 機器人頭盔的制作教程
機器人頭盔的制作教程

第1步:收集材料

技術資料:
4 x標準伺服
連接線
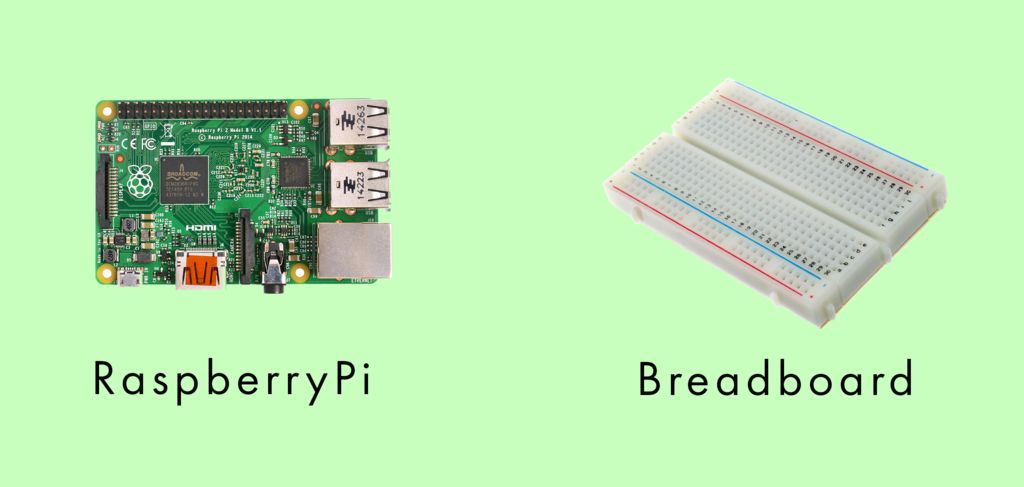
1 x迷你面包板
1 x Raspberry Pi
建筑材料:
激光切割亞克力部件
管道膠帶
雙面膠帶
機器螺釘
電纜扎帶
其他:
3 x 2.5“乘3”的親人照片
1 x自行車頭盔
2 x 9V電池
3 x 8“木釘桿
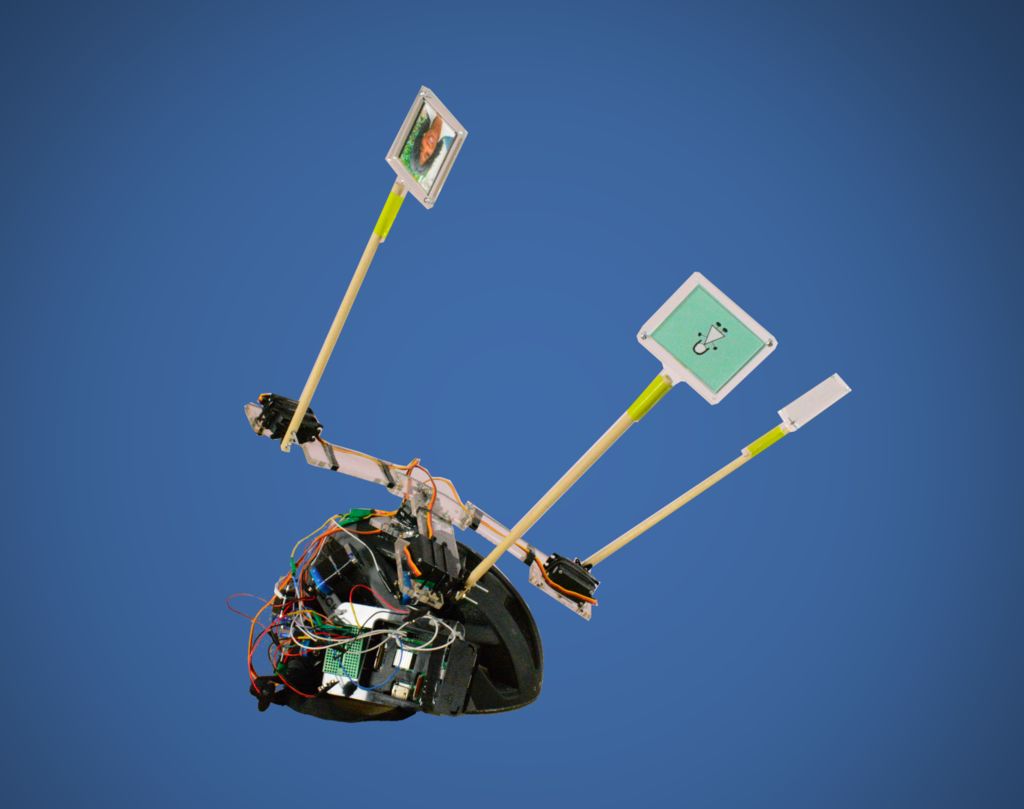
第2步:組裝頭盔
