 可控四足機器人的制作教程
可控四足機器人的制作教程

步驟1:準備框架

使用材料支撐打印它,如腳,臀部和大腿
印刷部件清單:
1x基體
1x蓋子
1x電池座
4x臀部(A型和B型)
4x Thight(A型和B型)
4x腳(A型和B型)
4x Shield
12x襯套+ 12x 2mm螺釘
步驟2:組裝機器人框架
按照上面的步驟視頻組裝框架,螺釘用于2mm尺寸的孔
步驟3:電子零件(Wemos D1 Mini)
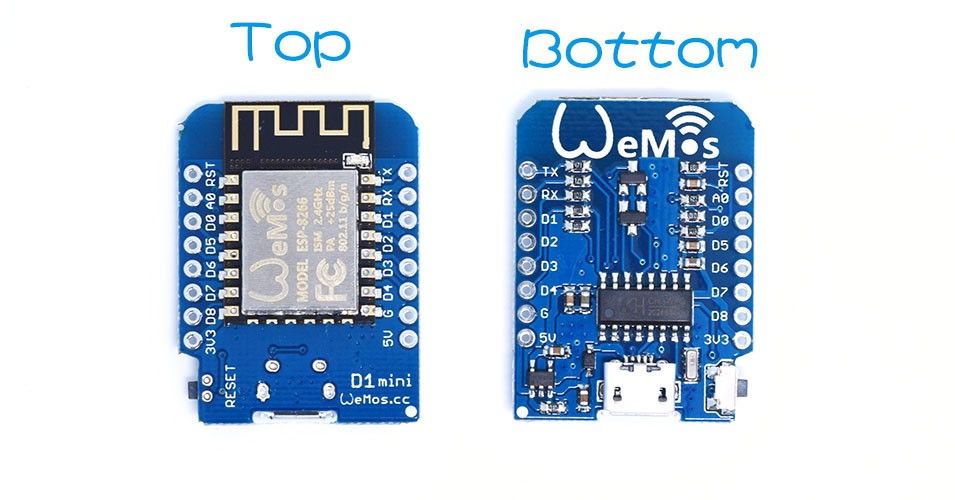
有市場上有很多NodeMCU變體并且基本上具有相同的功能,對于這個項目我選擇Wemos D1 Mini。
這部分將作為我們的四足動物作為接入點的Web服務器。
您需要的只是連接到Quadruped AP并控制機器人的所有運動,也許對于未來的項目,它將顯示您需要的所有傳感器儀表板。..。..
這個D1 mini ,是一款基于ESP-8266EX的迷你WIFI板。它有11個數字輸入/輸出引腳,所有引腳都支持中斷/pwm/I2C/單線(D0除外)1個模擬輸入(3.3V最大輸入)a Micro USB連接
如何入門:
從Arduino網站安裝Arduino 1.6.7。
啟動Arduino并打開“首選項”窗口。
到Additional Boards Manager URL字段中。您可以添加多個URL,用逗號分隔。
打開工具→電路板:xxx→電路板管理器并安裝ESP8266社區的esp8266(安裝后不要忘記從工具》電路板菜單中選擇ESP8266電路板)。
有關詳細信息,請查看上面的視頻
點擊此處在Aliexpress中搜索
對于這個項目,您只需連接此引腳:
NodeMCU RX引腳連接到Arduino Nano TX引腳
NodeMCU TX引腳連接到Arduino Nano RX引腳
NodeMCU G引腳連接到DC-DC mini 5v Stepdown( - )輸出引腳輸出
NodeMCU5V引腳連接到DC-DC mini 5v Stepdown(+)輸出引腳輸出
PS: 對于編程此板,必須斷開連接到arduino的所有引腳和DC-DC降壓,否則你將收到錯誤。..。..
