















舵面的鉸鏈力矩對舵機的影響很大,飛行控制系統(tǒng)采用閉環(huán)回路設(shè)計,消除其影響。舵回路一般采用位置和速度兩種反饋補償方式消除鉸鏈力矩對其的影響。
位置反饋的傳遞函數(shù)為:
當(dāng)
 因此,引入較強反饋,電機輸出轉(zhuǎn)交正比于輸入電壓,與反饋量成正比,而與鉸鏈力矩的大小無關(guān)。
因此,引入較強反饋,電機輸出轉(zhuǎn)交正比于輸入電壓,與反饋量成正比,而與鉸鏈力矩的大小無關(guān)。速度反饋的傳遞函數(shù)為:
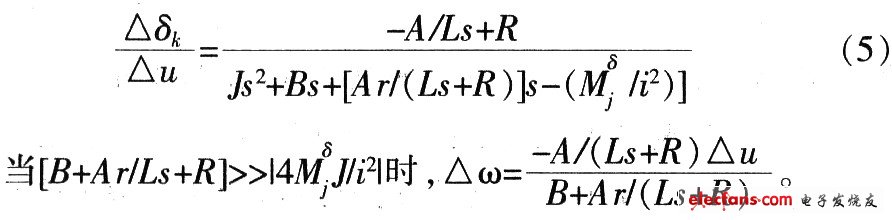
根據(jù)以上分析,引入較強速度反饋時,則電機輸出角速度正比于輸入電壓,而與飛行狀態(tài)即鉸鏈力矩的大小無關(guān)。
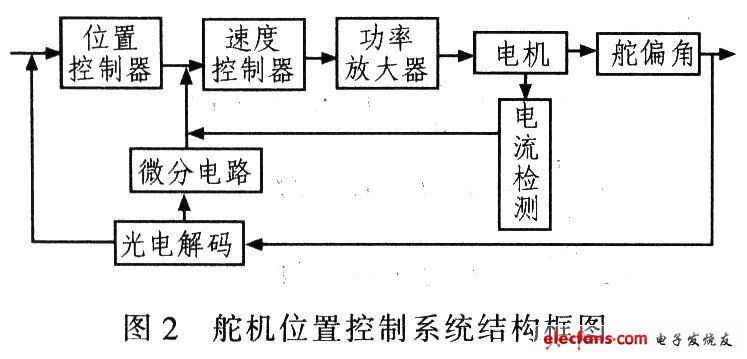
因此,舵機位置控制系統(tǒng)的系統(tǒng)結(jié)構(gòu)如圖2所示。
3 分通道PID控制
導(dǎo)彈飛行姿態(tài)是通過控制導(dǎo)彈的3個舵面(即升降舵、方向舵、滾動舵)的偏轉(zhuǎn),改變舵面的空氣動力特性,形成圍繞導(dǎo)彈質(zhì)心的旋轉(zhuǎn)矩,實現(xiàn)飛行姿態(tài)的改變。角位置控制分為3個通道,俯仰通道(控制俯仰角)、偏航通道(控制偏航角)、滾動通道(控制滾動角)。
3.1 舵機的PID控制
根據(jù)圖2所示的舵機位置控制系統(tǒng)結(jié)構(gòu)框圖,其中電流環(huán)節(jié)采用電流計反饋,轉(zhuǎn)速反饋用速測發(fā)電機,位置反饋用光電編碼器。舵機采用三閉環(huán)控制設(shè)計,即電流環(huán),轉(zhuǎn)速環(huán)和位置環(huán)。可用“臨界比例度法”初步確定PID參數(shù)。此方法適用于已知對象傳遞函數(shù)的場合,閉合的控制系統(tǒng)中將調(diào)節(jié)器置于純比例作用下。從大到小逐漸改變調(diào)節(jié)器的比例度,得到等幅振蕩的過渡過程。此時的比例度成為臨界比例度δk,相鄰兩個波峰間的時間間隔稱為臨界振蕩周期Tk,由此計算出各個參數(shù),即Kp、Ti、Td的值。
3.2 縱向通道控制
傳統(tǒng)的控制方案是將舵機簡化為一個放大環(huán)節(jié),系統(tǒng)僅存在角速度反饋,其縱向通道傳遞函數(shù)為:

式中,KM為傳遞系數(shù),TM為時間常數(shù),ξM為相對阻尼系數(shù),T1為氣動力常數(shù)。
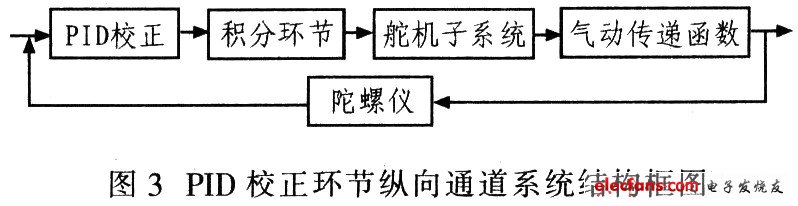
在設(shè)計精確考慮舵機環(huán)節(jié)的縱向通道時,需加入PID校正環(huán)節(jié),分析系統(tǒng)使其滿足設(shè)計要求,圖3為其控制系統(tǒng)結(jié)構(gòu)框圖。
3.3 橫向通道控制
當(dāng)滾動通道的輸入指令為零時,即保持滾動角和角速度為零,則消除了俯仰通道和偏航通道的耦合作用,可分別控制3個通道。此時,對稱結(jié)構(gòu)導(dǎo)彈的俯仰通道和偏航通道的控制基本相同。
3.4 滾動通道控制
將舵機環(huán)節(jié)引入滾動通道,與縱向通道及航向通道類似,引入PID校正環(huán)節(jié),分析系統(tǒng),其角速度傳遞函數(shù)為:

式中,KMx為傳遞系數(shù),TMx為傾斜時間常數(shù)。








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
用戶評論
共 0 條評論