 跟蹤相機的制作
跟蹤相機的制作
第1步:收集材料
Raspberry Pi Model B 2(或
L298N H橋電機驅動器
帶齒輪箱的電機
USB網絡攝像頭
跳線
帶螺母的機械螺絲
齒輪
環氧/熱膠
可選:激光
第2步:力學

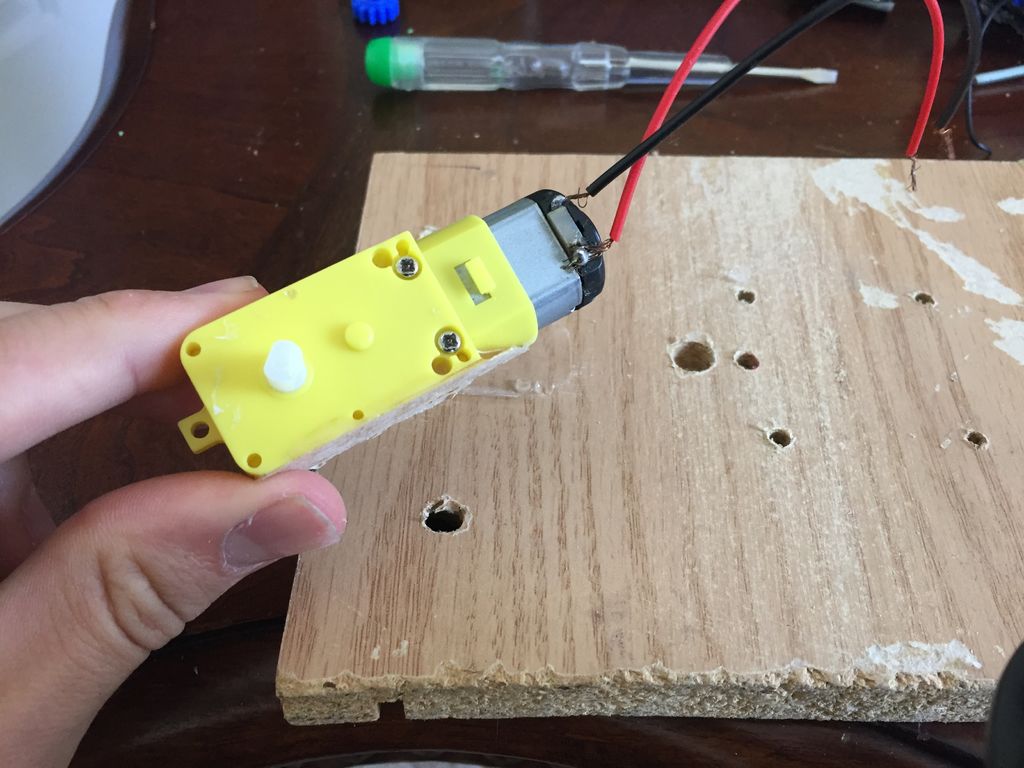
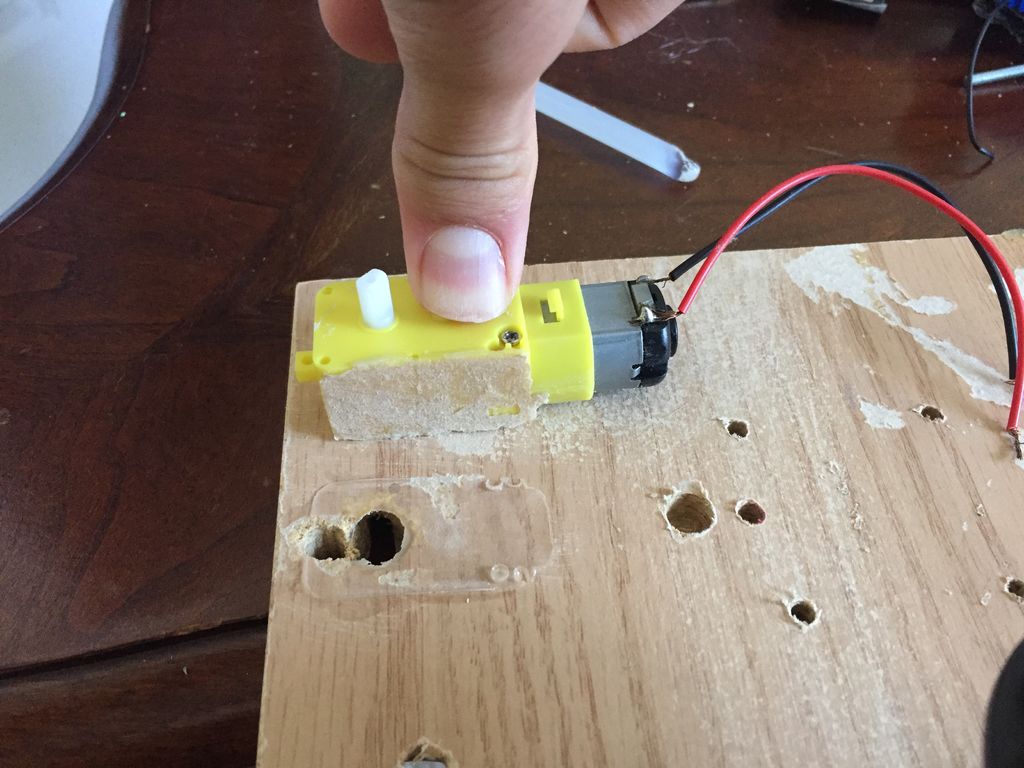
