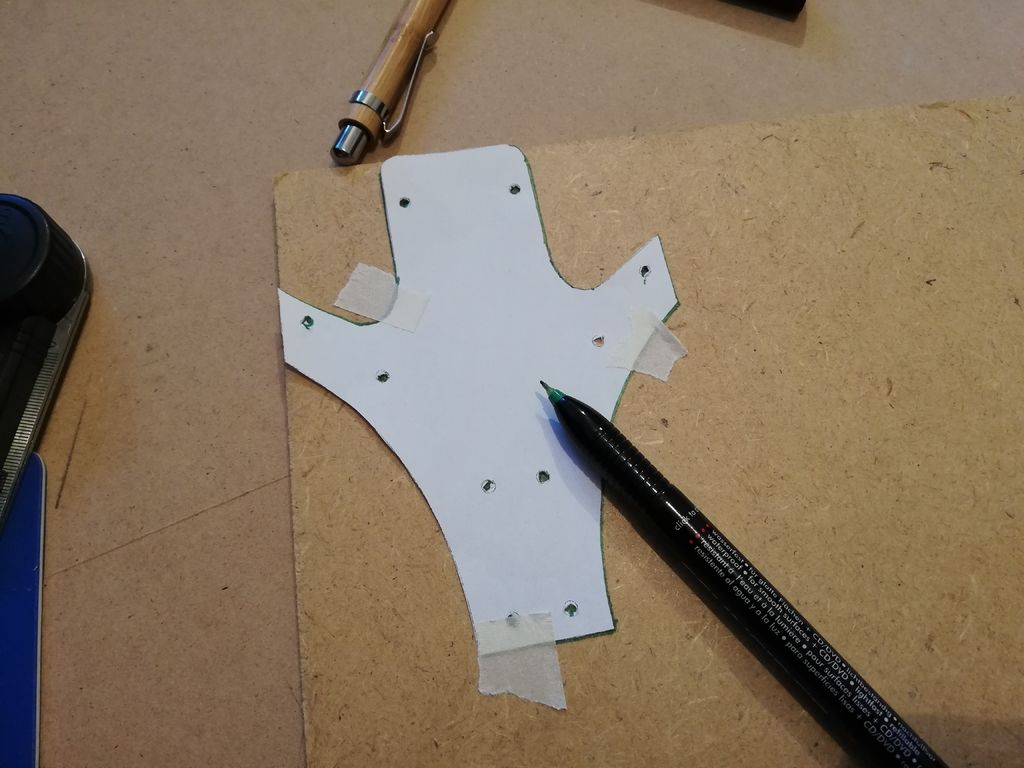


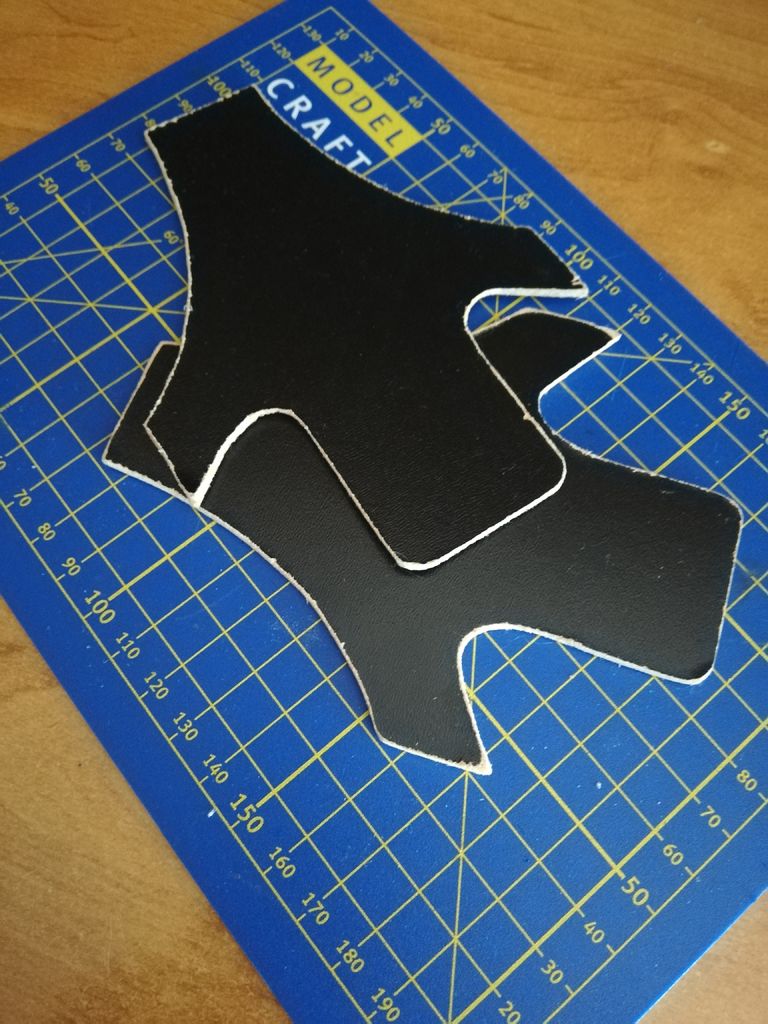

下載 frame.pdf 文件,打印并剪切。檢查打印尺寸是否正確,然后用鋼筆在木板上標記形狀和孔。使用鋸切割框架并用3mm鉆頭鉆孔。你只需要其中兩個,我只做了4個作為備件。
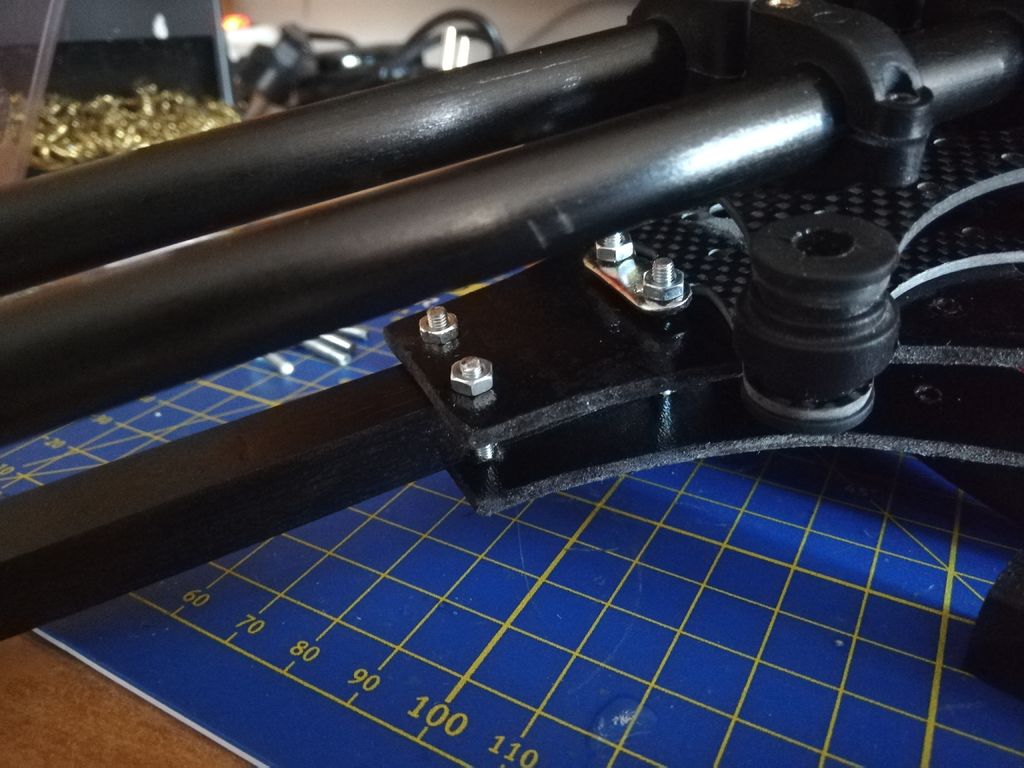
第4步:組裝框架
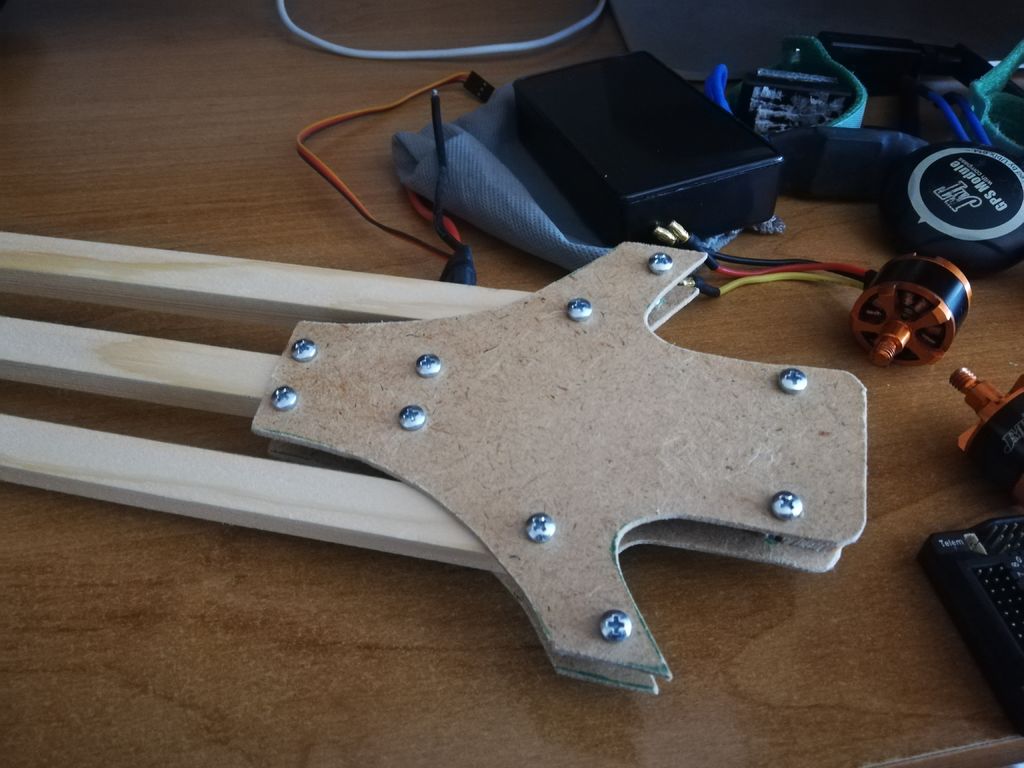
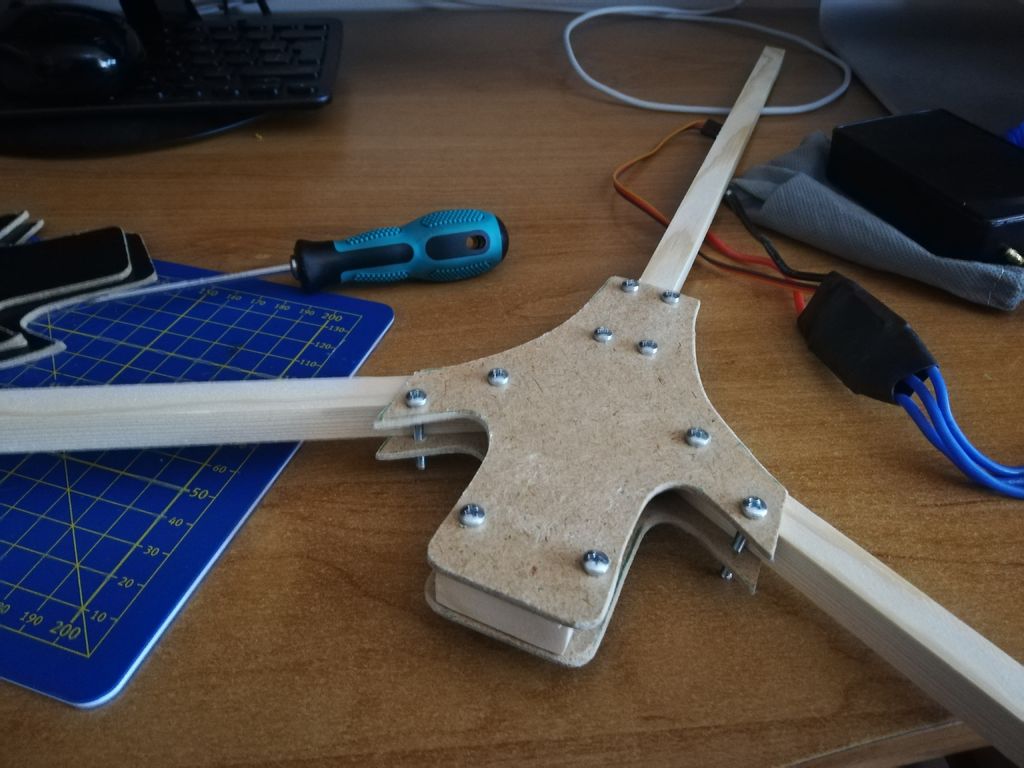
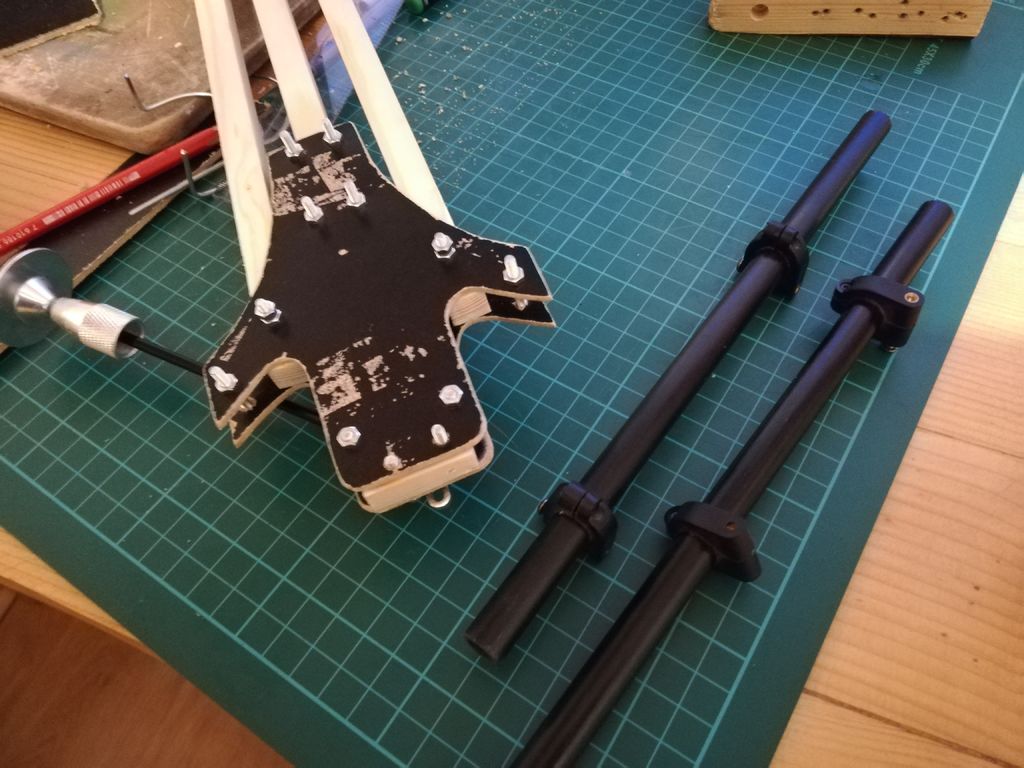