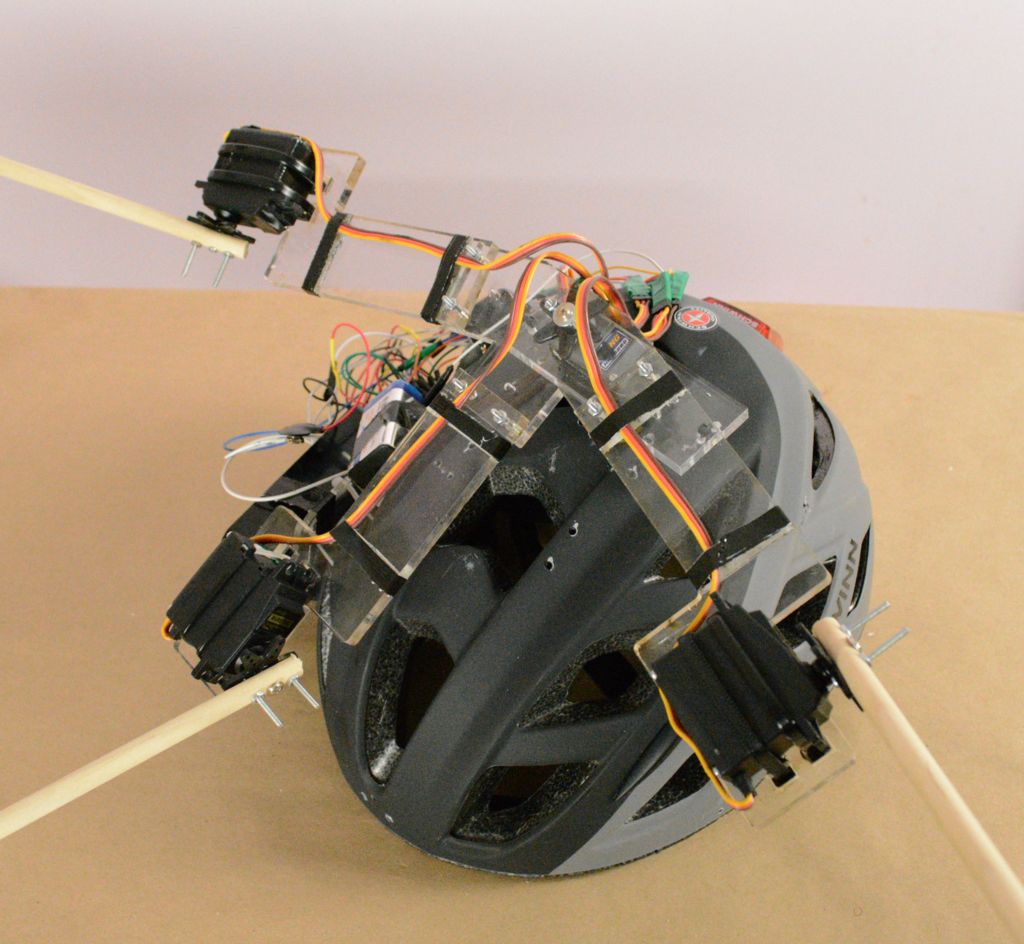




此機器人由兩個主要組成零件:
旋轉的照片架,可以將您所愛的人的照片移到您的面前。
允許您設置自定義主題標簽的Twitter API代碼從Twitter接收數據。
在這一步中,我們將組裝位于頭盔頂部的圖片旋轉機制。
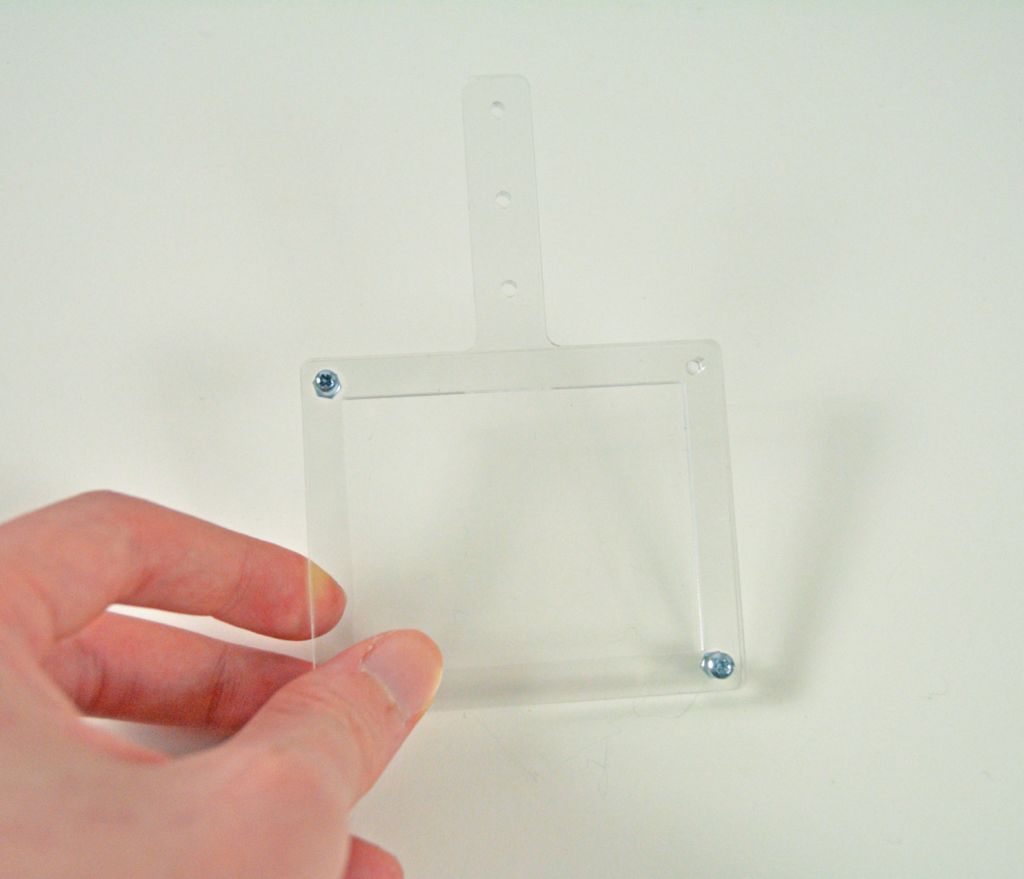
組裝圖片框架:
在.dxf文件中,“Lasercut Parts”,您將看到標有“相框”的矩形塊。取下這些相框并使用它們把你的家人和朋友的照片夾在中間。這可以使用四個機器螺釘完成。