步驟4:電子零件(Arduino Nano)

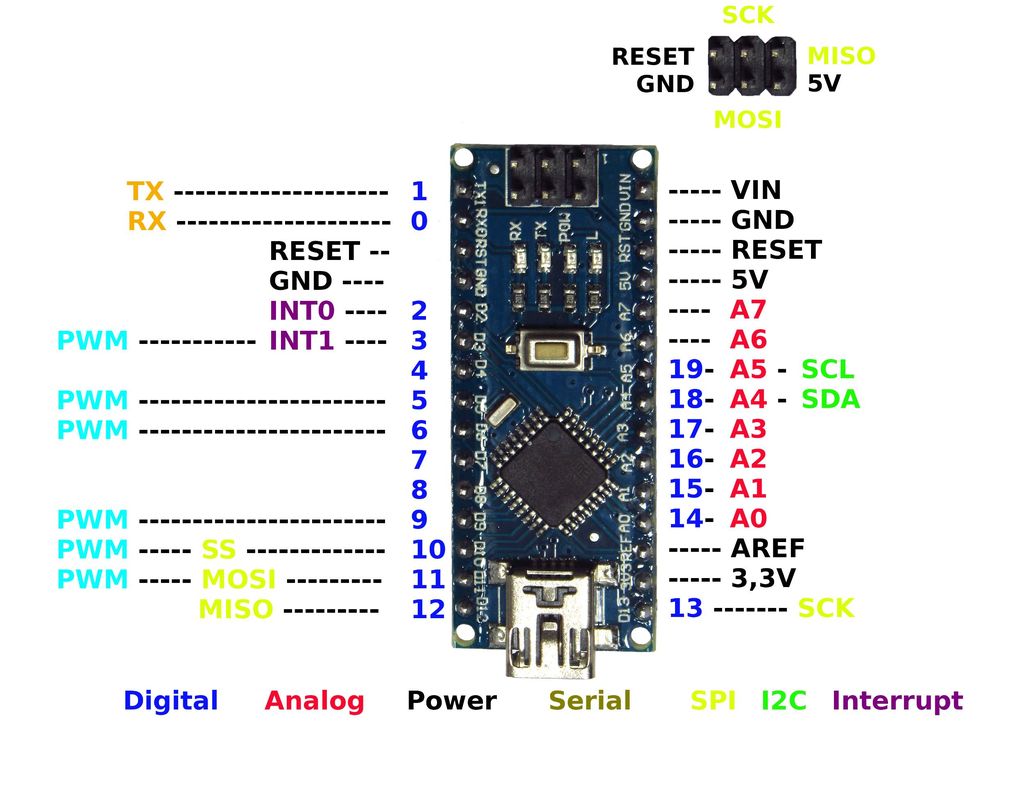
與NodeMCU相同,對于arduino板,你可以使用任何適合你的板,如Arduino Pro Mini,Arduino Nano或其他。
但是對于這個項目,我選擇Arduino Nano,因為我不需要使用太多的針,它很小,不需要FTDI來編程。
點擊這里在Aliexpress中搜索
對于這個項目,我只是使用:
Arduino nano RX引腳連接到NodeMCU TX引腳
Arduino nano TX引腳連接到NodeMCU RX引腳
Ardiono nano A4引腳連接到PCA9685 SDA引腳
Arduino nano A5引腳連接到PCA9685 SCL引腳
Arduino nano GND引腳連接到DC-DC mini 5v Stepdown( - )輸出引腳輸出
Arduino nano 5V引腳連接到DC-DC mini 5v Stepdown(+)輸出引腳輸出
參見上面的架構更多細節
PS:對于編程此板,您必須斷開連接到NodeMCU的所有引腳和DC-DC降壓,否則您將收到錯誤。..
