納雷科技NSR300WVF:納雷科技雷球聯(lián)動是基于毫米波雷達(dá)+視覺融合的系統(tǒng),雷達(dá)掃描系統(tǒng)具有主動探測并對區(qū)域進(jìn)行實時掃描,其在探測的同時可將探測目標(biāo)的位置信息同步傳輸給球機(jī),對鎖定目標(biāo)進(jìn)行導(dǎo)引,球機(jī)可以在第一時間捕捉被探測目標(biāo)并對其進(jìn)行軌跡跟蹤、預(yù)測等功能,實現(xiàn)雷球聯(lián)動。
2018-09-25 14:28:43 9103
9103 描述可穿戴設(shè)備需要高級電源管理在實現(xiàn)常開式功能的情況下使電池運(yùn)行較長的時間。此外,設(shè)備需要使用小型可充電電池并支持小尺寸設(shè)計。本應(yīng)用手冊顯示了 如何實現(xiàn)適用于可穿戴設(shè)備的可擴(kuò)展電源管理解決方案,該
2018-12-07 11:52:55
多目標(biāo)優(yōu)化算法有哪些,該文圍繞包含柴油發(fā)電機(jī)、風(fēng)力發(fā)電、光伏發(fā)電和鉛酸蓄電池的獨立微網(wǎng)系統(tǒng)中的容量配置問題,提出了包含微網(wǎng)全壽命周期內(nèi)的總成本現(xiàn)值、負(fù)荷容量缺失率和污染物排放的多目標(biāo)優(yōu)化設(shè)計模型。該
2021-07-12 06:52:54
。
?啟用Arm DS版本的Arm DS許可證。如果您無法找到解決方案
此處的問題:
? 單擊“我需要幫助調(diào)試我的目標(biāo)”。我該去哪里?
? 訪問軟件工具社區(qū),在那里你可以向Arm專家提問。
2023-08-02 06:50:15
到后端數(shù)據(jù)庫。 該解決方案為制造商提供了高度準(zhǔn)確的生產(chǎn)設(shè)備信息,其中包括位置、狀態(tài)以及時間參數(shù)。 作為完全集成的軟硬件解決方案,這款PCB跟蹤解決方案能夠以較低成本實現(xiàn)快速部署與擴(kuò)展,只需相應(yīng)
2018-08-31 11:40:17
轉(zhuǎn)帖:matlab實現(xiàn)視頻中動態(tài)目標(biāo)跟蹤。 [hide] [/hide]
2012-03-13 14:12:15
申請理由:我們實驗室是主要研究多媒體信號處理的,目前正在研究基于ARM的牧寶跟蹤系統(tǒng)實現(xiàn),簡而言之,就是要在ARM這個平臺上做出一個具有目標(biāo)跟蹤功能的嵌入式系統(tǒng)。項目描述:本實驗室目前正在做的這個
2016-01-18 16:23:54
硬件平臺,運(yùn)用散點聚類、軌跡跟蹤、特征提取技術(shù)快速識別目標(biāo)。對算法的功能需求、數(shù)據(jù)流向、運(yùn)算流程和處理結(jié)果,進(jìn)行了詳細(xì)闡述。實踐結(jié)果表明,該識別算法具有很強(qiáng)的實用性。關(guān)鍵詞多目標(biāo) 運(yùn)動軌跡 實時濾波 嵌入式平臺1 功能需求空間觀測對象復(fù)雜多變,且真、偽兩種目標(biāo)在尺寸、亮度、形態(tài)方面既...
2021-12-21 07:02:06
目標(biāo)檢測、識別和跟蹤、火焰及煙霧檢測報警等功能。當(dāng)運(yùn)動目標(biāo)進(jìn)入球形攝像機(jī)的視場范圍內(nèi),利用高速DSP芯片在前一幀圖像和現(xiàn)在的圖像進(jìn)行差分計算,當(dāng)達(dá)到某個特定數(shù)值,判定一幀中的某個特定部分為移動物體,然后
2008-12-29 13:49:05
實現(xiàn)快速身份識別,實現(xiàn)智能預(yù)警。 動態(tài)人臉技術(shù)優(yōu)選解決方案:采用狀辨識機(jī)理減少復(fù)雜背景的干擾可檢測左右旋轉(zhuǎn)小于等于30度,上下旋轉(zhuǎn)小于等于15度的人臉人臉檢測/捕獲率高準(zhǔn)確的人臉跟蹤,為每人抓拍多張
2018-08-01 15:53:47
Chirp SonicTrack超聲波控制器跟蹤解決方案有哪些主要特點和優(yōu)點?Chirp SonicTrack超聲波控制器跟蹤解決方案有哪些應(yīng)用?
