 全3D打印Arduino機器人的制作
全3D打印Arduino機器人的制作

第1步:記下想法
第一步是如何制作這個機器人。構建所需的所有組件是什么?
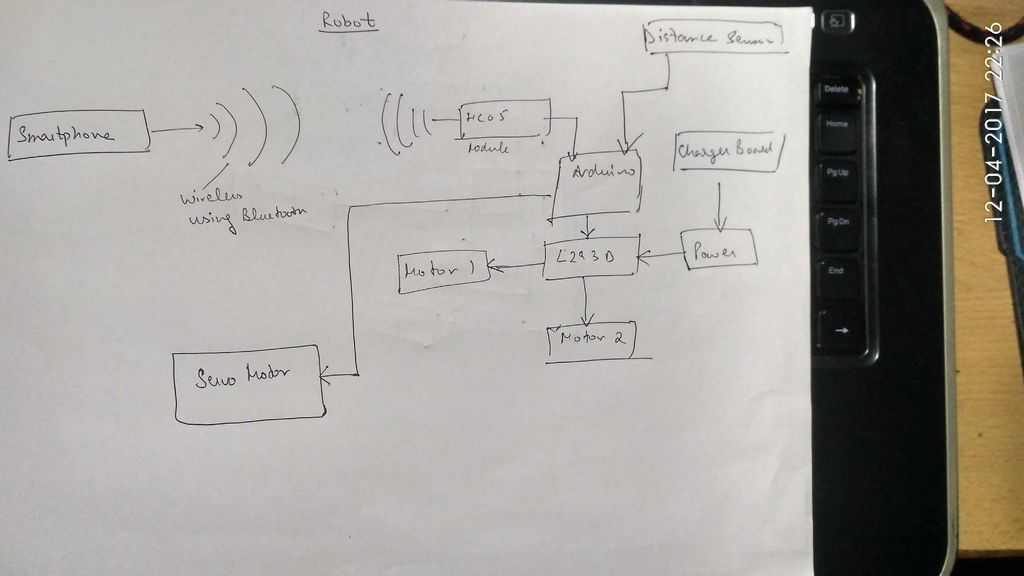
我以流程圖的形式在一張紙上設計了粗略的想法。
我決定了我需要的所有功能機器人以及未來可以做些什么改進。
我也希望這個機器人能夠即插即用,這樣孩子們就可以玩它并享受樂趣并了解它
因為它是用arduino制作的。它非常容易理解。
這個機器人也是完全封閉的,所以非常安全。
所以這一切都記在我腦海里我寫了的想法
我已附上圖片,以便您更好地了解這個項目。
第2步:收集您的組件
以下是必需組件: -
Arduino Pro mini - 5v/16 MHz - (x1)
HC - 05藍牙模塊 - (x1)
18650鋰離子電池 - (x1)
BO直流減速電機300轉 - (x2)
2個車輪或輪胎 - (x2)
DPDT翹板開關 - (x1)
SX1308升壓模塊 - (x1)
TP4056充電模塊 - (x1)
6 mm香蕉插座母 - (x2)
接線端子 - (x3)
Berg帶公母 - (x1)
Sg90伺服電機 - (x1)
Led - (x5)
1K電阻 - (x3)
10K電阻 - (x5)
L293d電機驅動器IC - (x1)
跳線
帶狀電線
HC-SR04距離傳感器模塊 - (x1)
3 X 2 PCB Veroboard - (x1)
第3步:所需工具
以下是構建所需的工具: -
M4內六角螺栓 - (x4)
M3內六角螺栓和螺母 - (x10)
文件
剪線鉗
剝線器
烙鐵
焊料
部分螺絲
FTDI模塊
Castor Wheel
螺絲刀
Allen Key
3D打印機
3D打印細絲
步驟4:需要軟件和應用程序
以下是所需軟件: -
Fusion 360
Arduino IDE
Fritzing
藍牙電子應用程序通過Keuwl soft
Simplify3D或任何其他切片軟件
Android應用的鏈接位于以下位置: - https://play.google.com/store/apps/details?id = com 。..。
步驟5:電路
我設計了電路,因為軟件可以免費使用,非常容易為初學者使用
這個版本的不錯的功能。
我附上了fritzing文件。
如你所知,有些部件缺失了,所以我手工繪制紙張上不同部分的布線。
確定你仔細檢查原理圖。
這里是附加的原理圖文件:
步驟6:電路的工作
電路的工作非常簡單但非常有趣和直觀。所以這是它的工作原理: -
機器人的大腦是arduino pro mini。機器人通過藍牙模塊進行無線通信。
藍牙模塊與智能手機配對,并使用藍牙將數據傳輸給機器人。
Arduino然后處理數據,然后轉動電機如代碼所述開啟或關閉。
對于電源,我使用了兩個并聯的鋰離子電池,因此產生了3.7v 4400 mah的光源。
使用了Sx1308 Boost模塊將電壓從3.7增加到7v。然后,這個升壓電壓傳遞到Arduino的原始引腳,然后為arduino板,伺服電機,距離傳感器和藍牙模塊供電。
對于電池充電,我使用TP4056充電器模塊為這些電池充電從大約5小時完全耗盡到完全充電!!!!
用于驅動電機I使用L293D H橋式電機驅動器IC。這是因為arduino無法處理電機運行所需的電流。
對于自動移動,機器人使用距離傳感器模塊。當在應用程序中激活按鈕時,機器人以自主模式轉動然后行進,如果它找到障礙物而不是停止并左右轉動頭部,然后決定應該在哪里繼續。
第7步:設計機器人
為了設計機器人,我使用了Fusion 360軟件,因為它是免費使用的,并且非常用戶友好。
首先,我大致了解每個部件的尺寸和位置。