步驟5:電子零件(Tower Pro 9g Micro Servo)

這是最受歡迎的迷你伺服。僅重9克,給你1.5公斤/厘米的扭矩。它的大小非常強大。適用于梁式機器人。
PS:此伺服只能旋轉180度角
主要特點:
?半透明體
?輕量級
?噪音更低規格:
?尺寸:22.6 x 21.8 x 11.4 mm
?連接器導線長度:150 mm
?工作速度(4.8 V無負載):0.12 sec/60°
?失速扭矩(4.8 V):1.98 kg/cm
?溫度范圍:30至60°C(-22至140℉)
?死區寬度:4 usec
?工作電壓:3.5 - 8.4 V
點擊此處在Aliexpress中搜索SG90伺服
步驟6:電子部件(16通道12位PWM/伺服驅動器 - I2C接口 - 用于Arduino的PCA9685)
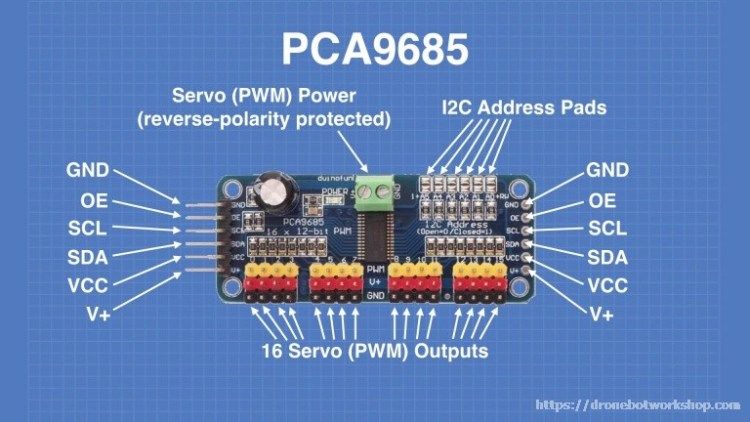
想要制作機器人助行器嗎?但只使用微控制器的PWM輸出數量有限,你會發現自己用完了!不適用于Adafruit 16通道12位PWM/伺服驅動器 - I2C接口。通過這種pwm和伺服驅動器突破,您可以通過兩個引腳控制16個自由運行的PWM輸出!需要運行超過16個PWM輸出?沒問題。將這些美女中的62個連接起來,最高可達992個PWM輸出。
該板/芯片使用0x60-0x80之間的I2C 7位地址,可通過跳線選擇
用于電源輸入的端子塊(或者可以使用側面的0.1“突破)端子塊上的反極性保護輸入綠色電源良好的LED 3針連接器,每組4個,這樣您就可以同時插入16個伺服電機(伺服插頭略大于0.1“,因此您只能在0.1”標頭“堆疊”上相互堆疊4個“鏈式”設計在V +線上放置一個大電容的地方(如果需要的話)在所有輸出線上設置220歐姆串聯電阻以保護它們,并使驅動LED瑣碎的焊接跳線用于6個地址選擇引腳i2c控制的PWM具有內置時鐘的驅動器。與TLC5940系列不同,您無需連續發送信號來占用您的微控制器,它完全自由運行!