2021-07-30 06:04:19
攝像頭一臺不夠廣
出現(xiàn)監(jiān)控盲區(qū),讓小偷有可趁之機(jī)
只能裝兩臺、三臺、四臺......
硬件成本、時間成本大大增加?
為解決客戶此類場景問題
喬安槍球聯(lián)動360全景WiFi攝像頭
2023-05-24 10:47:38
,AVT31不是單純的視頻目標(biāo)取差器,而是一個完整的自動視頻跟蹤系統(tǒng)解決方案。內(nèi)置多種圖像增強(qiáng)預(yù)處理算法:白熱、黑熱、雙極性、移動目標(biāo)檢測等。視頻捕獲:可根據(jù)目標(biāo)的亮度、尺寸、外形比例、速度、運(yùn)動方向等
2013-10-22 10:27:01
本帖最后由 mr.pengyongche 于 2013-4-30 02:54 編輯
基于DSP的雷達(dá)多目標(biāo)模擬器的設(shè)計和實
2012-08-17 13:59:49
目標(biāo)投影到雷達(dá)坐標(biāo)系中,最后對視頻目標(biāo)和雷達(dá)目標(biāo)進(jìn)行融合跟蹤處理。以上只是最基礎(chǔ)的功能需求,在這個新賽道中,各家制造商也為雷視融合一體機(jī)添加了更多功能,以滿足更多場景下的使用需求。首先, 需要對全息
2023-02-17 16:22:15
的基于FET3568J-C核心板的雷視融合一體機(jī)解決方案,希望能夠為您的選型提供幫助。雷視一體機(jī)作為構(gòu)建智慧交通、智慧城市的重要組成部分,大幅度提高了道路的綜合交通感知能力,提升了目標(biāo)的精準(zhǔn)性,它的廣泛部署,可實現(xiàn)
2022-10-09 16:40:33
和大小,得到當(dāng)前幀中目標(biāo)的尺寸和質(zhì)心位置。在介紹Intel公司的開源OpenCV計算機(jī)視覺庫的基礎(chǔ)上,采用CAMSHIFT跟蹤算法,實現(xiàn)運(yùn)動目標(biāo)跟蹤,解決了跟蹤目標(biāo)發(fā)生存在旋轉(zhuǎn)或部分遮擋等復(fù)雜情況下的跟蹤
2014-12-23 14:21:51
視頻目標(biāo)跟蹤,本文將首先向大家介紹常用的粒子濾波視頻目標(biāo)跟蹤算法,對其原理進(jìn)行簡單的分析,為后續(xù)進(jìn)一步選擇和應(yīng)用算法實現(xiàn)目標(biāo)跟蹤提供基礎(chǔ)。一、機(jī)器視覺及相關(guān)理論及OpenCv 機(jī)器視覺是人工智能領(lǐng)域正在
2018-09-21 10:42:31
如何用labview編程實現(xiàn)目標(biāo)框選跟蹤,camshift算法?請高手們幫幫忙,急求
2013-03-18 10:47:43
目標(biāo)跟蹤算法,并實現(xiàn)穩(wěn)定、可靠而精確的目標(biāo)跟蹤意義重大。 本文選用當(dāng)今最為流行、應(yīng)用最廣泛的雷達(dá)和紅外作為傳感器,在紅外/雷達(dá)雙模導(dǎo)引頭的多傳感器平臺下展開研究,設(shè)計并仿真實現(xiàn)了更接近真實的軍事與民用
2018-12-05 15:16:23
進(jìn)行驗證。能夠實現(xiàn)LFMCW雷達(dá)多目標(biāo)檢測方法的硬件電路設(shè)計。弄清LFMCW雷達(dá)的工作原理,系統(tǒng)中傳輸?shù)男盘柼攸c;研究檢測算法的特點,用verilog語言實現(xiàn)檢測算法,在獲得滿意仿真結(jié)果的基礎(chǔ)上,完成電路的FGPA驗證分析。QQ2784829569
2018-04-08 23:48:36