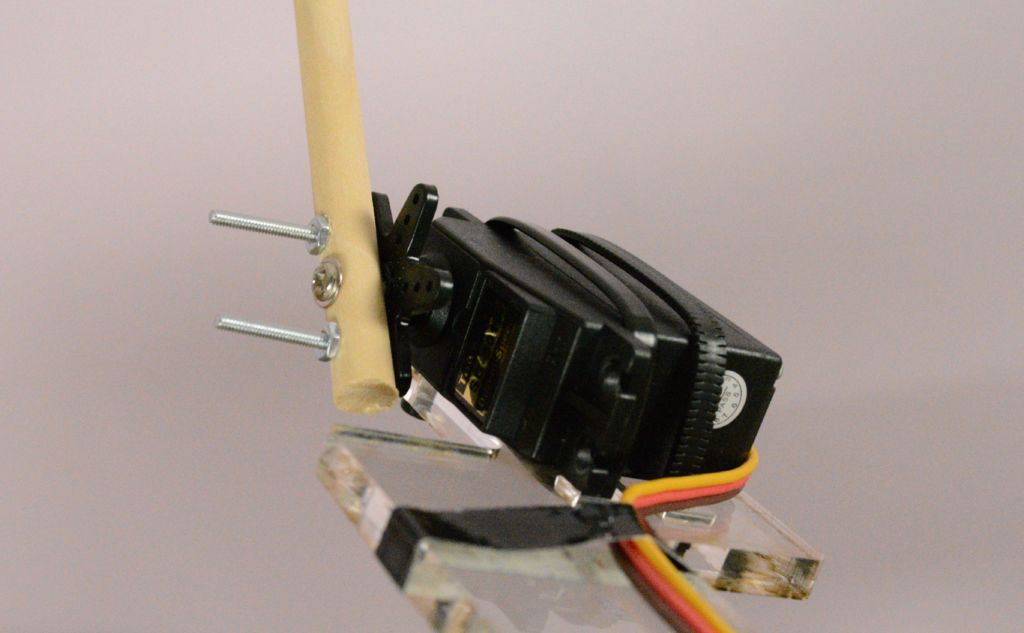
將圖片放入框架后,取下3根木釘,然后用膠帶將它們固定到框架上。完成此步驟后,您需要將每個銷釘連接到頭盔頂部的伺服電機上。這可以通過在銷釘的非圖片端鉆孔并將它們連接到塑料伺服喇叭來完成。 注意:鉆孔時,請確保相框朝向正確,讓您在臉部前方移動時可以看到圖像。
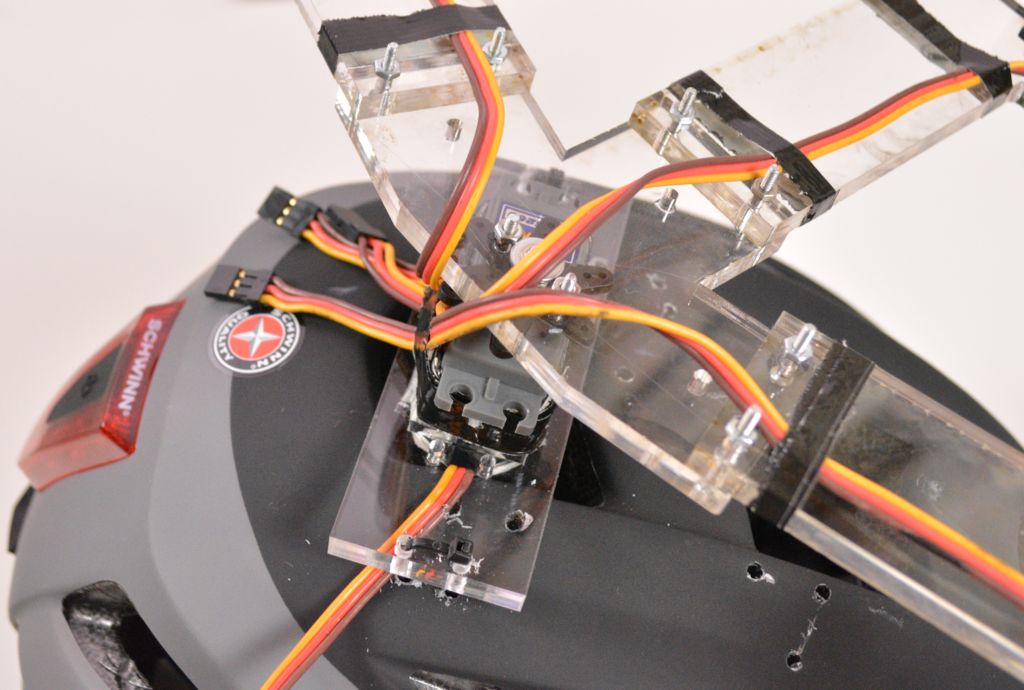
組裝旋轉平臺:
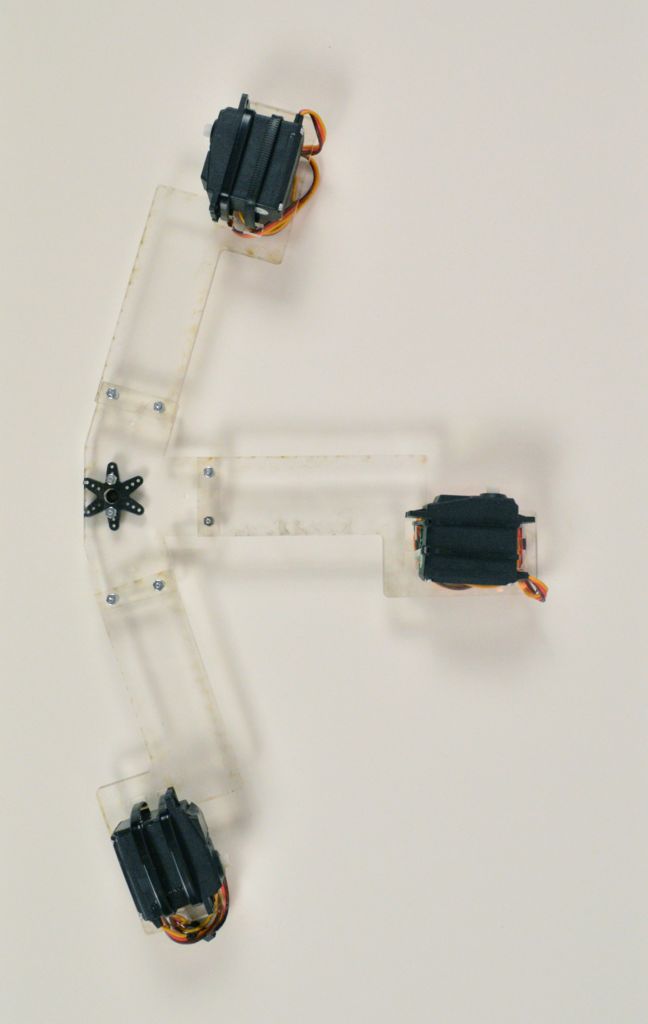
現在,我們將組裝三臂旋轉平臺,該平臺將位于頭盔頂部并固定伺服器。
取下標有“旋轉中心”的丙烯酸片,并使用“旋轉中心”件末端的相應孔連接標有“伺服平臺”的三個部件。
使用束線帶將伺服器連接到“伺服平臺”件。 請務必注意參考圖像中伺服器的方向。
最后,使用塑料伺服喇叭將定位銷桿連接到伺服器上在上一步中附上。
將Axis Servo連接到頭盔:
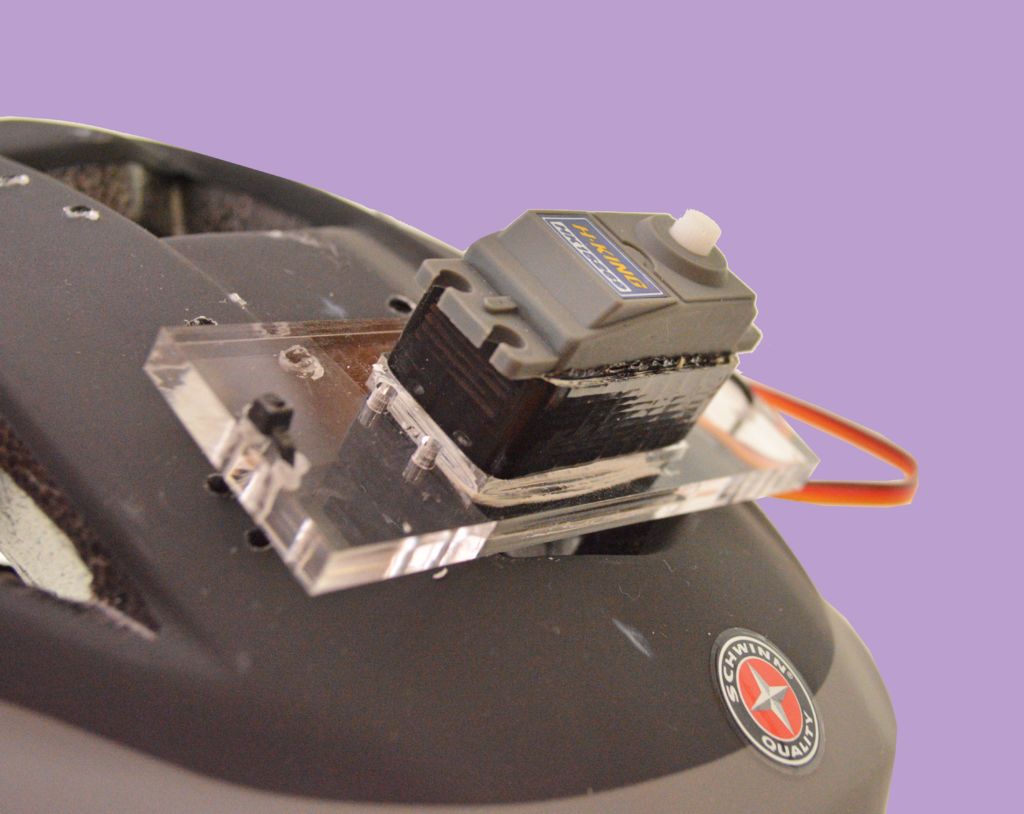