它符合5V標準,這意味著您可以通過3.3V微控制器控制它并仍然安全驅動高達6V的輸出(當你想要控制白色時,這很有用r具有3.4+正向電壓的藍色LED 6個地址選擇引腳,因此您可以在單個i2c總線上連接其中的62個,總共992個輸出 - 這是許多伺服或LED可調頻率PWM高達約1.6 KHz 12每個輸出的比特分辨率 - 對于伺服系統,這意味著在60Hz更新速率下大約4us分辨率可配置推挽或開漏輸出輸出使能引腳可以快速禁用所有輸出。
單擊此處進行搜索Aliexpress
在這個項目中,所有支路都需要12 CH(每支3CH),將此PCA9685引腳連接到Arduino Nano:
PCA9685 VCC連接到DC-DC迷你5v降壓(+)輸出引腳輸出
PCA9685 GND至DC-DC迷你5v降壓( - )輸出引腳輸出
PCA9685伺服(PWM)電源V +至UBEC(+ )輸出引腳輸出
PCA9685伺服(PWM)電源GND至UBEC( - )輸出引腳輸出
PCA9685 SDA引腳至arduino nano A4引腳
PCA9685 SCL引腳到arduino nano A5 pin
PCA9685 CH0 到 Fro nt Right Thight ,請將電纜顏色與PCA9685插座顏色(黃色,紅色,棕色/黑色)匹配
PCA9685 CH1 至右前方腳,請將電纜顏色與PCA9685插座顏色(黃色,紅色,棕色/黑色)匹配
PCA9685 CH2 至前右髖,請將電纜顏色與PCA9685插座顏色(黃色,紅色,棕色/黑色)匹配
PCA9685 CH4 至右后方,請將電纜顏色與PCA9685插座顏色(黃色,紅色,棕色/黑色)
PCA9685 CH5 匹配到后右腳,請將電纜顏色與PCA9685插座顏色(黃色,紅色,棕色/黑色)
PCA9685 CH6 匹配到右后方臀部,請匹配電纜顏色為PCA9685插座顏色(黃色,紅色,棕色/黑色)
PCA9685 CH8 至前左側光線