我使用3毫米螺釘和螺母來組裝框架。我將每個吊桿切成35厘米長,并將3厘米長的吊桿留在框架的前部。不要過度擰緊關節,但要確保有足夠的摩擦力,以免手臂折疊。這是一個非常聰明的設計,我撞了兩次,沒有任何東西只折回來。
步驟5:為電機鉆孔

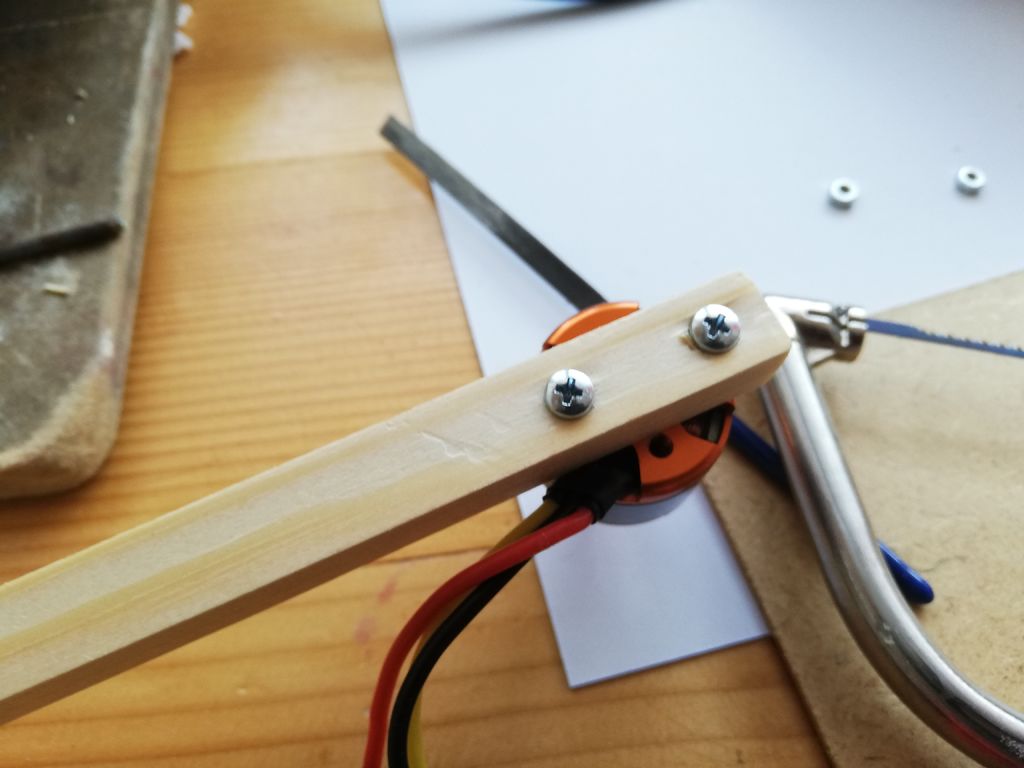
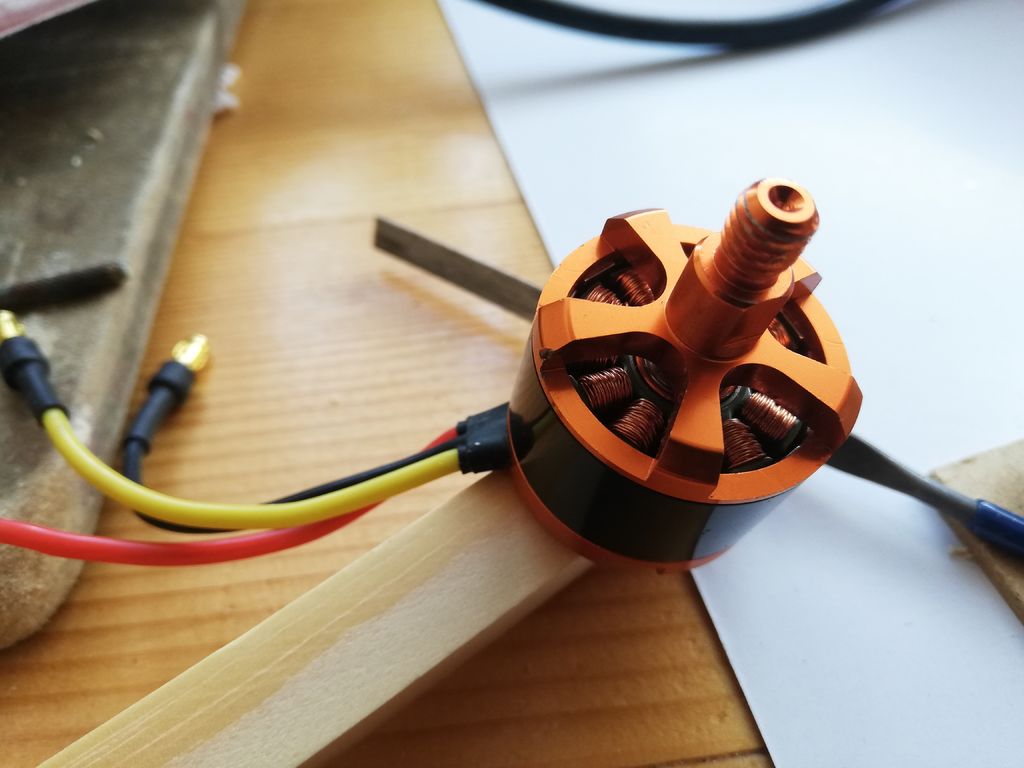


檢查電機螺絲的尺寸和它們之間的距離,然后在左右木臂上鉆兩個孔。我不得不在手臂上鉆一個5毫米深,8毫米寬的孔,這樣軸就有足夠的旋轉空間。用砂紙去除那些小碎片并吹掉灰塵。您不希望電機中有任何灰塵,因為這可能會導致不必要的摩擦和熱量。
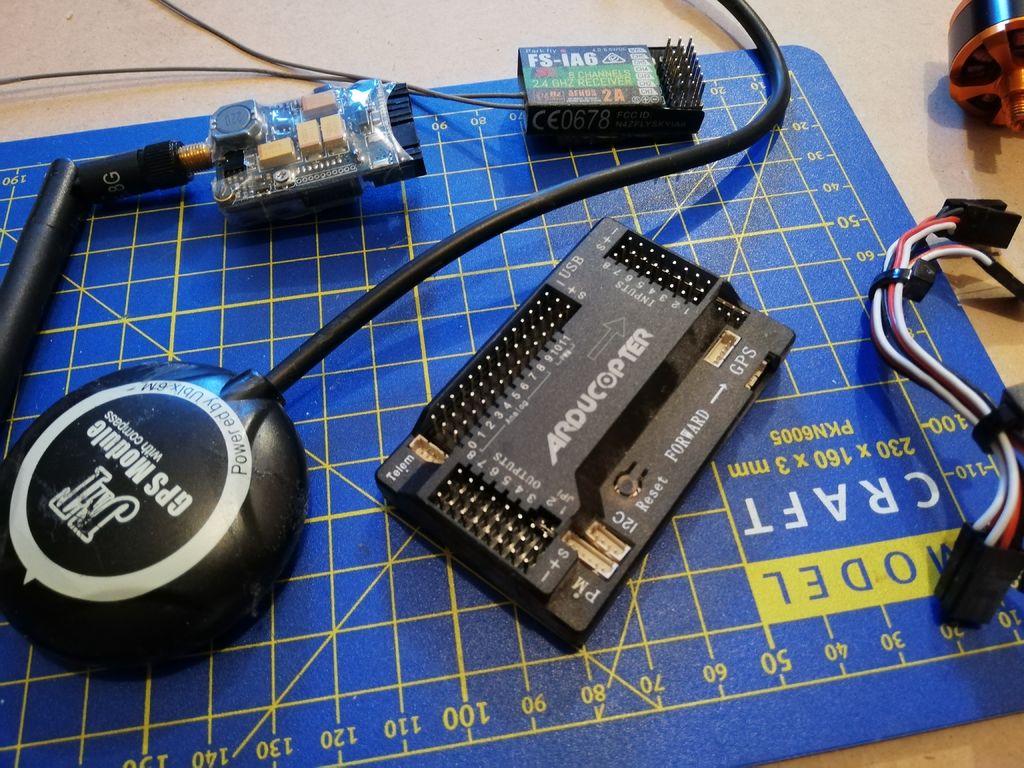
第6步:折疊GPS裝載