坑道遠(yuǎn)距離移動目標(biāo)進(jìn)行非接觸式信息采集處理,實現(xiàn)對人、車、物在不同狀態(tài)(移動、靜止)下的自動識別,從而實現(xiàn)目標(biāo)的自動化管理。 該產(chǎn)品集成了技術(shù)含量很高的無線射頻識別技術(shù),采用雙頻點長短波頻率實現(xiàn)可靠
2010-01-14 10:30:35
自動跟蹤目標(biāo),自動進(jìn)行聚焦調(diào)節(jié),回傳圖像并向監(jiān)控中心發(fā)出報警信號。自動圖像識別跟蹤可對一個人進(jìn)行行為分析,如某人在高速球設(shè)定的區(qū)域內(nèi)活動,網(wǎng)絡(luò)高速球的圖像會自動跟蹤,在某些特殊且很重要場合某人丟棄某些
2008-08-26 12:45:27
本帖最后由 shkslc 于 2013-10-10 10:25 編輯
跟蹤算法簡介AVT21提供了多種跟蹤算法:質(zhì)心跟蹤算法(Centroid)、多目標(biāo)跟蹤算法(MTT)、相關(guān)跟蹤算法
2013-09-29 08:59:37
,并具有良好的普適性。因此,AVT31不是單純的視頻目標(biāo)取差器,而是一個完整的自動視頻跟蹤系統(tǒng)解決方案。內(nèi)置多種圖像增強(qiáng)預(yù)處理算法:白熱、黑熱、雙極性、移動目標(biāo)檢測等。視頻捕獲:可根據(jù)目標(biāo)的亮度、尺寸
2013-09-05 11:14:16
要求是:采用CMOS攝像頭高速采集圖像信息,利用FPGA對圖像進(jìn)行運(yùn)動目標(biāo)跟蹤算法處理,得到目標(biāo)的大小、位置、輪廓等信息,來驅(qū)動兩自由度伺服舵機(jī)云臺,使攝像頭對目標(biāo)進(jìn)行跟蹤,同時可實現(xiàn)VGA同步顯示
2016-05-10 15:36:09
基于雙DSP的運(yùn)動目標(biāo)智能跟蹤系統(tǒng)是怎樣設(shè)計并實現(xiàn)的?
2021-04-27 06:59:18
。為了更進(jìn)一步擴(kuò)大同一時間實時監(jiān)控范圍,本文介紹的傘降-目標(biāo)跟蹤系統(tǒng)通過同步控制器控制微秒級外部時鐘同步、子系統(tǒng)測試形變等手段,將多個單一的高速相機(jī)系統(tǒng)視場進(jìn)行視場拼接,從而將視場放大至單一系統(tǒng)的數(shù)倍,實現(xiàn)大視場
2016-04-07 15:14:38
空間運(yùn)動目標(biāo)進(jìn)行跟蹤并實時測量目標(biāo)的空間三維坐標(biāo)。 工作原理跟蹤站可以檢測目標(biāo)鏡在空間的運(yùn)動方向和大小并將這一信息發(fā)送給控制主機(jī),在控
2022-05-18 15:33:08
GTS激光跟蹤儀大尺寸三維掃描方案是基于球坐標(biāo)系的便攜式坐標(biāo)測量系統(tǒng),由 PC、控制主機(jī)、跟蹤站、目標(biāo)鏡等組成,集合了精密機(jī)械技術(shù)、計算機(jī)及控制技術(shù)、激光干涉測距技術(shù)、光電探測技術(shù)、現(xiàn)代數(shù)值計算理論
2022-06-30 15:01:05
本文介紹了齒輪傳動的多目標(biāo)設(shè)計方法,以斜齒輪體積和傳動平穩(wěn)可靠性為目標(biāo)函數(shù),建立了斜齒圓柱齒輪傳動的多目標(biāo)優(yōu)化設(shè)計數(shù)學(xué)模型。并且結(jié)合實例利用科學(xué)計算軟件MATLAB的
2009-04-07 10:59:50 26