現在,我們將軸伺服系統連接到頭盔頂部。考慮到每個頭盔都不同,您需要找到一個位置來放置伺服器,使其直立。
將剩余的伺服器連接到標有“Axis Servo Holder”的部件上。/li》
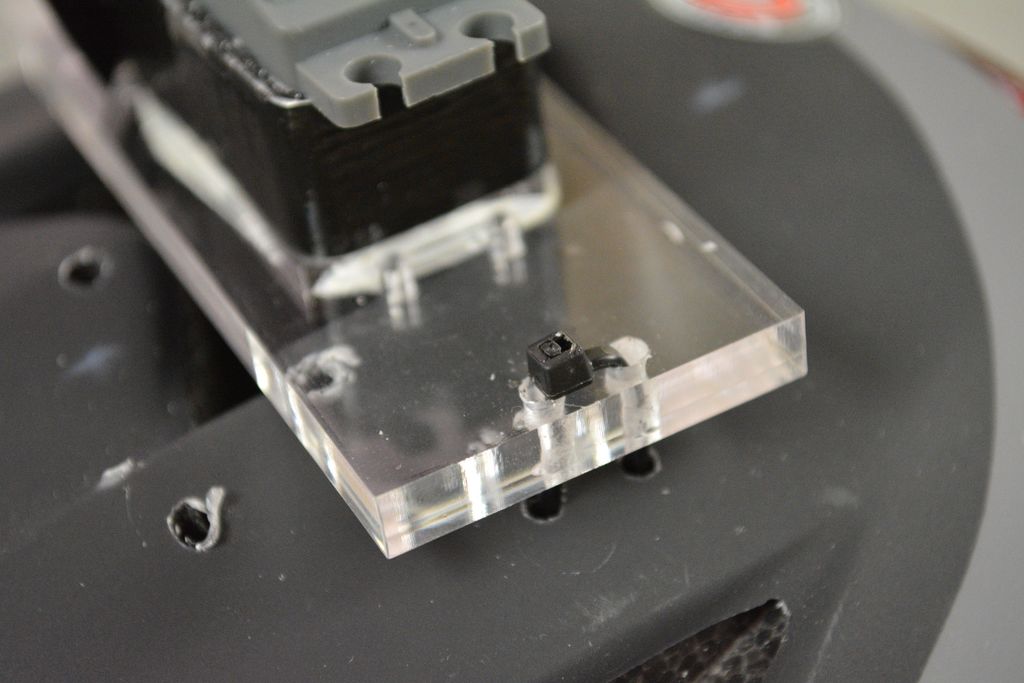
一旦你在頭盔上找到一個允許伺服直立的位置,根據“Axis Servo”中的孔在頭盔頂部鉆四個孔支架,“并使用電纜扎帶連接電機。
最后,將上一步組裝的”旋轉中心“連接到軸伺服。
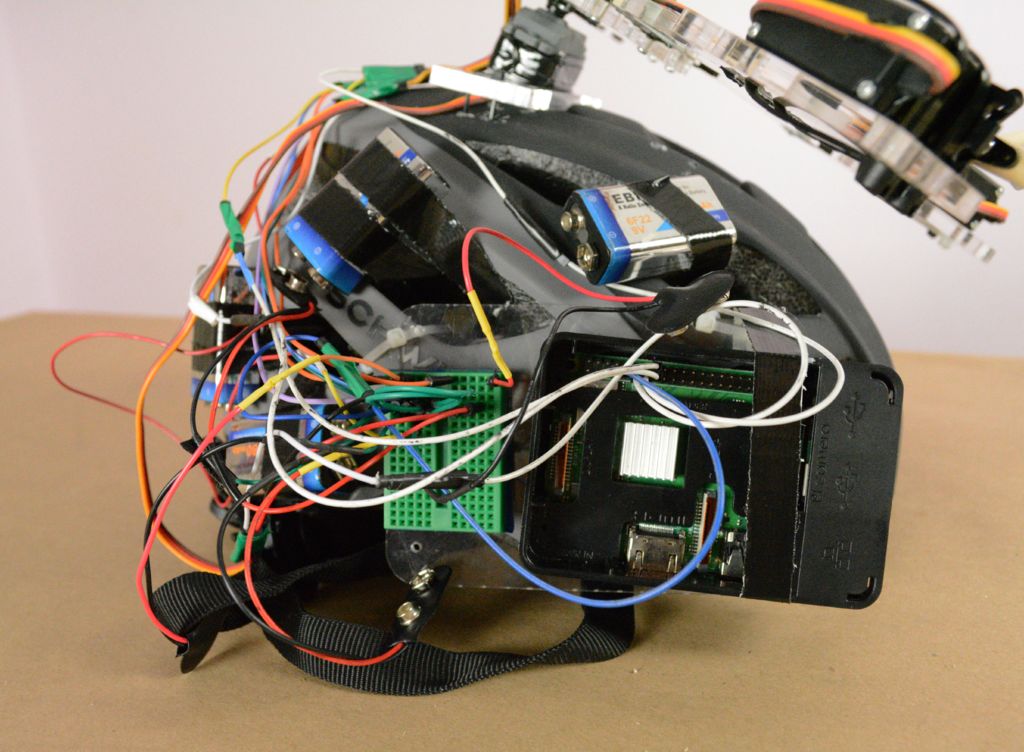