我不得不為我的GPS天線鉆出額外的孔,以便更好地適應。你應該把你的羅盤放高,這樣它就不會干擾電機和電線的磁場。這是一個簡單的折疊天線,可以幫助我保持設置盡可能緊湊。
第7步:繪制框架



現在你必須擰下一切并完成油漆工作。我最終選擇了這種啞光深黑色噴霧。我將零件連接在一個螺紋上并簡單地涂上它們。要獲得非常好的效果,請使用2層或更多層的涂料。第一層可能看起來有點褪色,因為木頭會喝掉水分。嗯,這發生在我的情況下。
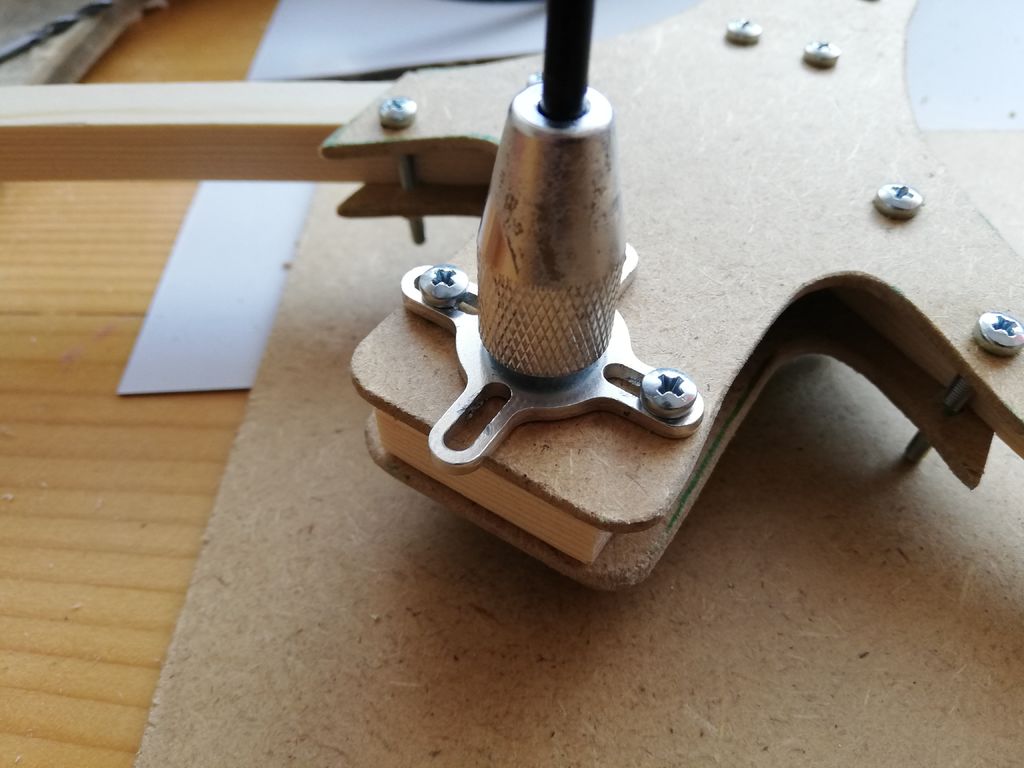
步驟8:安裝減振平臺




我有這個萬向節支架平臺,在我的版本中也兼作電池座。你必須用拉鏈和/或螺絲將它安裝在你的框架下面。電池的重量有助于吸收大量的振動,因此您將獲得非常好的攝像機鏡頭。你也可以在塑料桿上安裝一些起落架,我覺得這是不必要的。這種黑色效果很好,此時你應該有一個漂亮的框架,是時候設置你的飛行控制器了。
步驟9:設置ArduCopter



設置飛行控制器你需要一個額外的免費軟件。在Mac OS上下載Windows上的Mission Planner或APM Planner。當您插入飛行控制器并打開軟件時,向導幫助程序將在您的主板上安裝最新固件。它還可以幫助您校準指南針,加速度計,無線電控制器和飛行模式。
飛行模式
我建議使用穩定,海拔高度保持,懶人,圓圈,返回家園和土地作為你的六種飛行模式。 Circle 在工廠檢查方面非常有用。它將圍繞給定的坐標進行軌道運行,因此有助于以非常精確的方式從各個角度分析您的植物。我可以用棍子進行軌道運動,但很難保持完美的圓形。 Loiter 就像在天空中停放無人機一樣,因此您可以拍攝高分辨率的NDVI圖像,如果您松開信號或松開無人機的方向, RTH 非常有用。
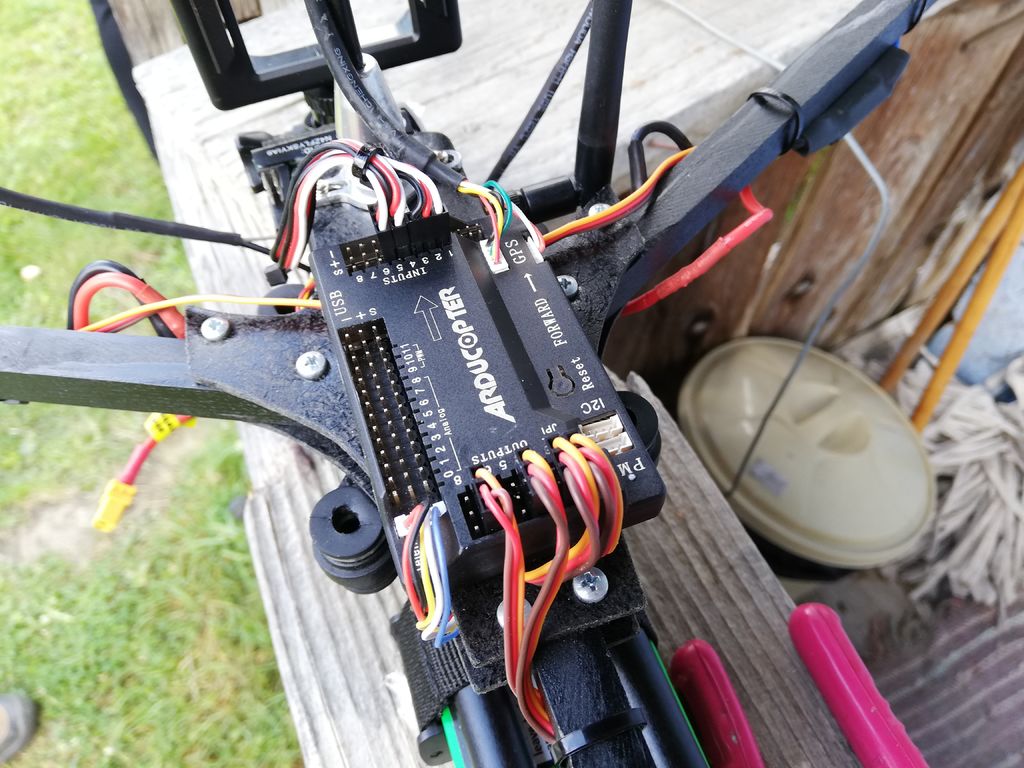
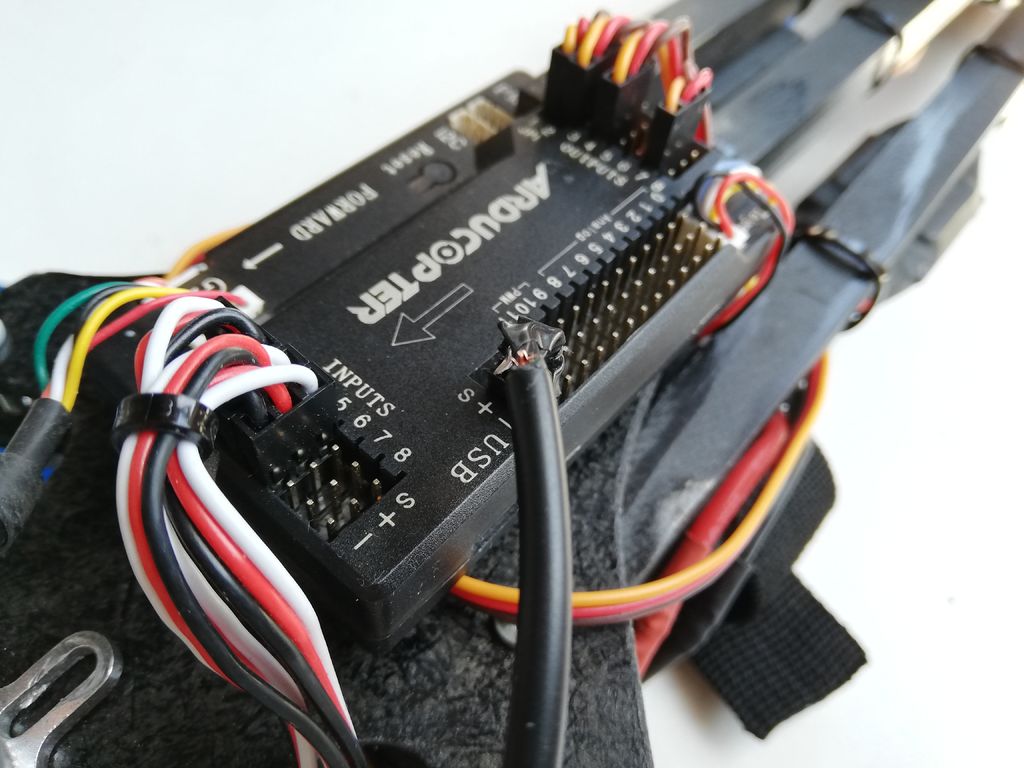
注意接線。使用原理圖將ESC插入正確的引腳,并在Mission Planner中檢查輸入通道的接線。永遠不要用道具測試這些!
步驟10:安裝GPS,攝像頭和飛行控制器