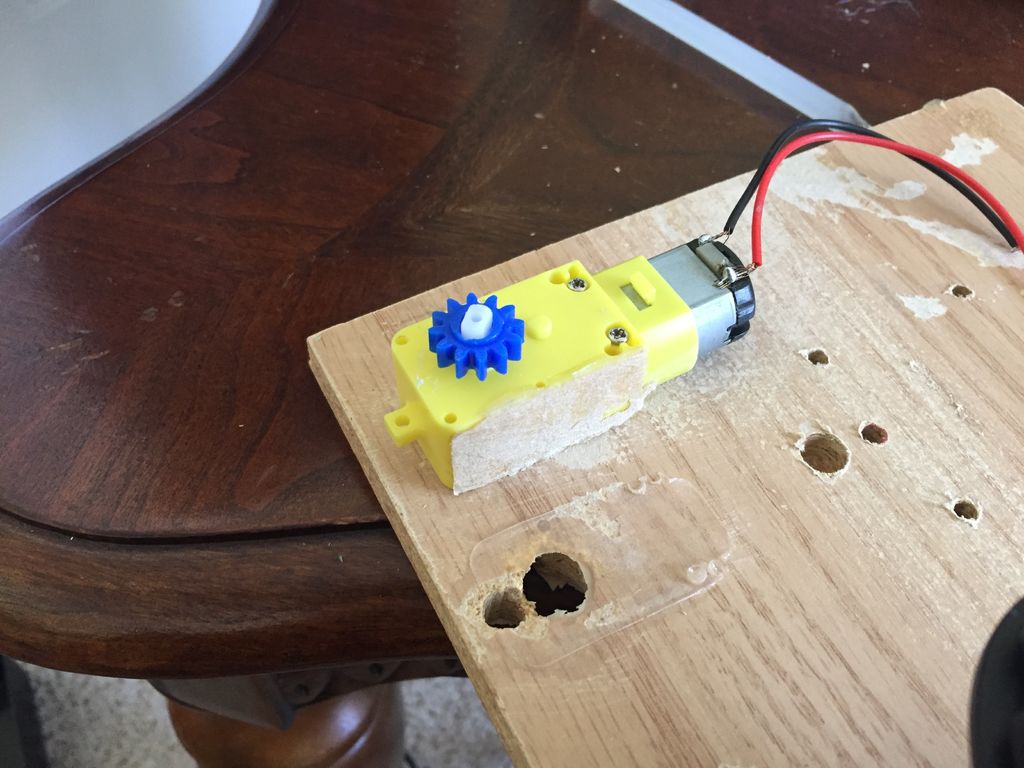

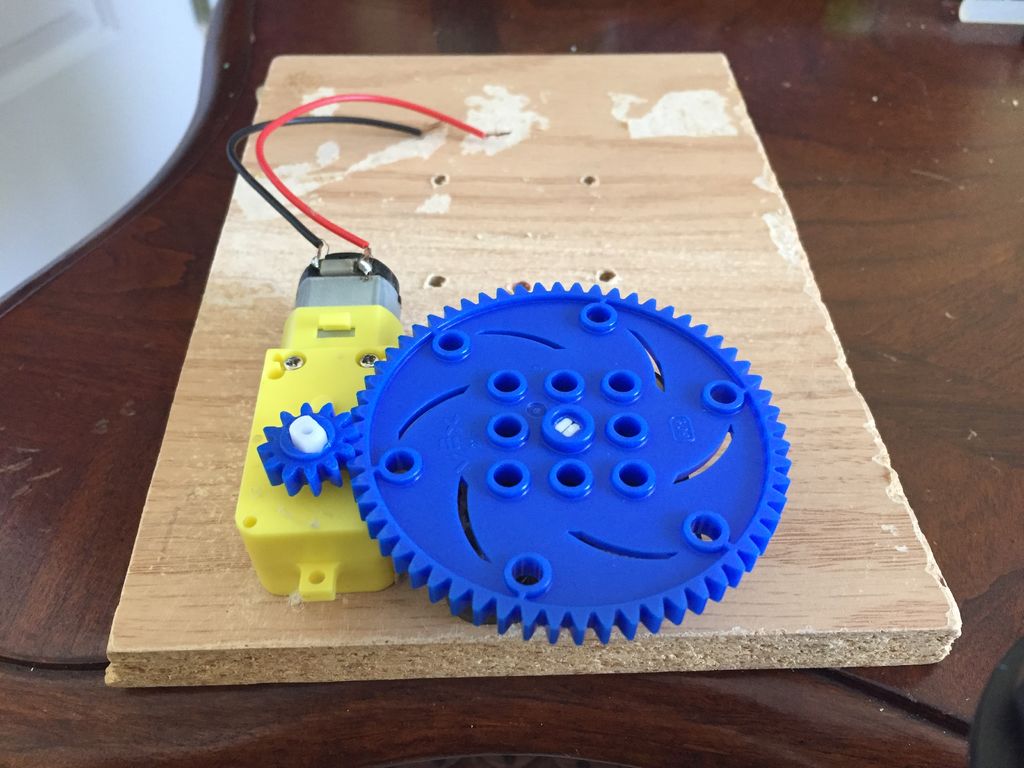

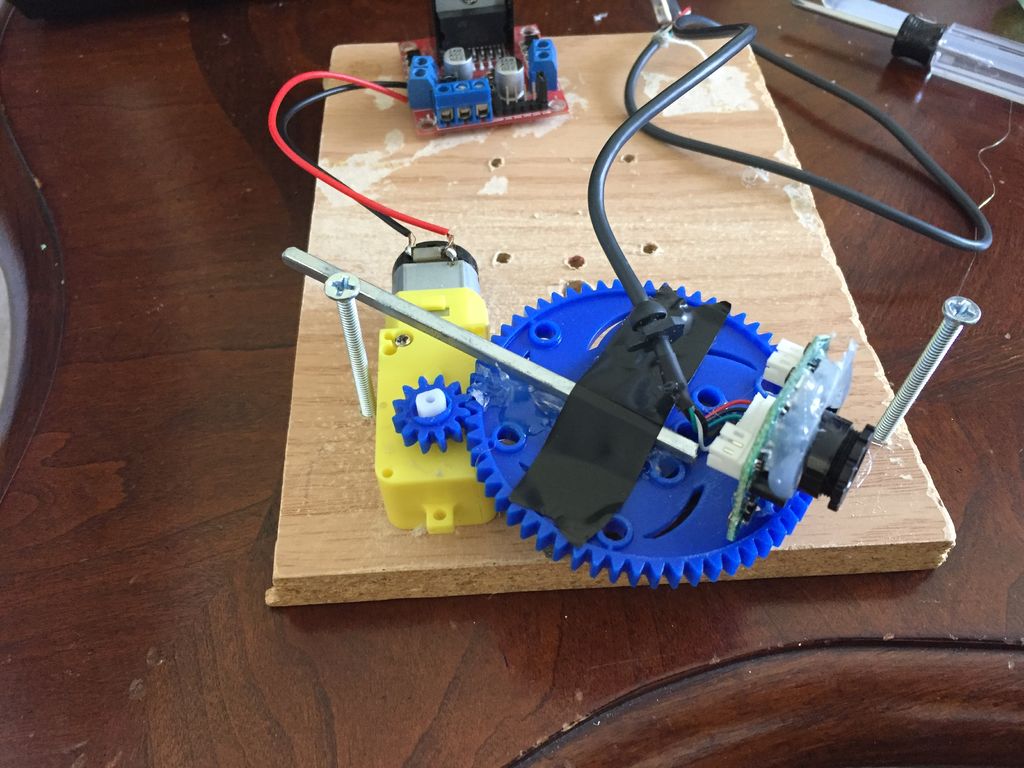
使用廢木片(我的那塊)有很好的打擊,這是好的),將電機安裝在不在中間的位置。然后,在電機上安裝一個小齒輪。齒輪上的孔可能需要放大以適應電機的配件。
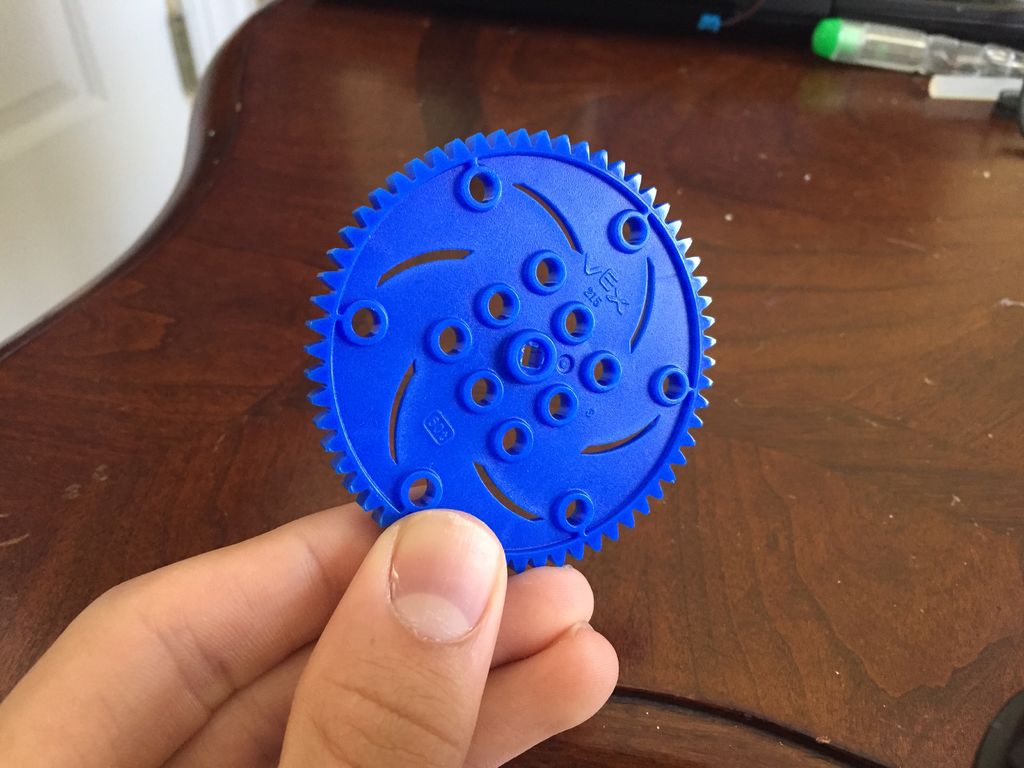