26 提出一種新的單攝像機(jī)多目標(biāo)跟蹤方法,采用全局背景減法得到當(dāng)前幀所有運(yùn)動區(qū)域,利用kalman濾波器及局部背景減法得到已跟蹤目標(biāo)在當(dāng)前幀的預(yù)測區(qū)域,根據(jù)全局減法運(yùn)動區(qū)域
2009-04-15 08:58:0325 多目標(biāo)跟蹤是多傳感器數(shù)據(jù)融合中的一個重要問題。基于模式識別理論,提出了一種通過對傳感器測量數(shù)據(jù)集類,以區(qū)分源于不同目標(biāo)的測量數(shù)據(jù)集合。對各個類對應(yīng)的目標(biāo)狀態(tài)估計進(jìn)
2009-07-01 08:40:5418 本文描述了基于可變機(jī)器約束的多目標(biāo)柔性Job-shop調(diào)度問題模型,并應(yīng)用一種改進(jìn)的遺傳算法進(jìn)行求解。我們采用了表示工序先后順序及機(jī)器選擇的二維編碼方式,以多目標(biāo)優(yōu)化
2009-08-31 11:17:1813 該文分析了協(xié)方差矩陣的內(nèi)部結(jié)構(gòu),得到了一種具有較低運(yùn)算量的基于范數(shù)最小準(zhǔn)則的多目標(biāo)DOA 跟蹤算法。進(jìn)一步,在其基礎(chǔ)上通過解一組線性方程組得到了不同時間段各個目標(biāo)的
2009-11-24 15:44:1015 針對多物資多點出救多目標(biāo)應(yīng)急調(diào)度問題的特點,本文建立了一種以時間最短、成本最小為目標(biāo)的數(shù)學(xué)模型,應(yīng)用模糊理想點法作為多目標(biāo)模糊判決的求解算法,把多目標(biāo)決策問題
2010-01-15 16:03:258 本文討論了小波神經(jīng)網(wǎng)絡(luò)在機(jī)動多目標(biāo)跟蹤中的應(yīng)用,多目標(biāo)跟蹤就是主體為了維持對多個目標(biāo)(客體)當(dāng)前狀態(tài)的估計而對所接收的量測信息進(jìn)行處理的過程。以非線性大規(guī)模并
2010-01-22 14:05:0210 該文提出一種高機(jī)動多目標(biāo)的寬帶信號檢測方法。即先通過相鄰相關(guān)對回波信號進(jìn)行降階處理,然后對相關(guān)結(jié)果中自身項所在單元進(jìn)行模糊變換,并進(jìn)一步對其進(jìn)行Radon 變換實現(xiàn)目
2010-03-05 16:45:3321 無人機(jī)編隊視頻序列中的多目標(biāo)精確跟蹤::針對無人機(jī)編隊視頻序列中的多目標(biāo)精確跟蹤的要求,使用STK(satellitetoolkit)三維建模軟件模擬無人機(jī)UA
2010-03-18 16:21:4019 利用多傳感器跟蹤多目標(biāo)技術(shù)中最重要的問題是目標(biāo)關(guān)聯(lián)問題。它包括兩個方面: 同一傳感器2 次掃描或多次掃描間各目標(biāo)的關(guān)聯(lián)以及多傳感器各自的跟蹤航跡之間的關(guān)聯(lián)。在密集目標(biāo)、
2011-09-06 14:30:3731 在水下日標(biāo)檢測和跟蹤系統(tǒng)中,多目標(biāo)方位估計算法起著重要的作用.MUSIC算法是最具代表性的方法}為了滿足目標(biāo)方位估計對高速變時并行處理技術(shù)的要求,針對水下陣列信號處理的實
2011-10-12 16:19:5441 CAMSHIFT算法是一種基于顏色直方圖的目標(biāo)跟蹤算法。在視頻跟蹤過程中,CAMSHIFT算法利用選定目標(biāo)的顏色直方圖模型得到每幀圖像的顏色投影圖,并根據(jù)上一幀跟蹤的結(jié)果自適應(yīng)調(diào)整搜索