一旦你的飛行控制器校準后,您可以使用一些泡沫膠帶并將其安裝在框架的中間。確保它朝前并有足夠的空間容納電纜。使用3毫米螺絲安裝GPS并使用拉鏈將相機固定到位。這些GoPro克隆帶有所有安裝實用程序,因此安裝這個實用程序非常簡單。
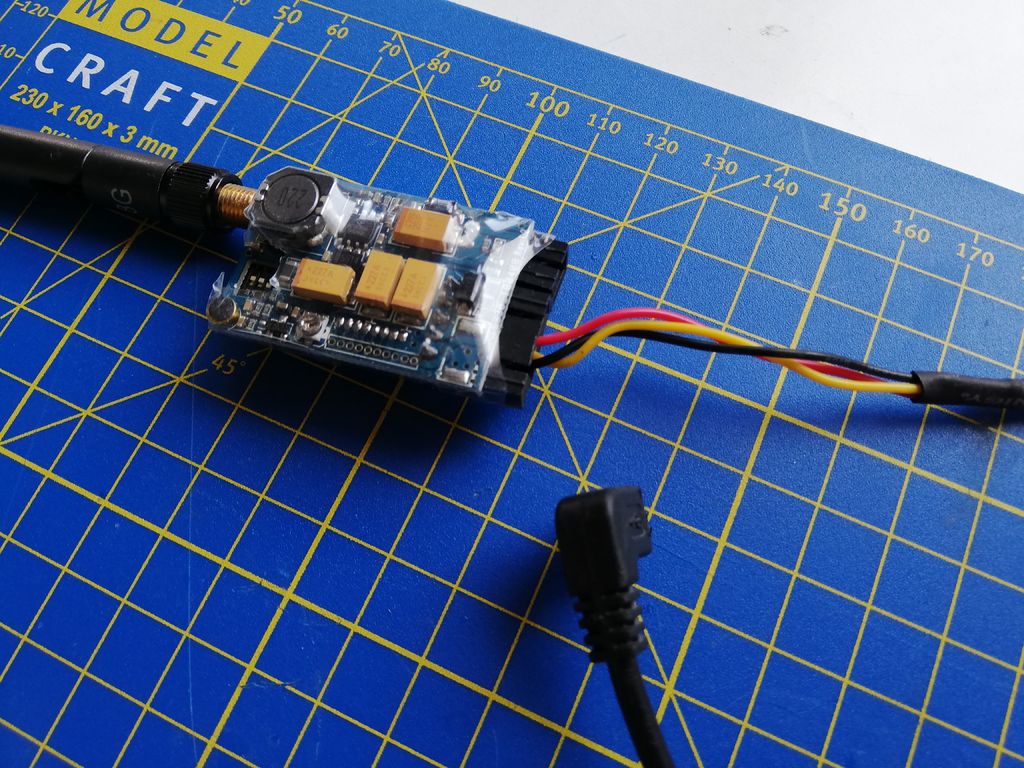
步驟11:電介質和電源電纜
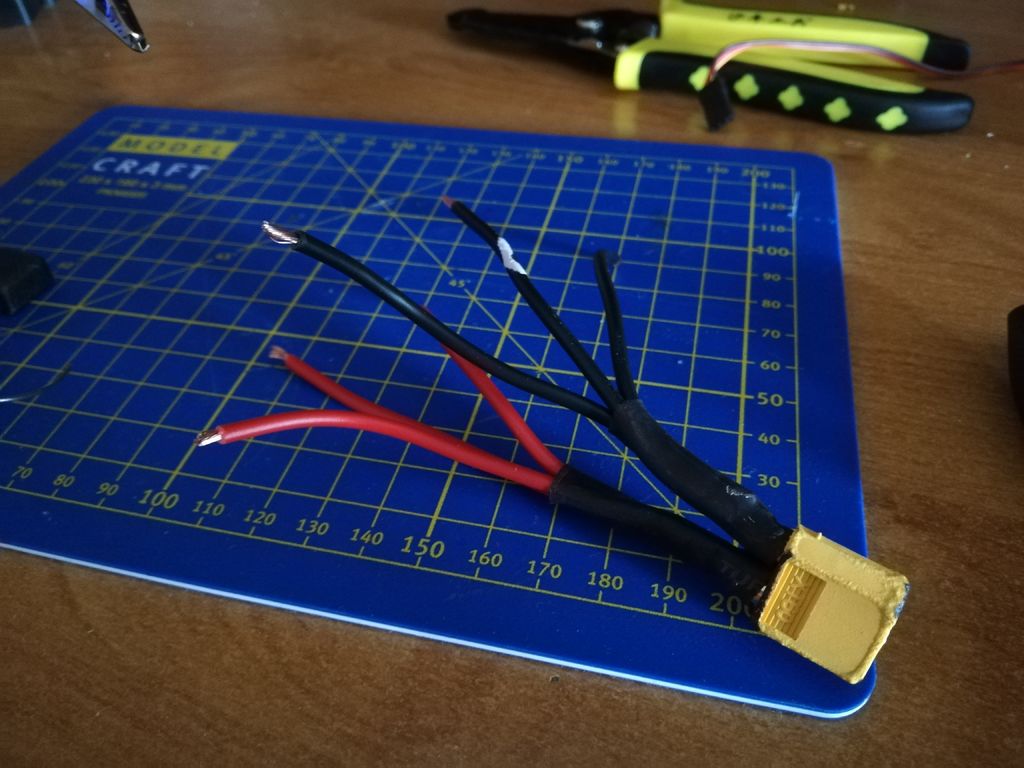
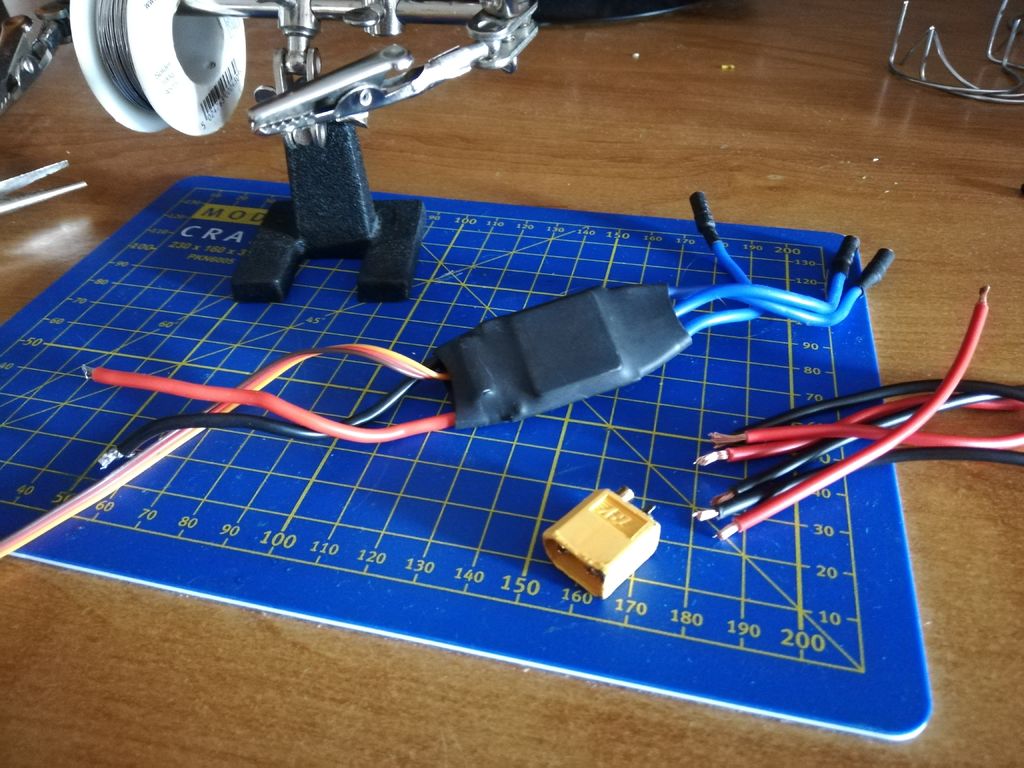
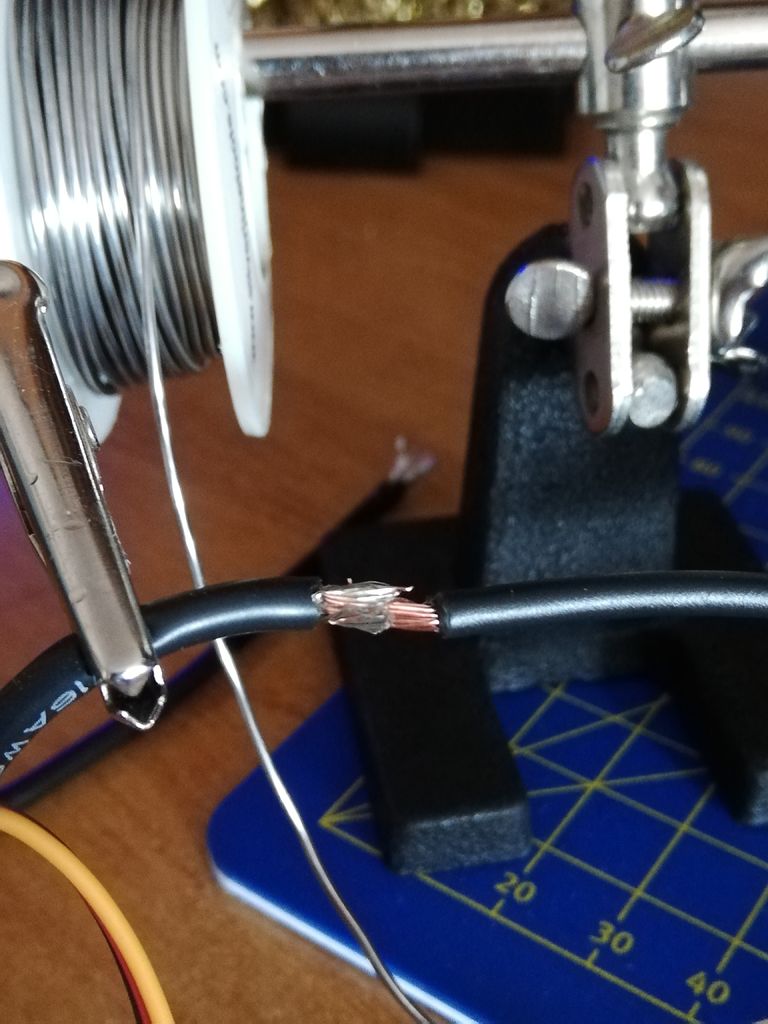