下一步是安裝大齒輪(松動),使其齒與小齒輪齒嚙合。在用砂紙粗化木材之后,使用熱膠將其安裝到板上以獲得更好的粘合。
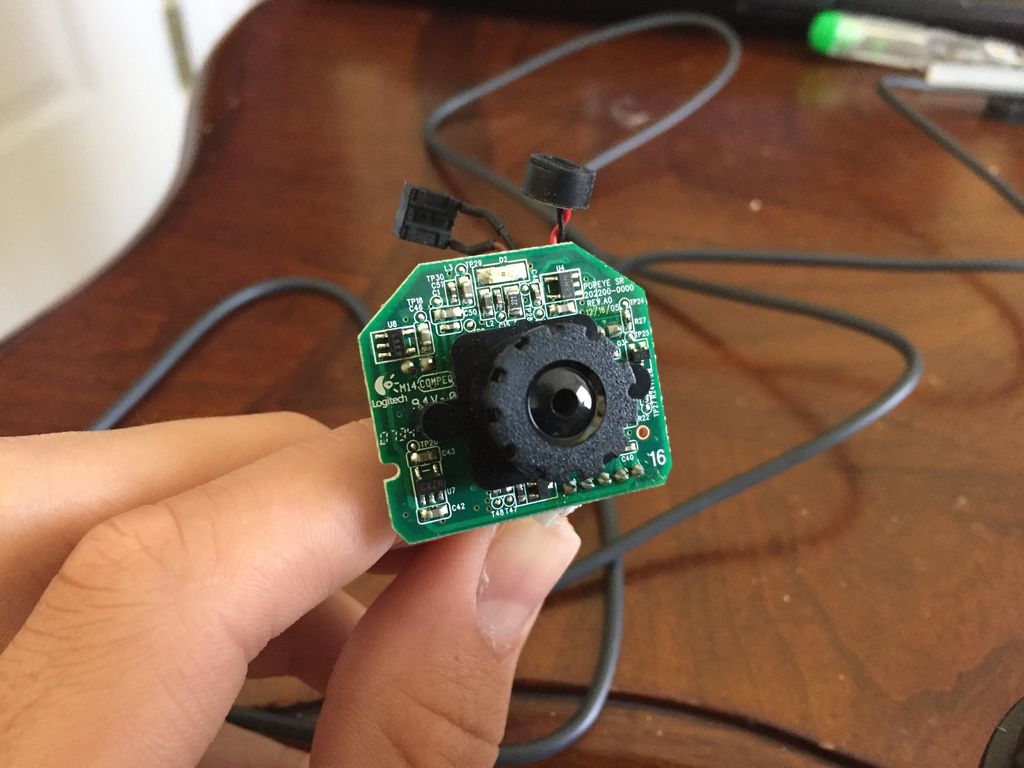
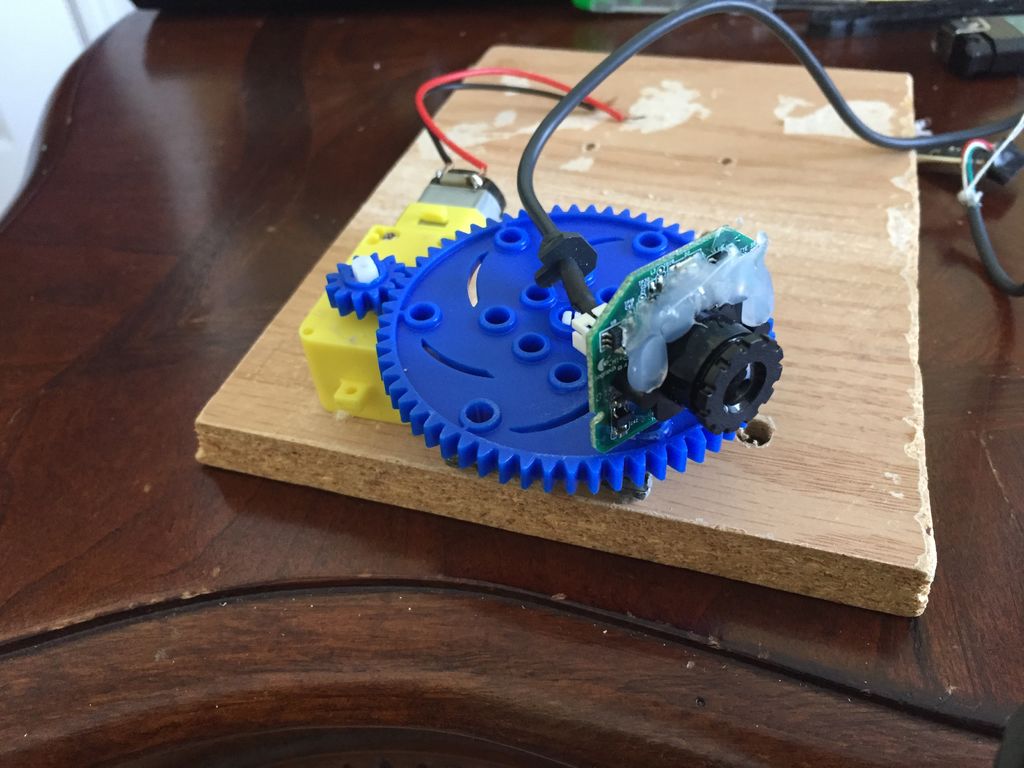
齒輪到位后,是時候將網絡攝像頭安裝到大齒輪上了。在這里,我已將網絡攝像頭從其外殼中取出,并僅使用網絡攝像頭的核心電路板,以便于安裝。網絡攝像頭使用環氧樹脂粘合劑粘合在一起。