2011-11-07 14:47:55923 利用電腦USB接口資源,配套USB轉(zhuǎn)HPI接口的下載器與電腦軟件,使一臺電腦對多塊DSP目標(biāo)板依次進(jìn)行HPI Bootloader,最終實現(xiàn)全部DSP目標(biāo)板脫機(jī)運(yùn)行程序。DSP多目標(biāo)板程序下載方案適用于DSP多目
2011-11-11 14:31:0145 文中提出了一種適用于多傳感器多目標(biāo)跟蹤的JPDA算法,它以極大似然估計完成對來自多傳感器的測量集合進(jìn)行同源最優(yōu)分劃,然后采用JPDA方法對多目標(biāo)進(jìn)行跟蹤。經(jīng)過理論分析和仿真
2012-02-03 10:38:1747 系統(tǒng)采用Camshift算法,將人手圖像由RGB空間轉(zhuǎn)換到HSV空間后,在HSV空間利用半自動預(yù)定義模板顏色對人手進(jìn)行分割,并對其進(jìn)行改進(jìn)實現(xiàn)多目標(biāo)跟蹤,由于Camshift算法為半自動算法,在對手勢進(jìn)
2012-03-01 15:46:1071 現(xiàn)代儀器的質(zhì)量指標(biāo)與儀器的主要結(jié)構(gòu)參數(shù)之間有一定的制約關(guān)系。要使總目標(biāo)好,實際上就是一個多目標(biāo)優(yōu)化問題。但是目前還沒有見到對所有質(zhì)量指標(biāo)進(jìn)行優(yōu)化設(shè)計的例子,目前己
2012-06-01 16:12:071058 針對傳感器網(wǎng)絡(luò)下多目標(biāo)跟蹤時目標(biāo)數(shù)量不斷變化這一復(fù)雜情況,文中對多目標(biāo)的跟蹤和特征管理方法進(jìn)行了研究。該方法由數(shù)據(jù)關(guān)聯(lián)、多目標(biāo)跟蹤、特征管理,和信息融合所組成。其
2012-06-07 09:09:490 基于CMGA的SoC測試多目標(biāo)優(yōu)化研究_談恩民
2017-01-07 18:39:171 基于演化硬件的多目標(biāo)進(jìn)化算法的研究
2017-01-08 14:47:530 開關(guān)磁阻電機(jī)多目標(biāo)協(xié)同優(yōu)化設(shè)計_宋受俊
2017-01-08 11:28:380 紅外動目標(biāo)識別跟蹤系統(tǒng)的實現(xiàn)方案
2017-01-12 22:13:3424 安全儀表系統(tǒng)設(shè)計的多目標(biāo)優(yōu)化_左信
2017-01-18 20:21:170 目標(biāo)跟蹤,本文將首先向大家介紹常用的粒子濾波視頻目標(biāo)跟蹤算法,對其原理進(jìn)行簡單的分析,為后續(xù)進(jìn)一步選擇和應(yīng)用算法實現(xiàn)目標(biāo)跟蹤提供基礎(chǔ)。
2017-02-27 10:32:475145 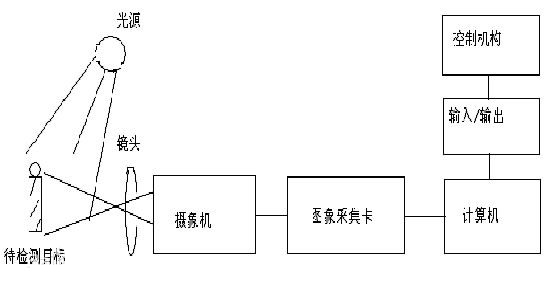
基于BF561的目標(biāo)跟蹤模塊的設(shè)計與實現(xiàn)_王曉衛(wèi)
2017-03-19 11:33:111 分塊多特征自適應(yīng)融合的多目標(biāo)視覺跟蹤_施瀅
2017-03-19 19:04:231 與跟蹤系統(tǒng),可以實現(xiàn)目標(biāo)檢測跟蹤系統(tǒng)的小型化,智能化,并以具體飛行目標(biāo)為例進(jìn)行了目標(biāo)的識別和跟蹤。 研究目的 隨著現(xiàn)代社會對軍用和民用設(shè)備需求的不斷擴(kuò)大及要求的不斷提高,運(yùn)動目標(biāo)的識別和跟蹤技術(shù)已經(jīng)迅速發(fā)展成為現(xiàn)代信