PCA9685 CH9 至左前腳 ,請將電纜顏色與PCA9685插座顏色(黃色,紅色,棕色/黑色)
PCA9685 CH10 匹配到左前方臀部,請將電纜顏色與PCA9685插座顏色(黃色,紅色,棕色/黑色)
PCA9685 CH12 匹配到后左上方,請匹配電纜顏色為PCA9685插座顏色(黃色,紅色,棕色/黑色)
PCA9685 CH13 至后左腳,請匹配電纜顏色至PCA9685插座顏色(黃色,紅色,棕色/黑色)
PCA9685 CH14 至后左臀部,請將電纜顏色與PCA9685插座顏色(黃色,紅色,棕色/黑色)
PS:有些PCA9685沒有顏色代碼插座,所以請確保黃色SG90伺服電纜連接到PWM數據引腳,紅色電纜連接到V +引腳,黑色/棕色連接到GND引腳。
步驟7:PWM到伺服引腳連接
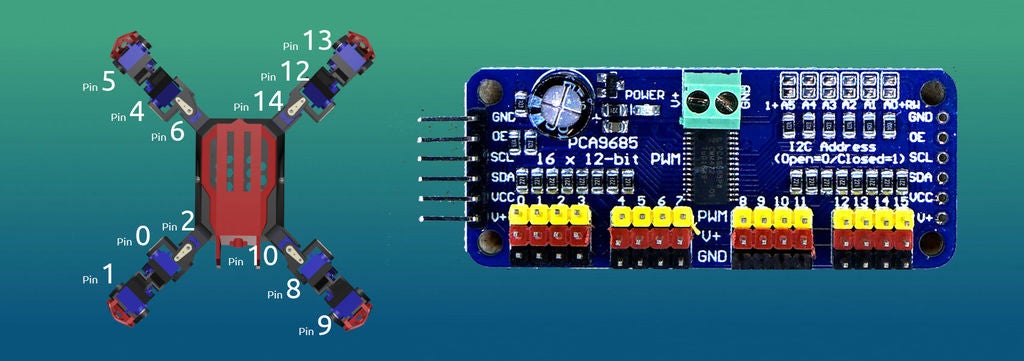
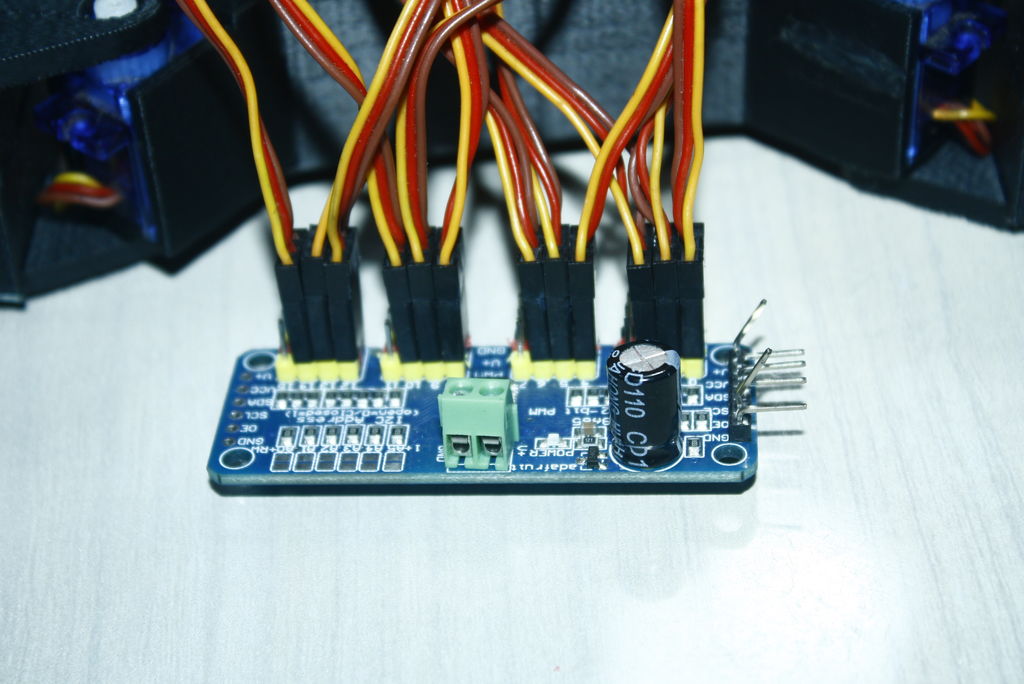
單擊并放大上面的圖片以查看引腳maping在PCA9685與舵機之間
PS:U僅使用16 CH中的12CH進行此項目,所以你仍然需要4CH進行擴展,比如放雷達伺服或者放一些nerf blaster武器。只需在arduino和NodeMCU中添加一個額外的代碼
步驟8:電子零件(UBEC)

3A-UBEC是一款開關模式DC-DC燈調節器,配有2-6節鋰電池組(或5-18節NiMh/NiCd電池),可為您輸出一致的安全電壓接收器,陀螺儀和伺服系統。它非常適合遙控直升機。與線性模式UBEC相比,開關模式UBEC的整體效率更高。
在這個項目中我們使用它為所有伺服電源供電,它具有濾波功能,因此可以降低噪聲,從而影響電機故障,它具有高安培數,足以提升機器人負載。
點擊此處在Aliexpress中搜索
引腳連接:
UBEC(+)RED輸出引腳輸出至PCA9685伺服(PWM)電源V +