組裝Raspberry Pi平臺:
現在,您將把塑料“Raspberry Pi Holder”連接到頭盔上。這樣您就可以保持Pi和面包板的安全。與前一步驟一樣,支架的確切位置取決于頭盔上的空間大小。
將您的丙烯酸片標記為“Raspberry Pi Holder” “并且,使用兩側的孔,將它連接到頭盔的側面。
如上段所述,確切的位置取決于你,但確保支架不會干擾伺服電機的運動。
使用雙面膠將面包板和Raspberry Pi連接到支架上。
第3步:接線
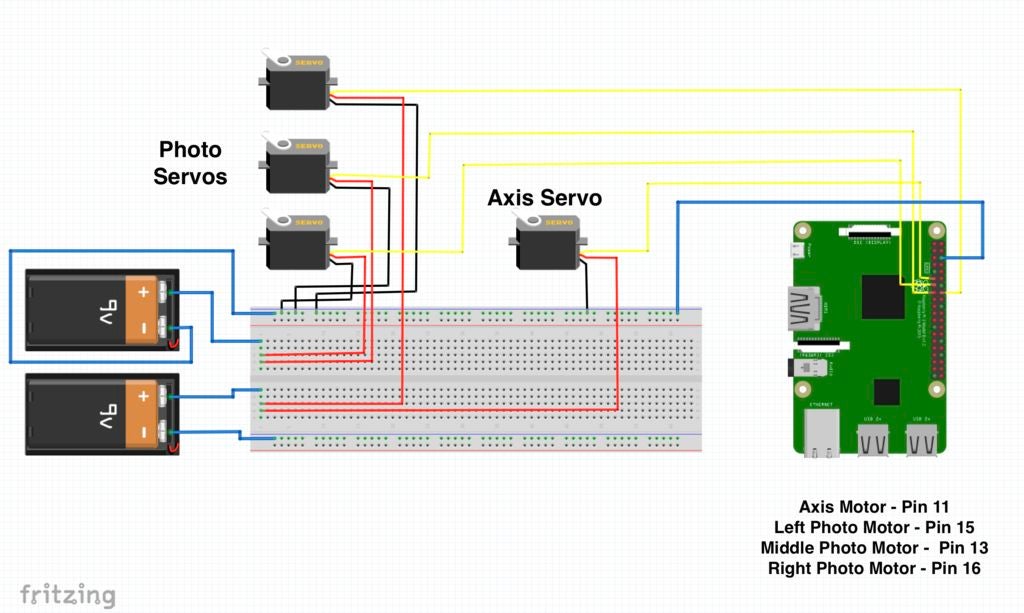
根據Fritzing圖表,將電機連接到Raspberry Pi。一切都連接好后,確保使用電纜扎帶組織電線。
步驟4:上傳代碼
為了從Twitter接收信息,你將需要從您的Twitter帳戶生成訪問令牌。如果您還沒有生成這些令牌,請參閱指示鏈接。
生成訪問令牌后,打開標有“twittercredentials.py”的文件,將您的信息復制并粘貼到相應的行。確保在完成此操作后保存代碼。
接下來,打開文件“HelmetCode.py”并轉到第94行。在這里,您可以插入自定義主題標簽,因此每當您指定的一個主題標簽被推文時,頭盔都會響應。
注意:一定要運行您的代碼在終端
第5步:完成筆記
如果你想要這個頭盔便攜式,你可以使用便攜式手機充電器為你的Raspberry Pi供電。
盡管這個機器人實際上是一個頭盔,但是不要讓電源進入你的頭。形象和字面意思(雙重檢查電線連接)。
-
機器人
+關注
關注
213文章
29735瀏覽量
212850 -
智能頭盔
+關注
關注
1文章
65瀏覽量
10573
發布評論請先 登錄





 工商網監
工商網監
評論