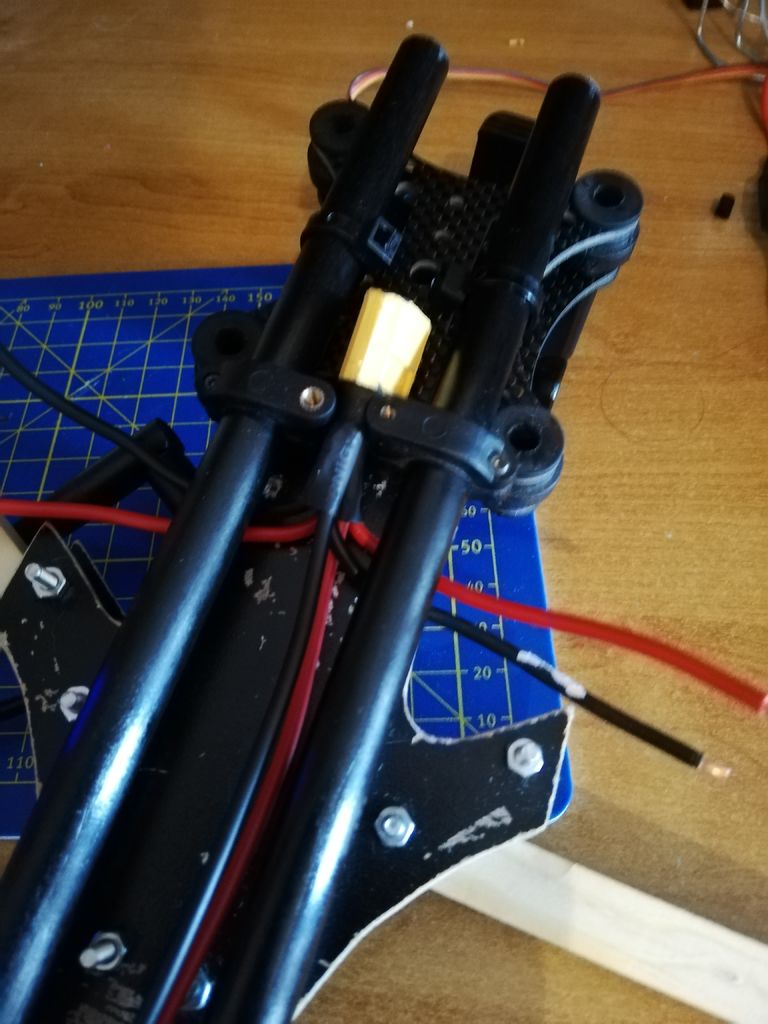

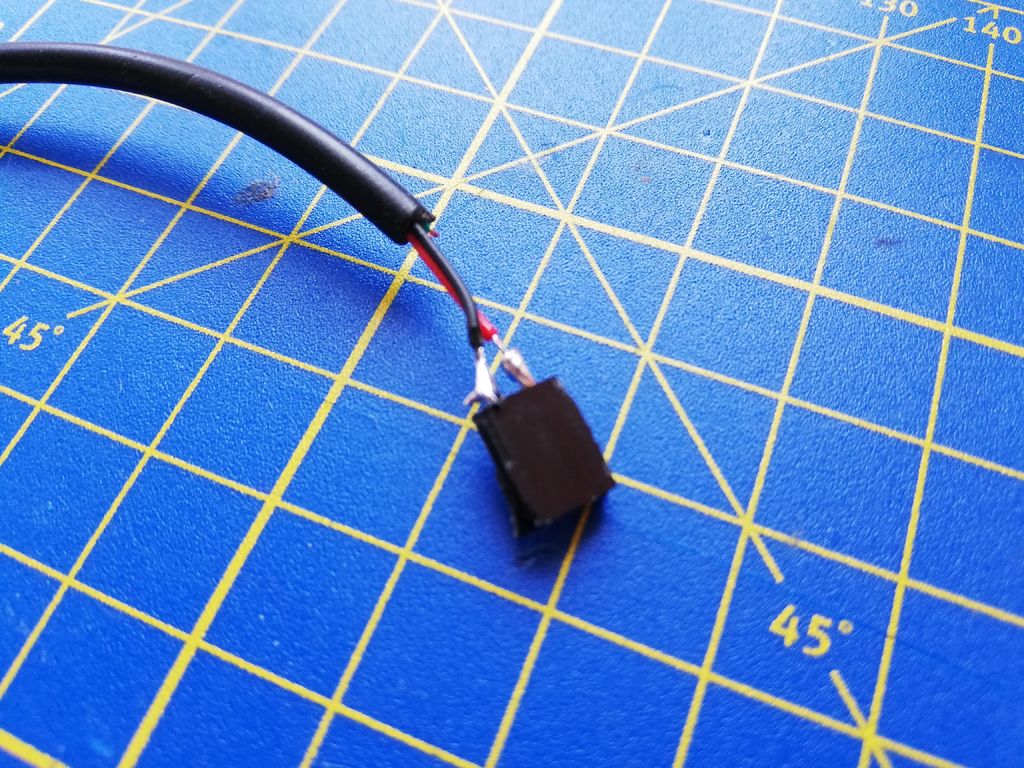
我的電池有一個XT60連接器,所以我將3根正極和3根負極焊接到一個母連接器的每個引腳上。使用一些熱縮管來保護連接不會使它們短路(您也可以使用電氣膠帶)。當你焊接這些粗線時,將它們擦在一起并用銅線固定,然后加入大量熔化的焊料。您不希望沒有冷焊點,尤其是在為ESC加電時。
步驟12:接收器和天線