UBEC( - )BLACK輸出引腳輸出至PCA9685伺服(PWM)電源GND
UBEC(+)RED輸入至電池(+)引腳
UBEC( - )BLACK輸入到開關引腳
步驟9:電子部件(DC-DC Mini Stepdown)
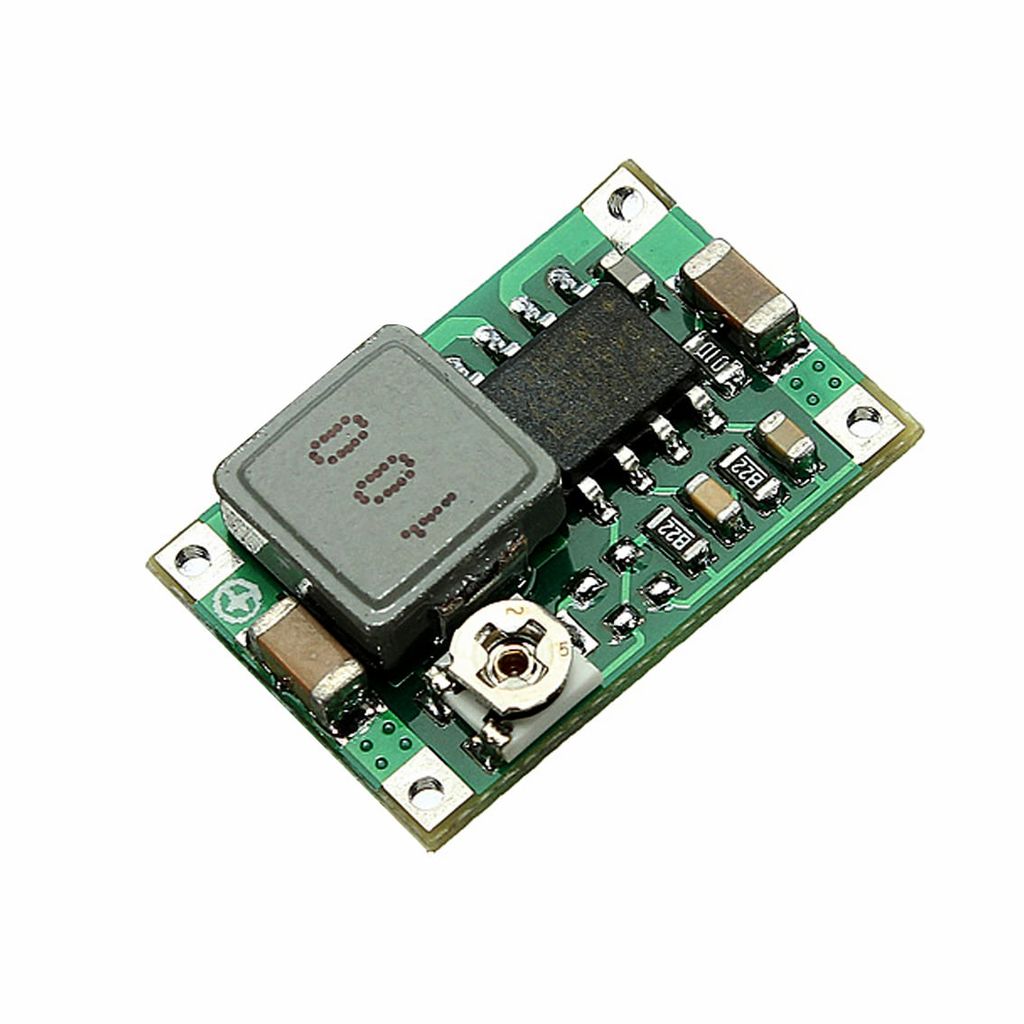

它與UBEC幾乎具有相同的功能,但這只是簡單的DC-DC降壓模塊。它有potensio儀表,我們可以將V(+)輸出從1V調節到17V并且沒有過濾。
點擊這里在Aliexpress上搜索
PS:所以請記住,在使用之前,請使用直流電壓表將V(+)調整為5V輸出
引腳連接:
微型降壓(+)IN至(+)電池
微型降壓( - )IN至開關引腳
微型降壓(+)OUT與NodeMCU(5V),Arduino nano(5V)和PCA9685(VCC)引腳
Mini stepdown( - )OUT與NodeMCU(G),Arduino nano(GND)和PCA9685(GND)引腳并聯
步驟10:其他電子零件



您需要的是(20根或更少電纜)母對母跳線(Aliexpress跳線搜索)
自鎖按鈕開關或u可以使用其他類型的開關(Aliexpress自鎖)切換搜索)
和一對從電池到開關的JST連接器和UBEC/DC-DC降壓(Aliexpress JST連接器搜索)
步驟11 :電源

你可以使用很多電源,對我來說我更喜歡使用可充電的lipo 3S電池。它有11,1伏電流和500mAh或更大的容量(不太多,所以它可以更輕)。
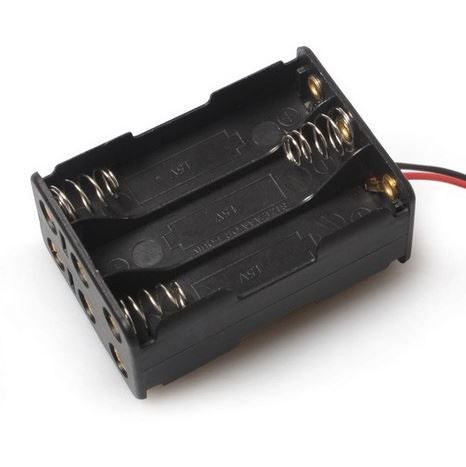
但使用3S脂肪需要一個充電器,它不便宜,所以。..你可以使用其他像AAA電池這樣的電源,你可以串口6節AAA電池,所以它可以產生大約9V的電源,我認為這個機器人有足夠的電量。
點擊此處在Aliexpress中搜索Lipo 3S電池
點擊此處搜索Lipo Charger
點擊這里在Aliexpress中搜索6xAAA電池座