然后我開始對其車身進行建模,車身有一個頂部關閉蓋子和一個底部底盤作為主要部件。
為了使整個建模易于理解,我還在Fusion 360中制作了一個動畫視頻,展示了整個機器人的組裝方式。
我制作的鋰離子電池座用于將電池固定到使用M3螺栓和螺母的底盤。
還為距離傳感器安裝了一個安裝支架,將其安裝在伺服電機上。
我還對組件進行了三維建模,以便我可以組裝它們并看到它們正在按預期工作。
我已經附加了融合設計,因此您也可以根據需要進行編輯和使用。
步驟8:3D打印
為了切片Stl文件我使用的是simplify3D,但你可以使用任何其他與你的3D打印機兼容的切片軟件。
我有一個超級便宜的Anet A8 3d打印機,我使用了e sun Pla +我已經附加了所有3d打印模型的stl文件。
以下是我的打印機上的打印設置: -
填充= 30%
圖層高度= 0.2 mm
打印速度= 60 m/s
并且底盤部件印有支架。
步驟9:匯編
組裝電路: -
按照原理圖收集所有組件并開始組裝電路。
將輸出電壓從Sx 1308調整為7 v
然后將它連接到電路板上的兩個電源輸入端子。
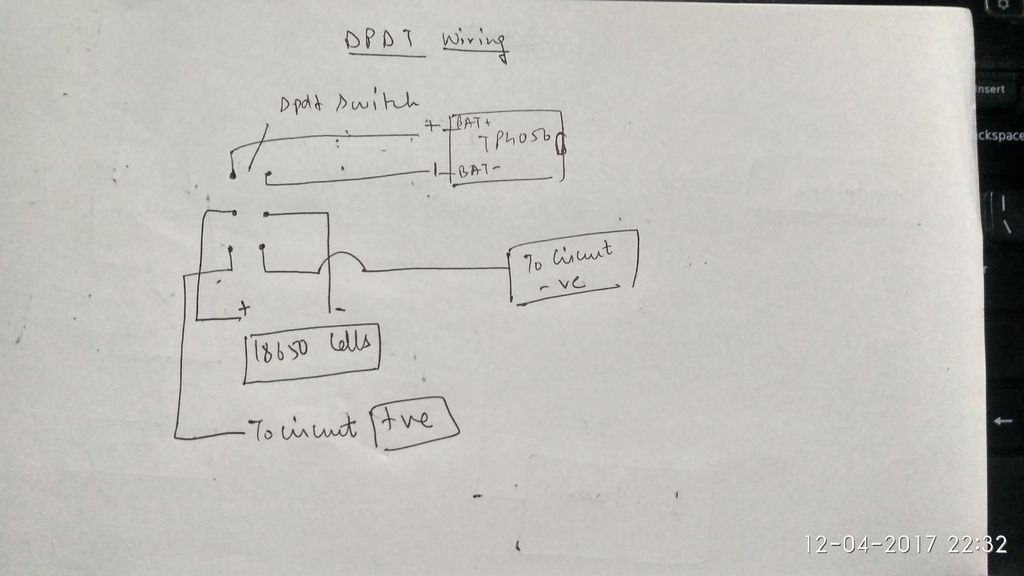
將電路組裝在3×2 PCB上通過DPDT開關將電線焊接到TP4056模塊上。
我已連接DPDT開關接線供您參考。
給機器人充電向一個方向輕拂開關,然后讓機器人向相反方向輕彈開關。
裝配機器人: -
首先從3D中取出3D打印部件打印機床。
首先添加電池,然后使用兩個內六角螺栓和螺母將電池座部件固定好。
然后使用適當的M3螺栓將直流電機連接到機箱上。然后將輪胎添加到電機軸上。
然后使用三個M3螺栓和螺母添加腳輪,然后添加電路并用螺母和螺栓固定。
頂蓋將伺服電機添加到切口中,然后將超聲波距離傳感器安裝到其上。
然后添加開關和其他部分并完成硬件構建。
步驟10:編程機器人
打開arduino IDE軟件然后使用我的草圖并使用FTDI分線板編程arduino pro mini。
確保在將代碼上傳到arduino時斷開藍牙模塊,因為arduino無法同時與PC和藍牙模塊通信。
上傳代碼后重新連接藍牙模塊。
這是arduino草圖: -
步驟11:應用程序
我使用的應用程序是由Keuwl soft開發的藍牙電子產品。
這個應用程序是高度可定制的,非常容易使用。
為了與藍牙模塊進行通信,我們必須進行一些更改。
我附上了一系列可以復制設置的照片。
第12步:結束
所以你有它你有你自己的3D打印Arduino機器人
我附上的代碼是一個基本的代碼和可能會被修改。
你可能想知道為什么機器人前面有一個洞。
那個空間用于添加某種顯示器以便我可以給我的機器人一些表達。
-
機器人
+關注
關注
213文章
29735瀏覽量
212856 -
Arduino
+關注
關注
190文章
6498瀏覽量
192142 -
3D打印
+關注
關注
27文章
3590瀏覽量
112499
發布評論請先 登錄
人形機器人 3D 視覺路線之爭:激光雷達、雙目和 3D - ToF 誰更勝一籌?
基于NVIDIA AI的3D機器人感知與地圖構建系統設計
開源項目!基于Arduino控制的六足機器人
禾賽科技推出面向機器人領域的迷你3D激光雷達
開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu

開源項目!可以自主演奏音樂的尤克里里機器人!
【開源項目】你準備好DIY一款功能強大的機器人了嗎?

開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
透明樹脂材料3D打印服務全透應用案例
3d打印機器人外殼模型ABS材料3D打印噴漆服務-CASAIM
3D打印汽車零部件建模設計3D打印服務






 工商網監
工商網監
評論