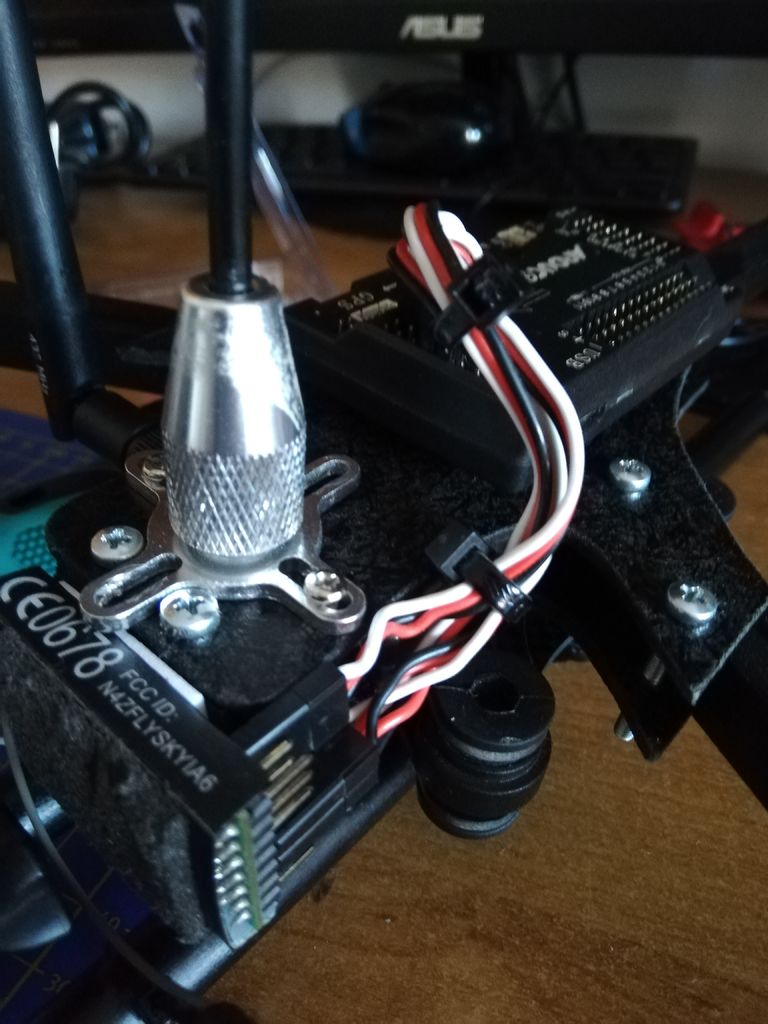

要獲得良好的信號接收,您必須將天線安裝在90度。我使用拉鏈和熱縮管將我的接收器天線安裝在我的無人機前面。大多數接收器都帶有電纜,并且通道標有標簽,因此應該很容易設置它。
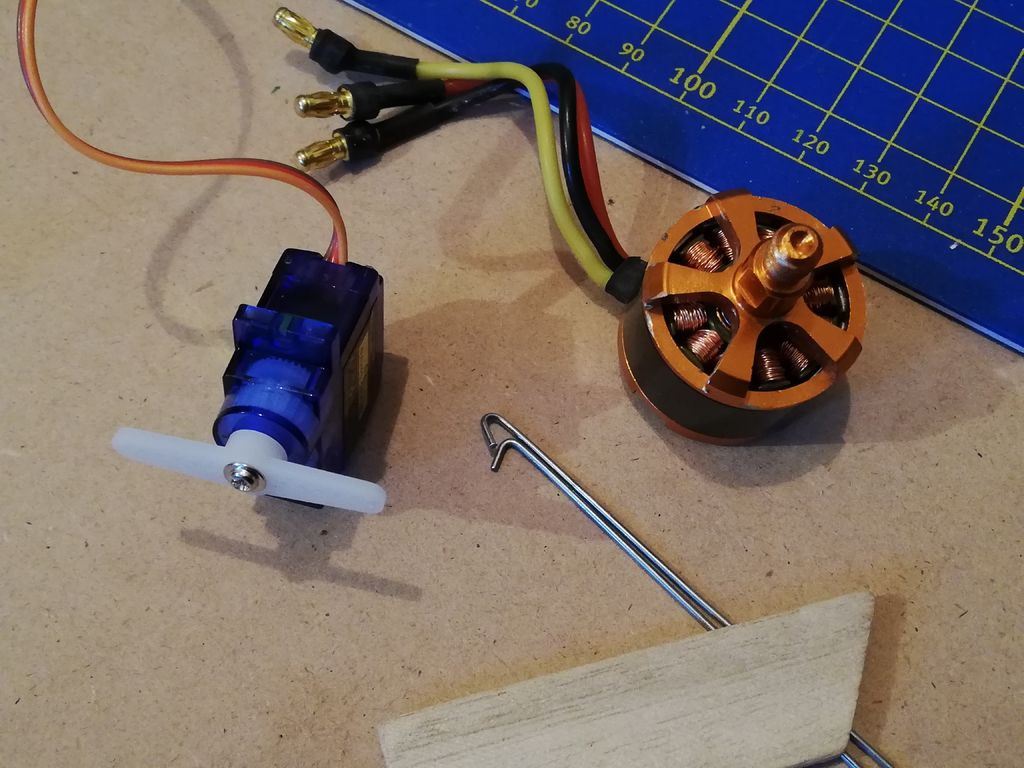
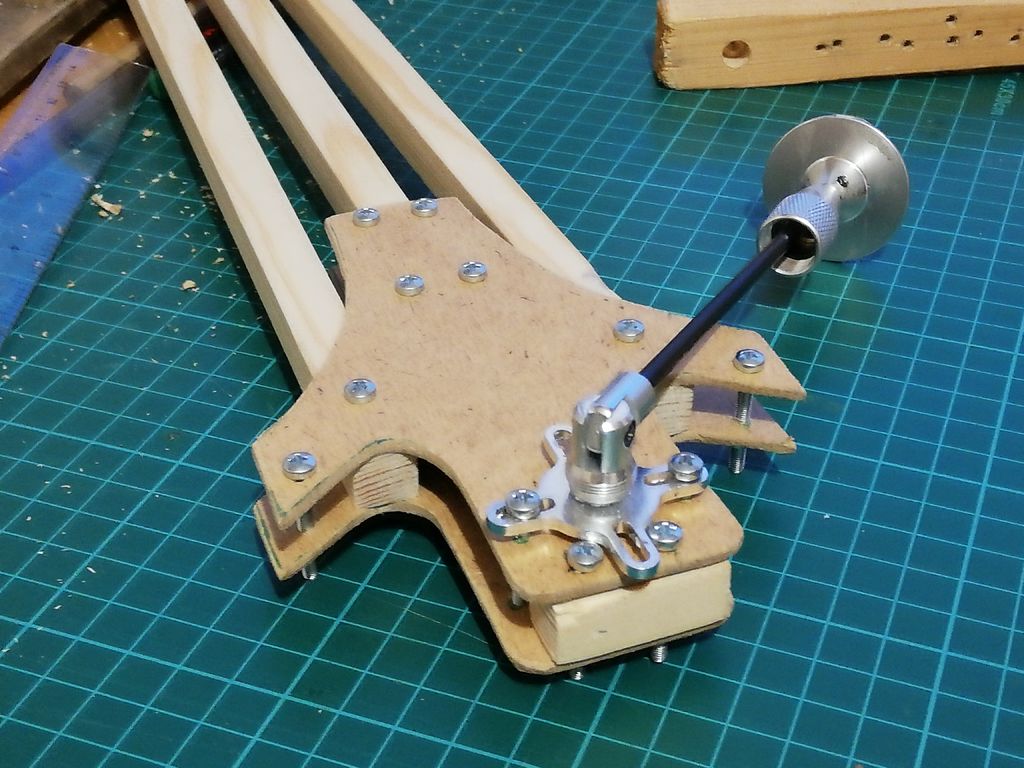
步驟13:尾部機制
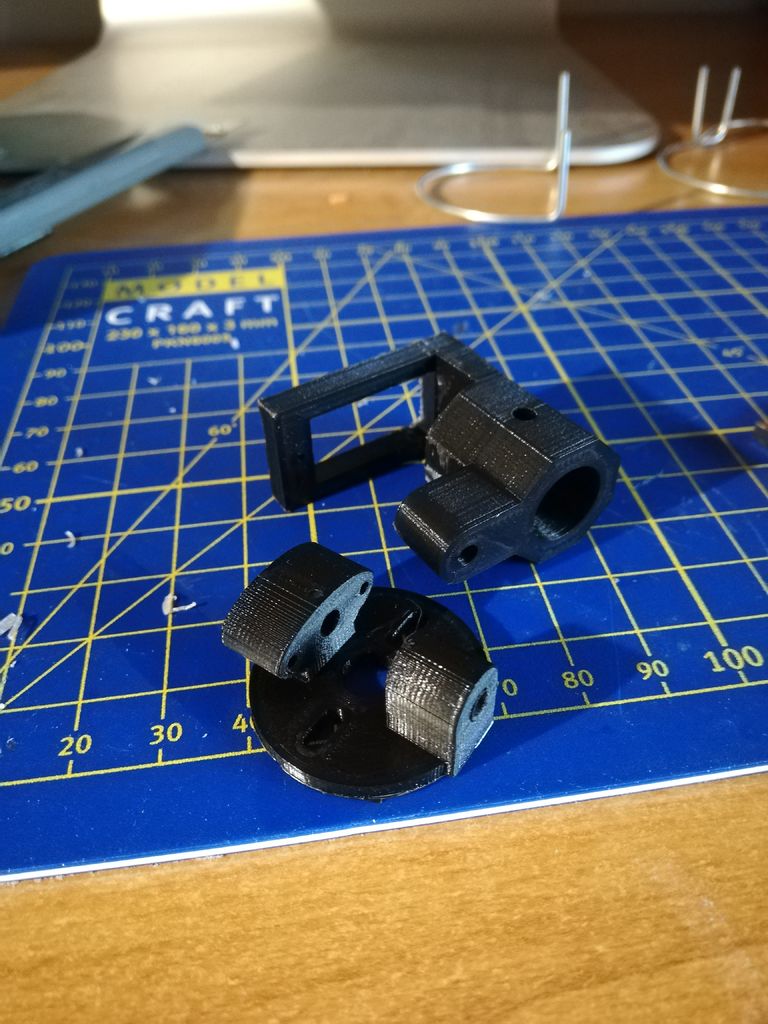
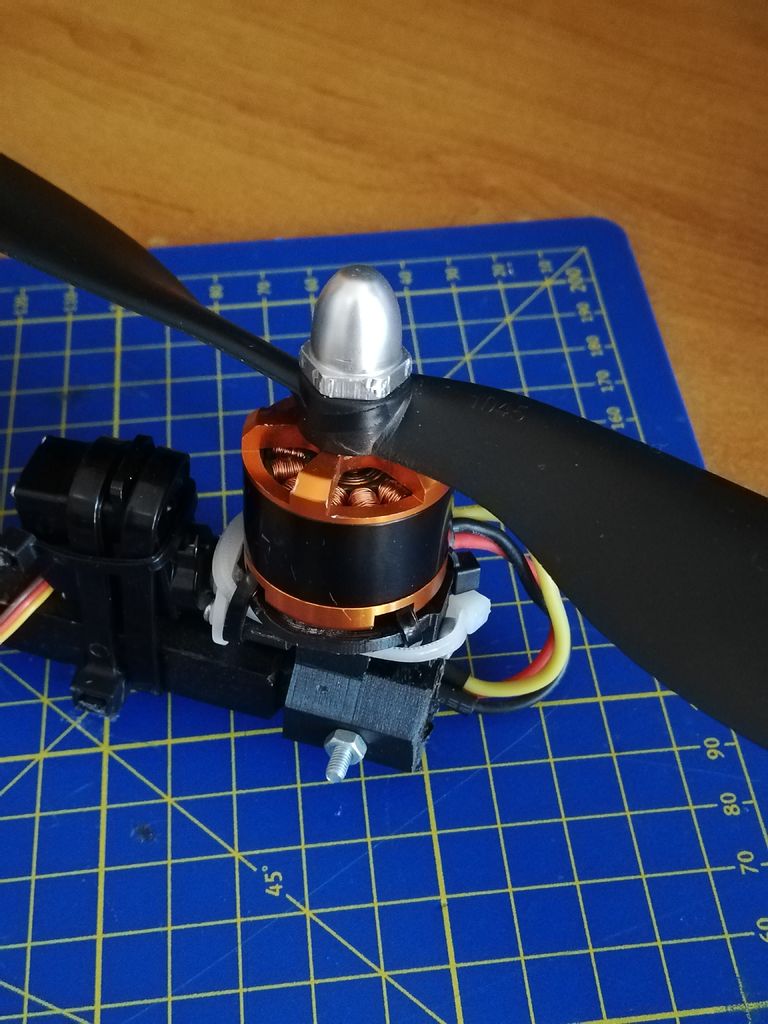
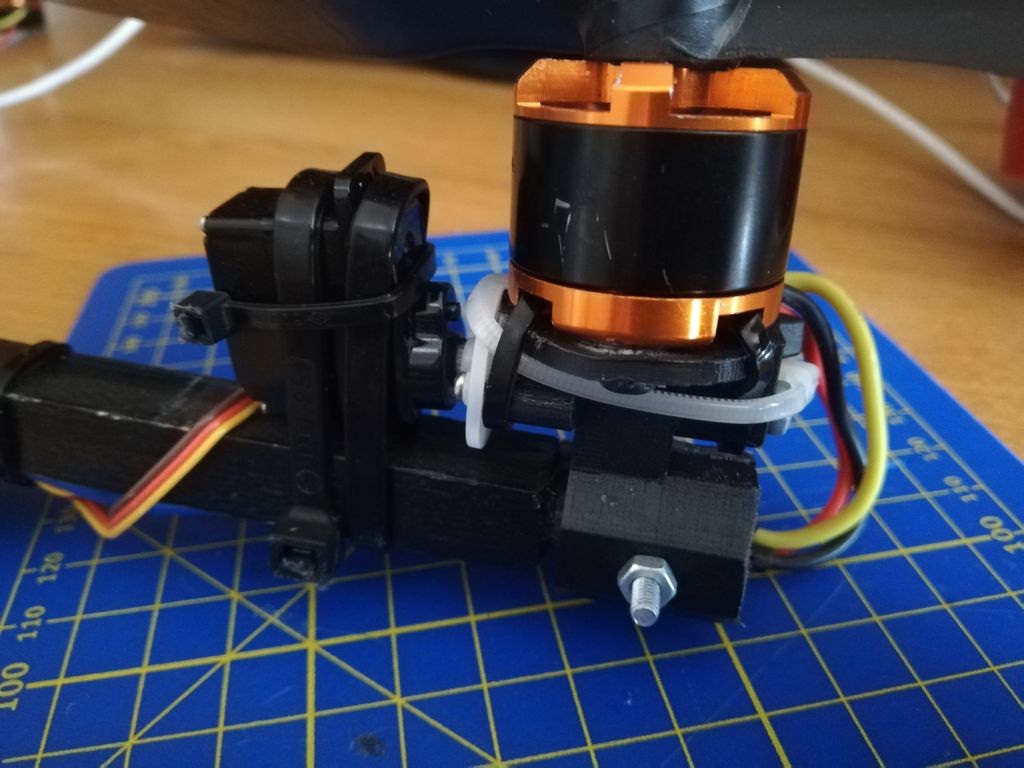
尾部機制是三旋翼的靈魂。我在網上找到了這個設計,所以我試了一下。我覺得原來的設計有點弱,但是如果你扭轉了機制,那就完美了。我用dremel工具切割多余的部分。在圖片上看起來我的伺服電機可能會受到一點點影響,但它完美無瑕。擰緊螺絲時請使用一滴強力膠水,以免因振動而脫落;或者你可以像我一樣拉鏈馬達。
步驟14:進行懸停測試和PID調整
仔細檢查所有連接,確保在插入電池時不會油炸任何東西。安裝螺旋槳并嘗試用無人機盤旋。我的開箱即用非常順暢,我只需要進行一些偏航調整,因為它的調整方式太多了。我無法在這個Instructable中教授PID調音,我從Joshua Bardwell的視頻教程中學到了幾乎所有東西。他比我更好地解釋了這一點。
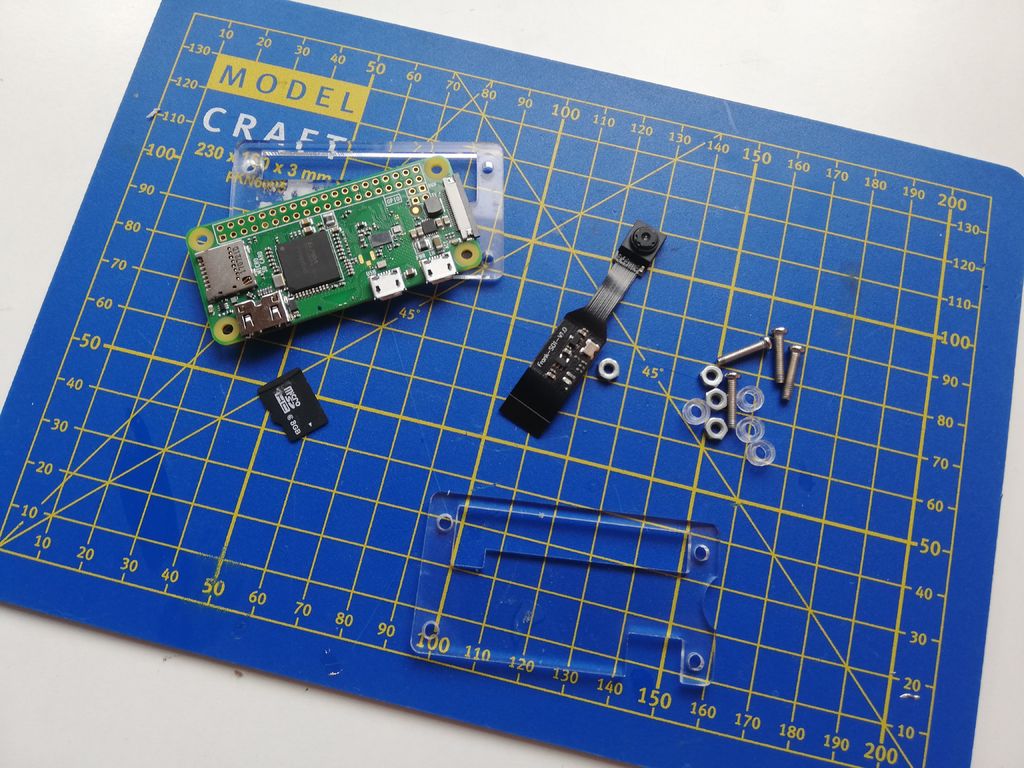
步驟15:選擇一個Raspberry并安裝Raspbian(Jessie)