步驟12:線圖
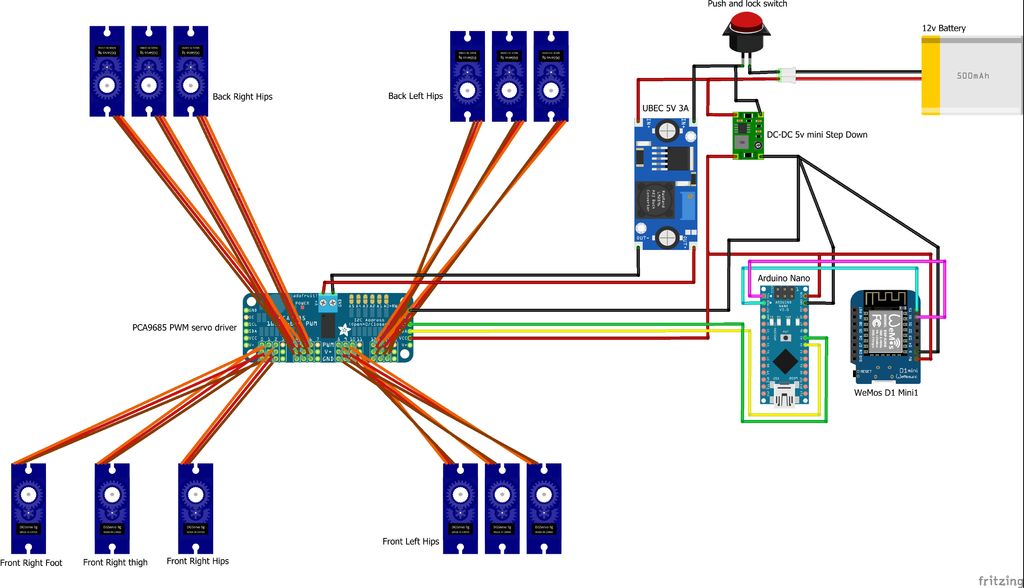
點擊并放大上面的圖片,查看該項目的所有線圖
PS:你需要在某些部分進行一些焊接,并將橡膠頭收縮以密封,以便在電源開關,UBEC和DC-DC降壓之間進行連接。
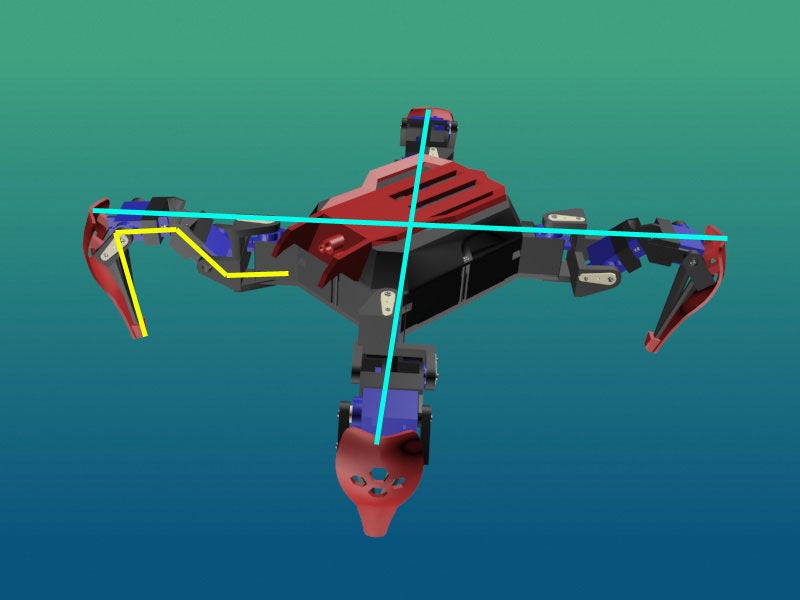
步驟13:編碼和初始姿勢
使用迷你USB連接arduino nano到USB端口電纜(但不要忘記將所有引腳斷開連接到wemos D1 mini和DC-DC降壓)并打開 “spider_driver_open_v3_ESP8266_Rev280918.ino” 并將其閃存到Arduino nano,但不要忘記選擇arduino板到Arduino nano并選擇正確的端口。
接下來是使用micro USB轉USB將Wemos D1 mini連接到電腦(也不要忘記將所有引腳斷開連接到DC-DC降壓和Arduino nano)。然后打開 “ QuadrupetV2_310319_fix_connection_issue.ino ” 并將其閃存到主板上,但在此之前選擇正確的電路板并選擇正確的電路板(更多細節請回到第3步)
完成后你可以將所有引腳重新連接到arduino nano,wemos D1 mini和DC-之間直流降壓并啟動機器人以調整正確的初始姿勢。
INITIAL POSE(見上圖) - 》 盡可能靠近上圖重新調整所有腿。
在給機器人加電后,如果腿部位置與上圖不同,那么:
擰下伺服喇叭并拆下伺服喇叭來自伺服。
轉動腿直到足夠接近初始姿勢
重新連接伺服喇叭并再次對其進行操作
為所有未匹配的腿做一遍
PS:
QuadrupetV2_310419_fix_connection_issue.ino已經修復了一些問題,如難以連接(wifi)和網頁渲染失敗,因為誰在31-3之前刷新舊程序-2019請在上面再次下載