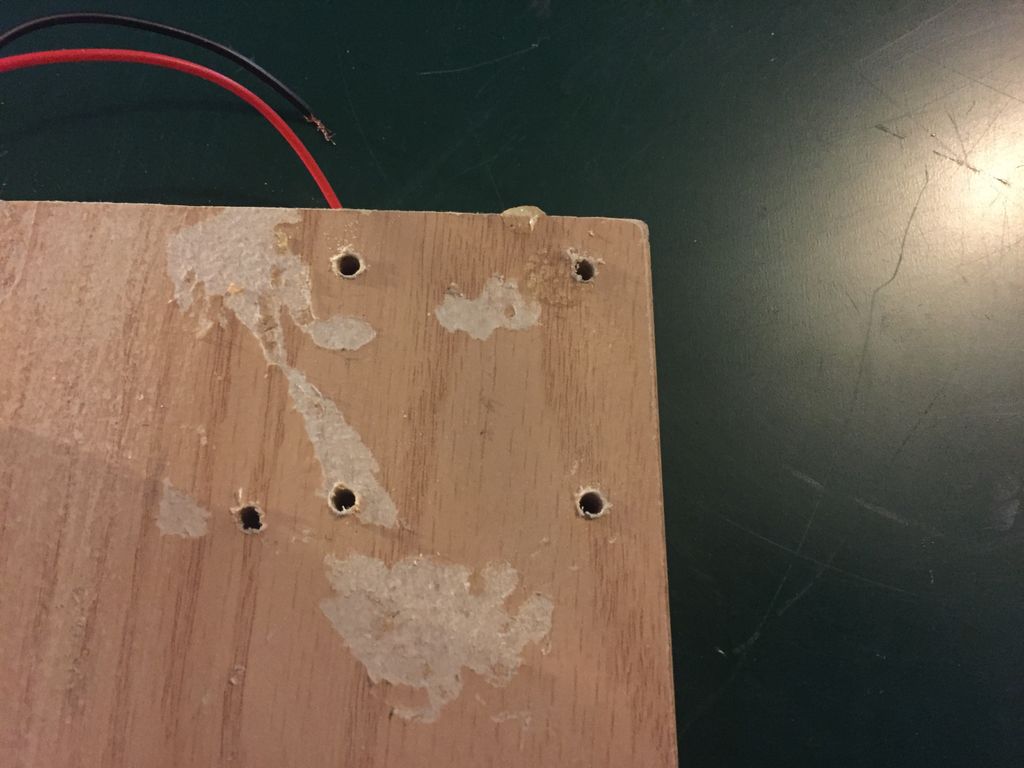
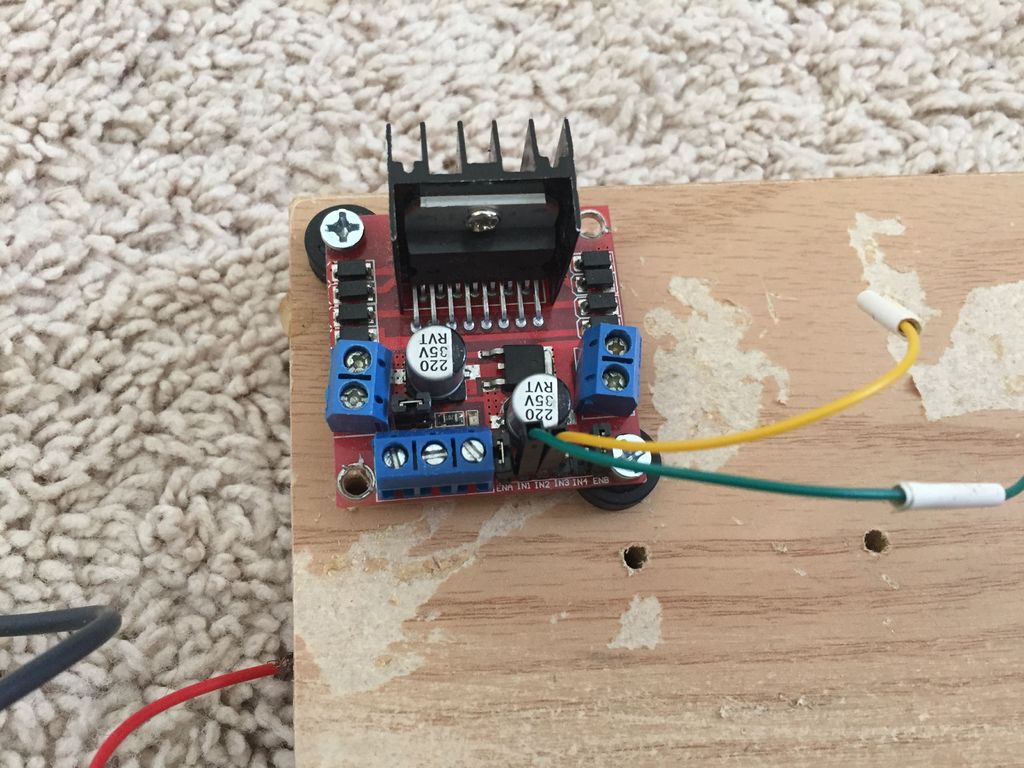
要安裝的最后一個組件是可選的 - 用于L298N H橋。這可以通過簡單地在電路板上鉆四個孔并使用機械螺釘和六角螺母安裝電路板來安裝。
步驟3:接線
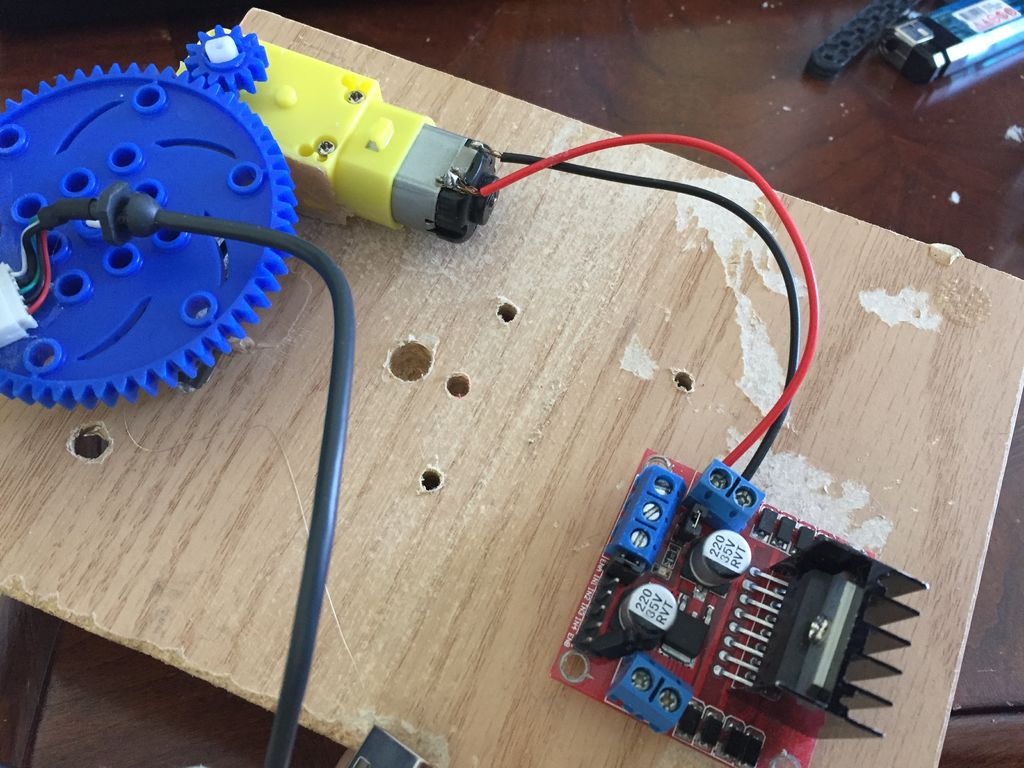
