















為驗(yàn)證控制方案的正確性和控制效果,則給定以下導(dǎo)彈參數(shù):KM=0.171 7(1/s)、TM=0.085 0(s)、ξM=0.111 2、T1=6.521 7(s)、KMx=170.778 9、TMx=1.006 3(s)分別對(duì)舵機(jī)系統(tǒng)、縱向通道系統(tǒng)、橫向通道系統(tǒng)、滾動(dòng)通道系統(tǒng)加入單位階躍信號(hào)進(jìn)行數(shù)字仿真,并對(duì)傳統(tǒng)控制系統(tǒng)進(jìn)行仿真,對(duì)比控制結(jié)果。圖4為舵機(jī)系統(tǒng)時(shí)域階躍響應(yīng)曲線。由圖4仿真曲線看出,超調(diào)量9.5%,上升時(shí)間41.9 ms,調(diào)節(jié)時(shí)間(2%誤差帶)88.8 ms,穩(wěn)態(tài)誤差為0。

圖5為縱向通道時(shí)域階躍響應(yīng)曲線,從圖5仿真曲線可看出,在精確考慮舵機(jī)環(huán)節(jié)情況下,PID校正環(huán)節(jié)縱向通道時(shí)域階躍響應(yīng)曲線反應(yīng)良好,超調(diào)量11.4%,上升時(shí)間170.6 ms調(diào)節(jié)時(shí)間(2%誤差帶)356.3 ms,穩(wěn)態(tài)誤差為0。
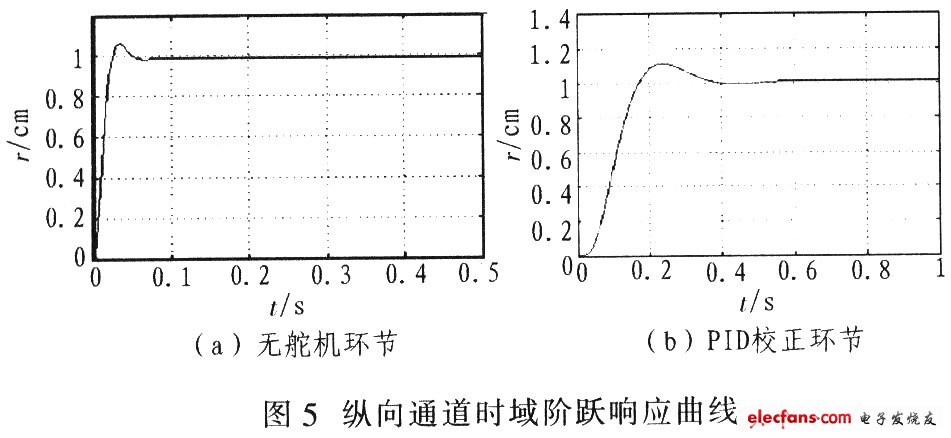
圖6為橫向通道時(shí)域階躍響應(yīng)曲線。從圖6仿真曲線看出,在精確考慮舵機(jī)環(huán)節(jié)情況下,PID校正環(huán)節(jié)橫向通道時(shí)域階躍響應(yīng)曲線反應(yīng)良好,超調(diào)量11.4%,上升時(shí)間168.3 ms調(diào)節(jié)時(shí)間(2%誤差帶)347.1 ms,穩(wěn)態(tài)誤差為0。
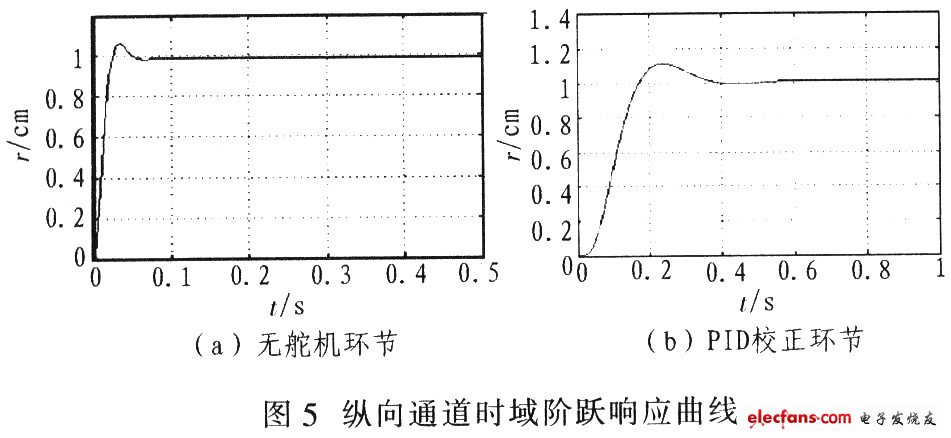
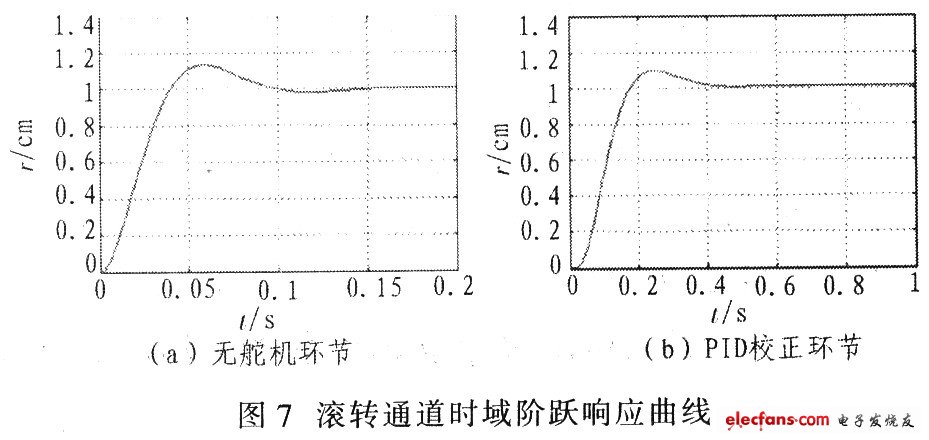
圖7為滾轉(zhuǎn)通道時(shí)域階躍響應(yīng)曲線。從圖7的仿真曲線可看出,在精確考慮舵機(jī)環(huán)節(jié)的情況下,PID校正環(huán)節(jié)滾轉(zhuǎn)通道的時(shí)域階躍響應(yīng)曲線反應(yīng)良好,超調(diào)量9.81%,上升時(shí)間為178.6 ms,調(diào)節(jié)時(shí)間(2%誤差帶)397.1 ms,穩(wěn)態(tài)誤差為0。
5 結(jié)論
本文利用臨界比例度法得到PID參數(shù),利用MATLAB/Simulink進(jìn)行時(shí)域仿真,從仿真結(jié)果看,該P(yáng)ID分通道控制方法可以提高傳統(tǒng)氣動(dòng)舵導(dǎo)彈控制系統(tǒng)的準(zhǔn)確性、快速性及穩(wěn)定性。當(dāng)然這只是給出與傳統(tǒng)控制方案相比較的結(jié)果,實(shí)際的參數(shù)還要在實(shí)物仿真中不斷調(diào)試,并對(duì)控制系統(tǒng)修正改進(jìn),以得到令人滿意的控制效果。仿真結(jié)果表明,各通道系統(tǒng)反映良好,能夠?qū)崿F(xiàn)實(shí)時(shí)控制要求。








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
用戶評(píng)論
共 0 條評(píng)論