需要安裝一些額外的庫(將其復制到庫文件夾)
https://github.com/wimleers/flexitimer2
的https:。..//github.com/adafruit/Adafruit-PWM-Servo-Dri
的https://github上。 com/kroimon/Arduino-SerialCommand
步驟14:控制機器人
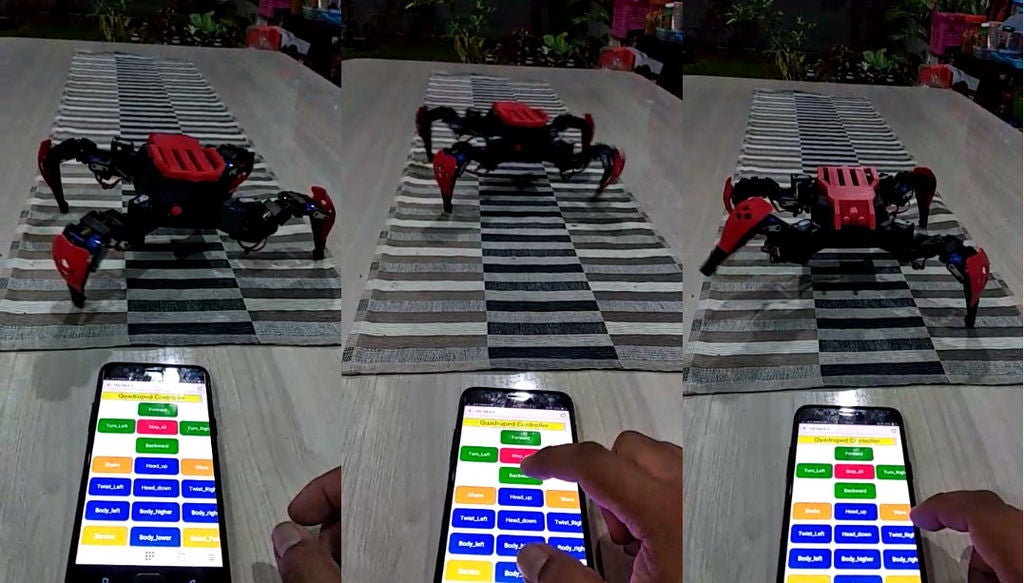
因為這個機器人成了WIFI接入點所以你需要的是:
打開機器人電源
在智能手機上打開wifi設置
使用密碼“12345678”連接到SpiderRobo訪問點
在智能手機上打開Web瀏覽器,然后鍵入http://192.168.4.1
現在你的機器人準備好接受你的命令。..。..
步驟15:打開網頁或連接到AP的問題
我已經修復了這個問題請再次下載上面的步驟13(修復@ 31-4-2019)
一些Wemos D1 mini克隆有一個壞的或缺陷的ESP,它導致:
- 很難連接到AP
- 無法打開頁面
- 加載未完成
-
機器人
+關注
關注
213文章
29730瀏覽量
212837
發布評論請先 登錄
機器人看點:越疆機器人正式發布六足仿生機器狗 智元公布機器人運動控制模型專利
年出貨約2萬臺!中國廠商主導全球四足機器人市場
盤點#機器人開發平臺
智慧水務新突破:四足機器人與威派格河圖AI融合技術首次亮相

開源項目!基于Arduino控制的六足機器人
廣東新支柱產業“拼圖”:深圳這四家人形機器人企業受關注
浙江大學杭州國際科創中心推出全球最快四足機器人
四足機器人的結構、控制及運動控制

四足巡檢機器人特點和作用是什么

廣汽輪足人形機器人,保安外賣家教樣樣來
開源項目!OpenCat—— 一個全能的平價四足機器人
【CW32開發】初探四足機器人

在NVIDIA Isaac Lab中訓練四足機器人運動






 工商網監
工商網監
評論