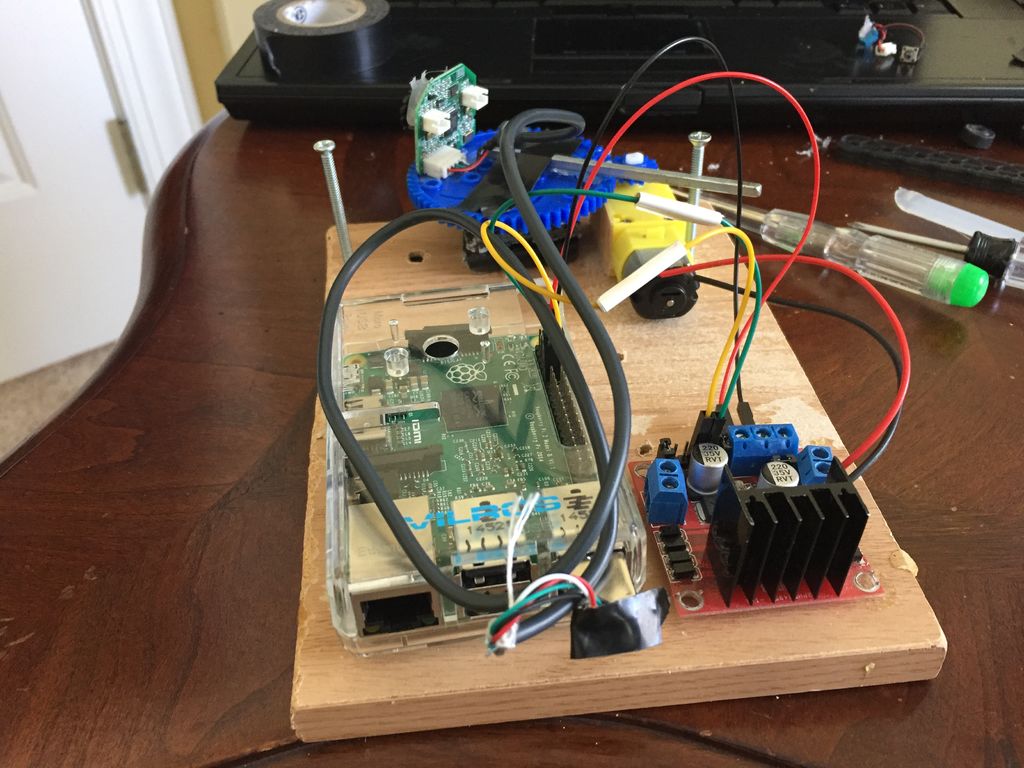
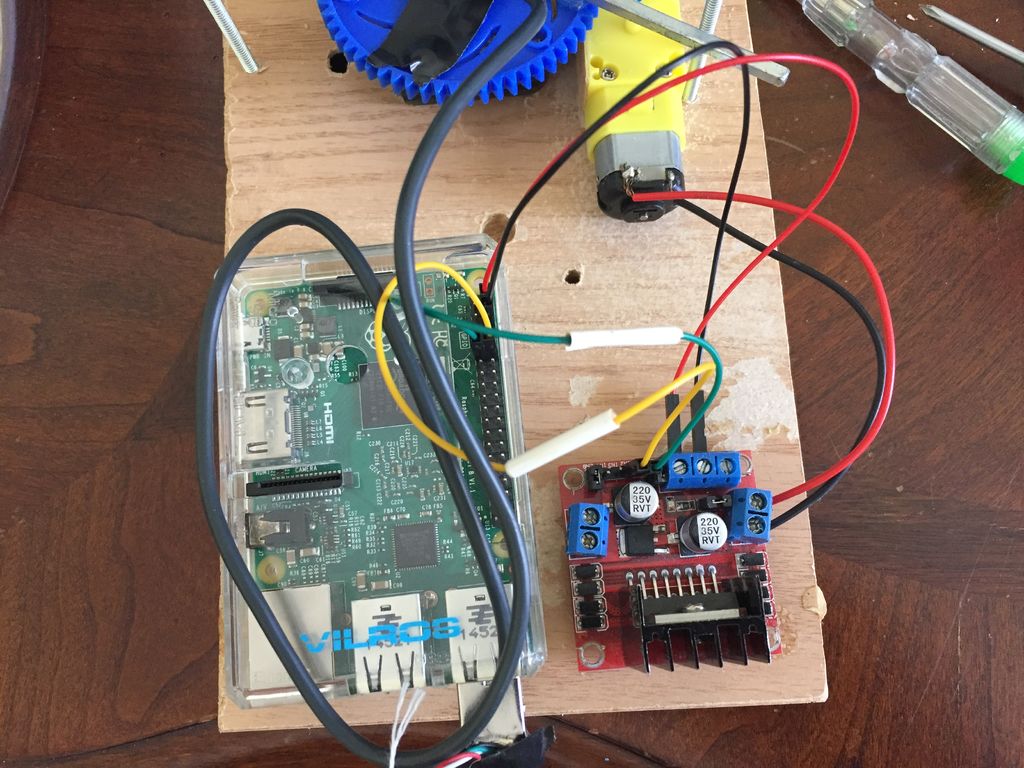
現在將所有內容掛鉤。電機的兩根電線將直接連接到電路板左側或右側的兩個端子連接器之一的L298N H橋(我選擇了左側)。需要使用兩根導線將L298N的5V和地連接到Raspberry Pi的5V和接地電源。然后,需要兩根母 - 母跨接線從L298N連接到Pi的引腳17和18.