2017-10-16 16:59:314 基于DSP實現(xiàn)艦船目標(biāo)檢測與跟蹤
2017-10-19 14:24:4413 目標(biāo)跟蹤是計算機(jī)視覺領(lǐng)域的一個基本問題,其主要應(yīng)用于視頻監(jiān)控,人機(jī)交與機(jī)器人視覺感知等場景。目標(biāo)跟蹤可分為短時間目標(biāo)跟蹤與長時間目標(biāo)跟蹤,單目標(biāo)跟蹤與多目標(biāo)跟蹤。文中要研究最普遍的短時間單目標(biāo)跟蹤
2017-10-28 11:05:551 為了實現(xiàn)復(fù)雜環(huán)境下移動機(jī)器人目標(biāo)跟蹤,提出多特征分塊匹配的跟蹤算法。該算法對目標(biāo)區(qū)域進(jìn)行分塊,利用顏色、深度特征對各塊圖像進(jìn)行特征匹配,實現(xiàn)目標(biāo)的精確定位。在跟蹤過程中,根據(jù)塊圖像中顏色和深度的相似
2017-11-07 17:29:2614 利用FPGA及其片上32位微處理器內(nèi)核MicroBlaze,構(gòu)建雷達(dá)目標(biāo)跟蹤系統(tǒng),硬件實現(xiàn)的高速并行性保證了多目標(biāo)跟蹤的實時性,微處理器CPU強(qiáng)大的控制協(xié)調(diào)功能保證系統(tǒng)的正常運(yùn)行。針對多目標(biāo)波門排序這一難點,本文提出了利用頂層軟件排序的方法,降低了難度和運(yùn)算量,提高了靈活性,很好的解決了問題。
2017-11-24 20:46:461735 
在面向?qū)ο筌浖O(shè)計與實現(xiàn)過程中,類職責(zé)分配是其中最重要且復(fù)雜的步驟之一,它在很大程度上影響軟件質(zhì)量。為了實現(xiàn)類職責(zé)自動分配的目標(biāo),從軟件內(nèi)聚與耦合度量的角度出發(fā),建立了類職責(zé)分配問題多目標(biāo)優(yōu)化模型
2017-11-28 17:35:250 針對單目視覺對多個相似的目標(biāo)跟蹤因遮擋等因素影響而失效的問題,提出一種基于改進(jìn)霍夫森林框架的多目標(biāo)跟蹤算法。在將多目標(biāo)跟蹤問題歸結(jié)為基于目標(biāo)檢測的軌跡關(guān)聯(lián)過程基礎(chǔ)上,通過引入在線學(xué)習(xí)霍夫森林框架
2017-12-14 17:09:390 數(shù)據(jù)進(jìn)行算例仿真,驗證了模型的有效性,比較了單目標(biāo)優(yōu)化和多目標(biāo)優(yōu)化對微電網(wǎng)優(yōu)化運(yùn)行的影響。利用非線性規(guī)劃工具進(jìn)行求解,獲得全局最優(yōu)解。算例結(jié)果表明,計及可中斷負(fù)荷的考慮特定時段聯(lián)絡(luò)線削峰填谷微電網(wǎng)多目標(biāo)優(yōu)
2017-12-26 11:47:130 多目標(biāo)優(yōu)化問題是需要同時處理多個相互沖突和相互影響的目標(biāo),一個子目標(biāo)的改善有可能會引起另一個或者另幾個子目標(biāo)的性能降低,需要在他們中間進(jìn)行協(xié)調(diào)處理。起初,多目標(biāo)優(yōu)化問題往往通過加權(quán)等方式轉(zhuǎn)化為單目標(biāo)