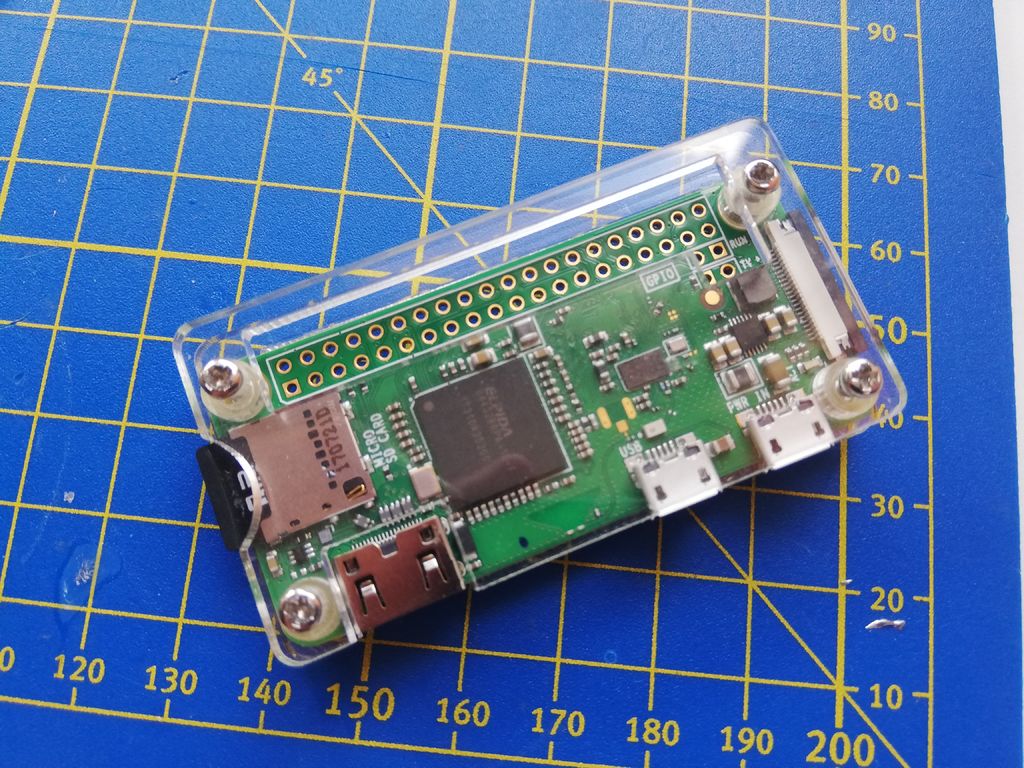

我想盡量保持這個重量輕,所以我選擇了RPi Zero W.我使用的是Raspbian Jessie因為版本較新我們用OpenCV來解決原始素材的植被指數問題。如果你想要更高的FPS率,你應該選擇Raspberry Pi v4。你可以在這里下載軟件。
安裝依賴項
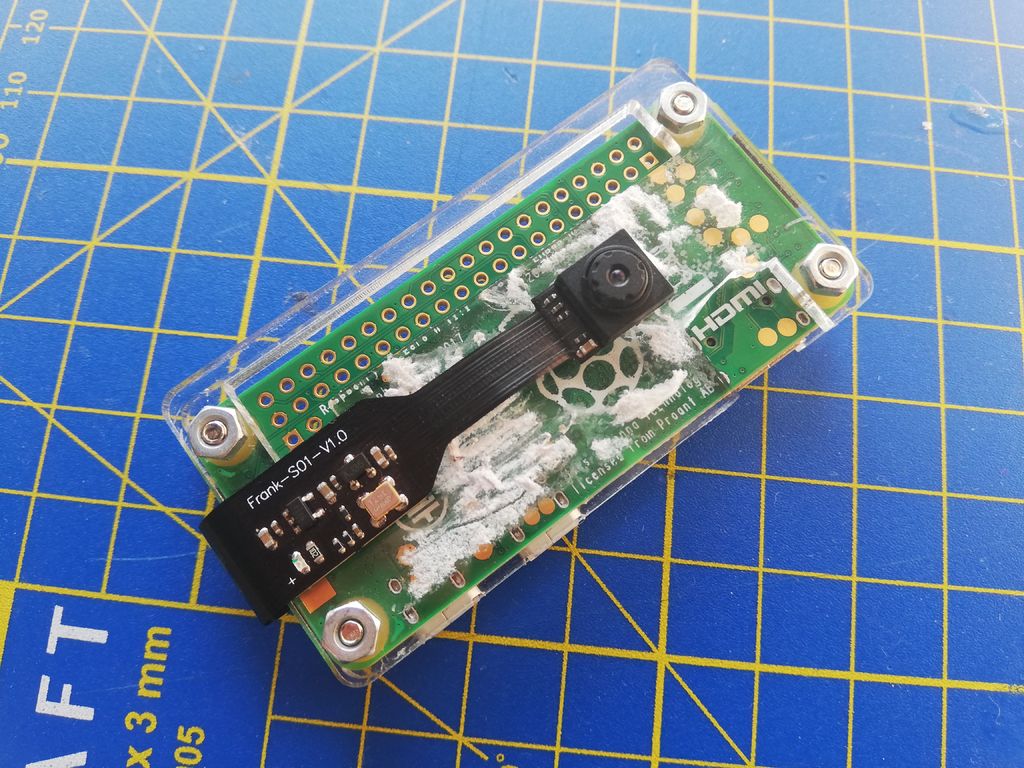
我們將在此項目中使用PiCamera,OpenCV和Numpy。作為圖像傳感器,我選擇了較小的500萬像素攝像頭,它只與零板兼容。
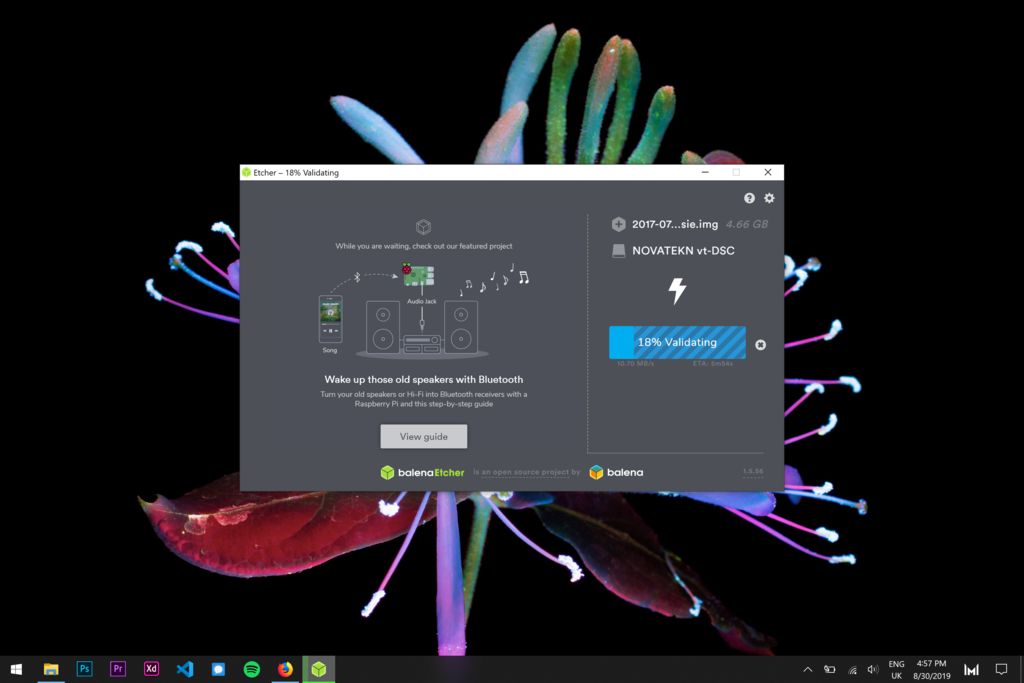
使用您喜歡的工具(我喜歡Balena Etcher)來閃現您的圖像。
使用已連接的顯示器啟動Raspberry。
啟用相機和 SSH 界面。
使用終端中的 ifconfig 檢查您的IP地址。
使用 ssh pi @ YOUR_IP 命令將SSH連接到您的RPi。
復制并粘貼說明以安裝所需的軟件:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libtiff5-dev libjasper-dev libpng12-dev
sudo apt-get install libjpeg-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install libatlas-base-dev gfortran
sudo pip install numpy python-opencv
python (to test it)
import cv2
cv2.__version__
您應該看到一個響應,其中包含OpenCV庫的版本號。
步驟16:測試NoIR相機和NDVI成像
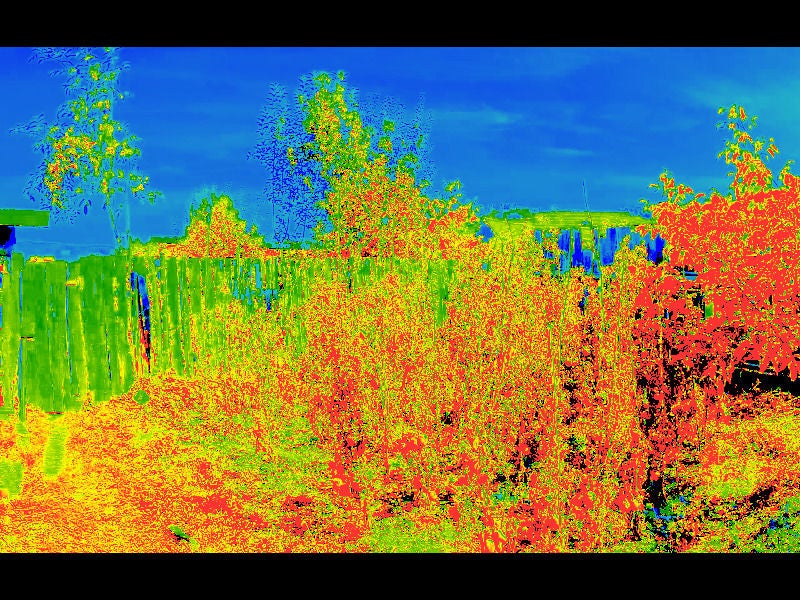

關閉RPi板,插入相機,然后我們可以嘗試用它進行一些NDVI成像。你可以看到花朵(紅色背景的那個),里面更綠的部分顯示出一些光合作用。這是我的第一次測試,用 Infragram 制作。我在他們的網站上學習了所有的公式和顏色映射,以編寫一個功能齊全的代碼。為了使事情更加自動化,我制作了一個Python腳本來捕獲幀,計算NDVI圖像并將它們以1080p的形式保存在直升機上。
這些圖像將會有一個奇怪的色彩圖,它們看起來就像來自另一個星球。進行一些測試,更改一些變量,在第一次任務之前微調傳感器。
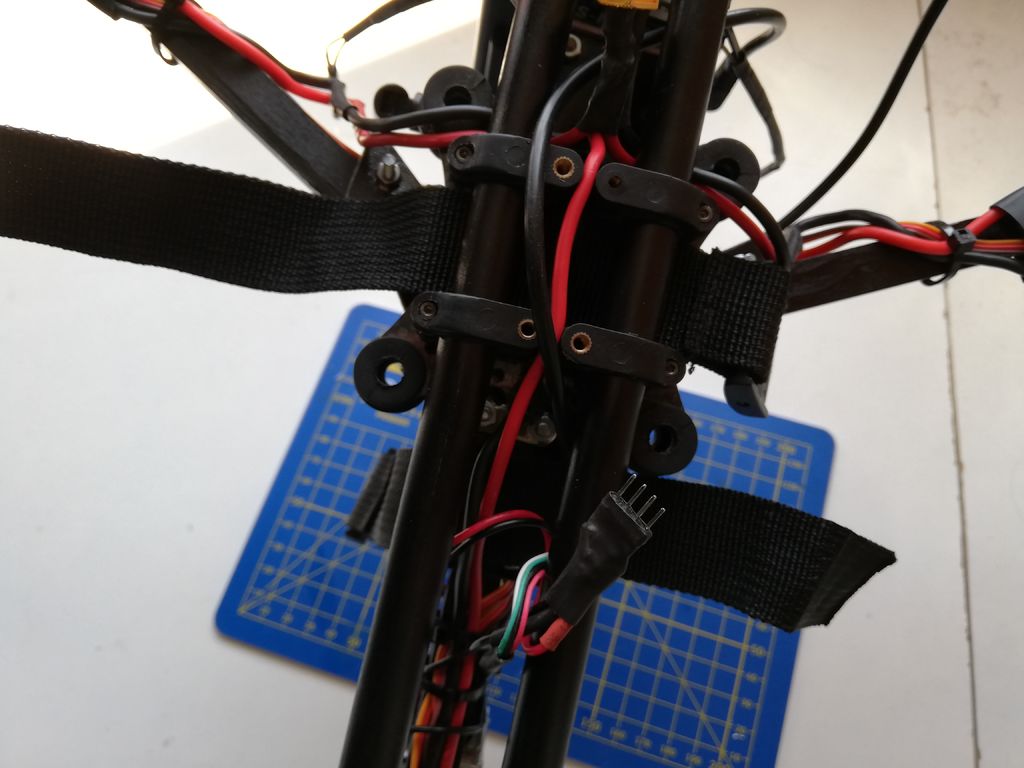
步驟17:在無人機上安裝RPi Zero W