網絡攝像頭只需連接到其中一個Pi的USB端口。這就是所有的布線!
第4步:代碼
現在是這個項目最具挑戰性的方面。
我使用Python的OpenCV庫實時跟蹤球。該程序還利用Pi附帶的gpiozero庫根據OpenCV確定的球的x坐標轉動電機。該代碼能夠根據其黃色確定球的位置,該黃色應該是背景中唯一的,以便有效。向程序提供較低和較高的顏色范圍,以確定球的位置。然后,OpenCV使用以下參數調用.inRange()函數:當前幀(來自網絡攝像頭)以及下部和上部顏色邊界。確定框架上球的坐標后,如果球不在中心(640像素寬框架中x坐標范圍為240-400),程序將告訴電機轉動。如果球偏離中心,則電動機將轉動更多,而當球更靠近中心時,電動機將轉動更少。
這就是代碼的工作原理。
注意:如果您要使用代碼,則必須安裝OpenCV。此外,如果電機轉向錯誤,只需將進入L289N的電線反轉,或反轉連接到Pi的控制gpio線。
-
相機
+關注
關注
4文章
1435瀏覽量
54490
發布評論請先 登錄
工業相機在焊縫跟蹤中的關鍵作用有哪些
使用CY3014USB芯片組制作了一臺相機,視頻顯示延遲怎么解決?
索尼推出首款攝像機跟蹤系統OCELLUS
松下MPS媒體制作平臺 第十一篇:深入探索自動跟蹤插件(第二部分)

松下MPS媒體制作平臺之自動跟蹤插件(第一部分)

開源項目!打造一款FPV頭部追蹤相機,讓你仿佛置身遙控車之中!



熔池監控相機的原理是什么





 工商網監
工商網監
評論