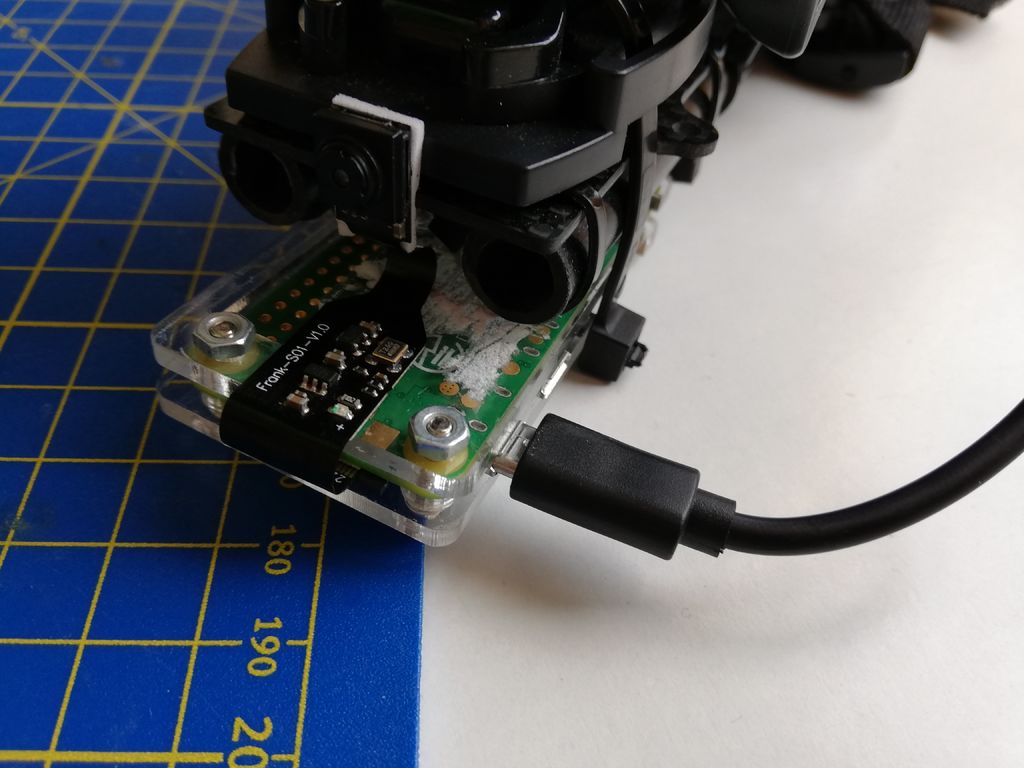
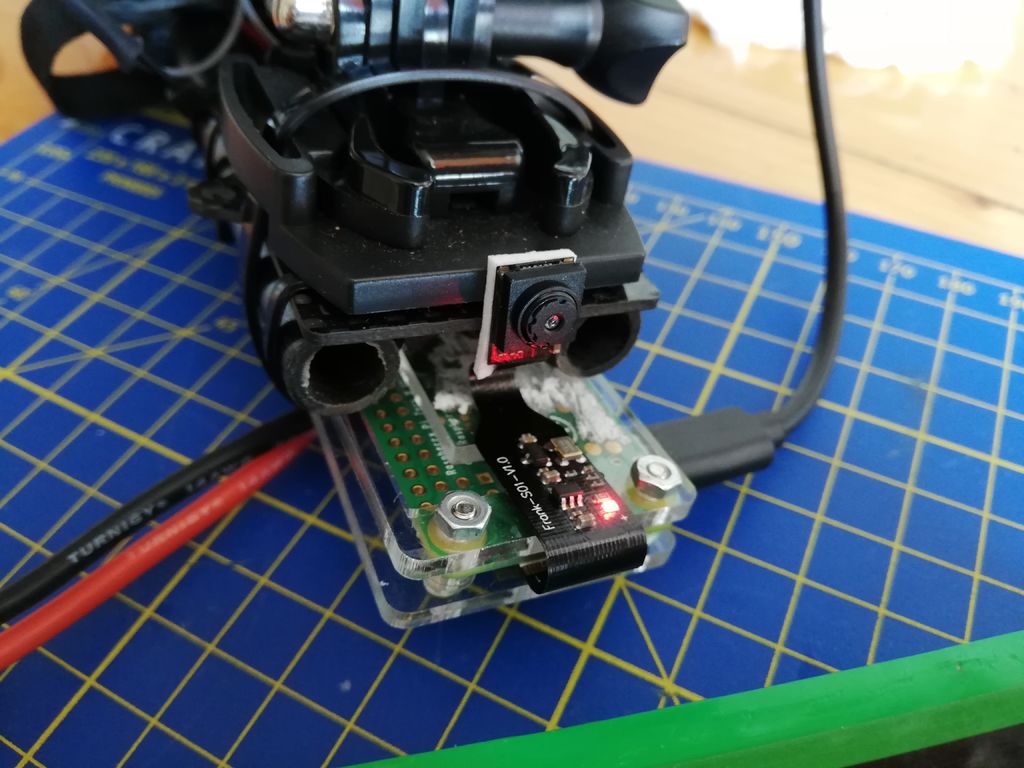
我安裝了Pi Zero在三輪車的前面。你可以像我一樣向前或向下對著你的相機。我面向前的原因是顯示植物和其他非光合作用物體之間的差異。 注意:有些表面可能會反射紅外線,或者它們比周圍環境溫暖,導致它們呈現明亮的黃色。
步驟18:添加視頻發送器(可選)
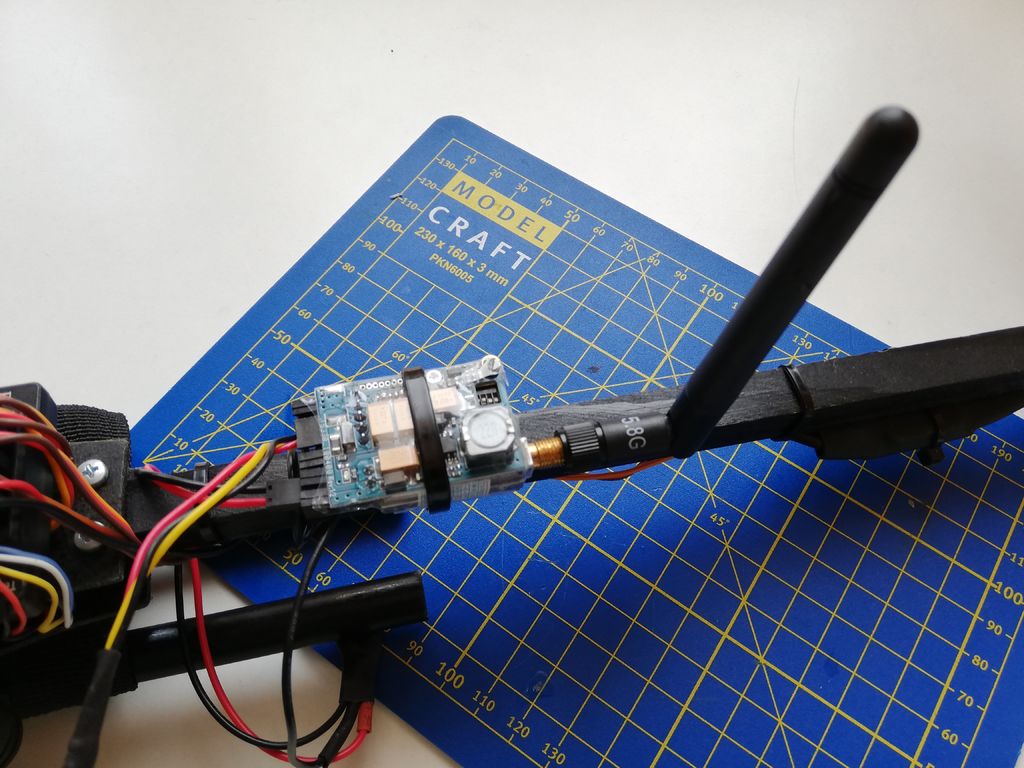


我把這個VTx放在一邊,所以安裝在直升機的后臂上。這有2000米的范圍,但我在測試時沒有使用它。只有FPV飛行才能獲得樂趣。當我不使用它時,電纜被移除,否則它們被隱藏在框架下面以保持我的構造良好和清潔。
步驟19:進行植物分析


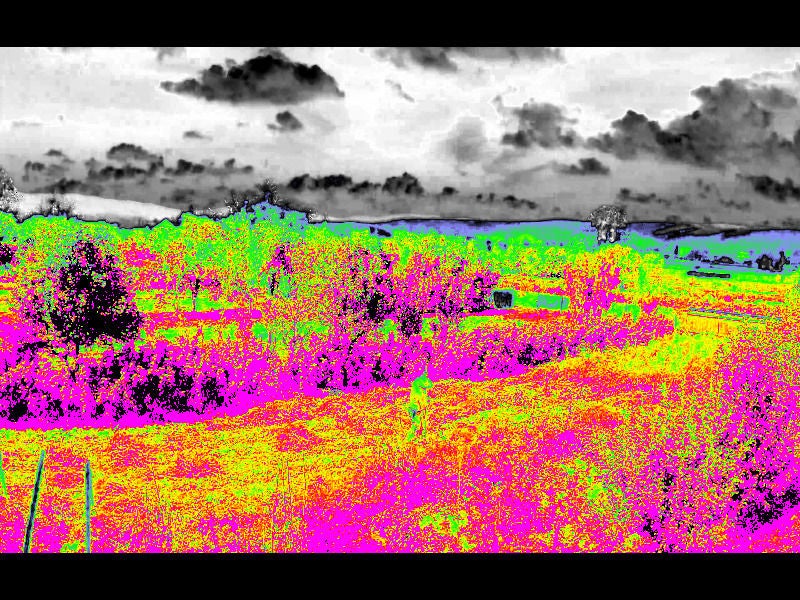

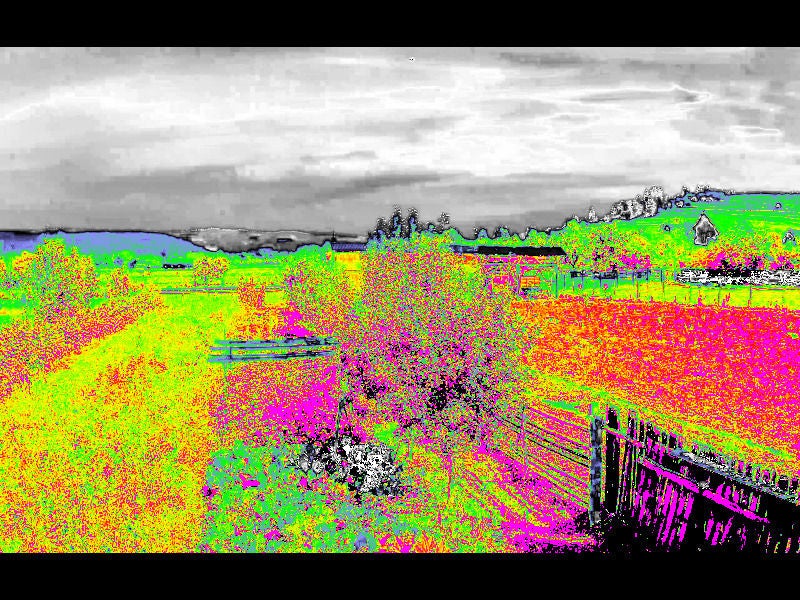

我做了兩次25分鐘的飛行以進行適當的分析。我們的大多數蔬菜似乎都沒問題,土豆需要一些額外的照顧和澆水。幾天后去檢查它有所幫助。與橙色和粉紅色的樹木相比,它們在圖片上看起來很綠。
我喜歡做圓圈飛行,這樣我就可以從各個角度檢查植物。你可以清楚地看到,在果樹下,一些蔬菜沒有得到足夠的陽光,這使得它們在NDVI圖像中變成藍色或黑色。如果樹的一部分在一天中的某個時間沒有獲得足夠的陽光,那不是問題,但如果整個植物變成黑白,那就不好了。
第20步:安全飛行;)


-
相機
+關注
關注
4文章
1435瀏覽量
54490 -
無人機
+關注
關注
230文章
10742瀏覽量
185610
發布評論請先 登錄
《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
DIY了一臺無人機,用全志T113芯片
無人機滑環的核心特點及其應用分析






 工商網監
工商網監
評論