2018-01-13 09:48:430 針對現(xiàn)有制定的解編方案無法有效地滿足鐵路技術(shù)站階段計劃配流工作,基于牽引質(zhì)量和換長的不同硬時間窗滿軸約束,并綜合考慮車流接續(xù)和編組去向約束,以總車流量、滿軸出發(fā)列車最多為目標(biāo),建立了技術(shù)站多目標(biāo)動態(tài)
2018-01-16 14:16:230 在微電網(wǎng)調(diào)度過程中綜合考慮經(jīng)濟(jì)、環(huán)境、蓄電池的循環(huán)電量,建立多目標(biāo)優(yōu)化數(shù)學(xué)模型。針對傳統(tǒng)多目標(biāo)粒子群算法(multi-objective particle swarm optimization
2018-01-30 18:07:2011 針對高斯混合概率假設(shè)密度( GM-PHD)濾波器未檢查一對一假設(shè)以及難以跟蹤跨越目標(biāo)的問題,在其基礎(chǔ)上提出一種約束權(quán)重的改進(jìn)多目標(biāo)跟蹤方法。通過構(gòu)建權(quán)重矩陣,從所有生成的目標(biāo)中尋找權(quán)重最大的目標(biāo)
2018-02-24 13:55:360 在多目標(biāo)跟蹤過程中,遮擋和漏檢容易引起目標(biāo)標(biāo)簽錯亂和丟失,造成跟蹤失敗。針對該問題,提出一種基于混合高斯一概率假設(shè)密度( GM-PHD)濾波器的改進(jìn)跟蹤方法。使用背景差分檢測獲得二值圖像映射和測量
2018-03-07 14:32:473 問題。通過對選定的多個低階固有頻率目標(biāo)函數(shù)采用加權(quán)求平均頻率的方法實現(xiàn)了承壓板結(jié)構(gòu)的動態(tài)特性優(yōu)化;采用加權(quán)平均的方法確定了剛度和頻率的綜合目標(biāo)函數(shù),實現(xiàn)了承壓板結(jié)構(gòu)的多目標(biāo)拓?fù)鋬?yōu)化,最終設(shè)計出了一種新的承壓板結(jié)構(gòu)。研
2018-03-15 13:33:540 多目標(biāo)跟蹤技術(shù)通過對不同目標(biāo)之間的相互社會關(guān)系進(jìn)行建模,改善單個目標(biāo)的跟蹤性能,并且快速檢測和預(yù)判場景中可能發(fā)生的群體類突發(fā)事件。現(xiàn)有的多目標(biāo)跟蹤技術(shù)雖在數(shù)據(jù)關(guān)聯(lián)和軌跡估計上取得平衡,但依然存在諸多
2018-12-21 15:03:371 上期疑問,以及新建工程多目標(biāo)
2020-03-12 14:12:452138 
近日,大華股份基于深度學(xué)習(xí)的視覺目標(biāo)跟蹤算法,在通用目標(biāo)跟蹤評測集GOT-10k(Generic Object Tracking Benchmark)上獲得綜合精度排行榜第一,超越了其它一流AI
2020-06-11 14:24:513380 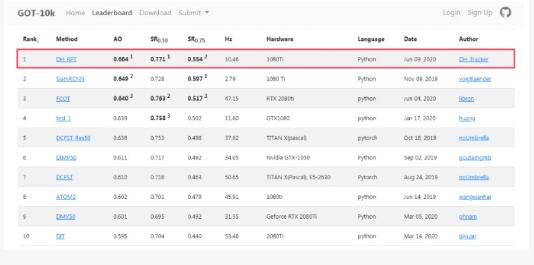
導(dǎo)讀 本文是一篇多目標(biāo)跟蹤方向的調(diào)研報告,從相關(guān)方向、核心步驟、評價指標(biāo)和最新進(jìn)展等維度出發(fā),對MOT進(jìn)行了全面的介紹,不僅適合作為入門科普,而且能夠幫助大家加深理解。 最近做了一些多目標(biāo)跟蹤方向
2020-11-05 10:01:553258 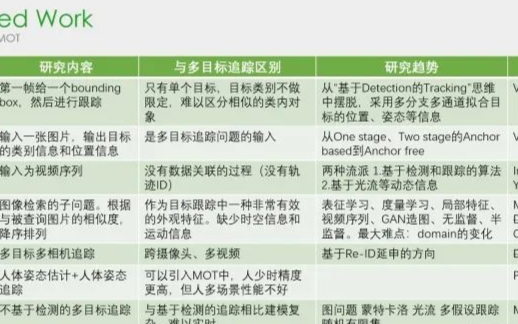
對象跟蹤問題一直是計算機(jī)視覺的熱點任務(wù)之一,簡單的可以分為單目標(biāo)跟蹤與多目標(biāo)跟蹤,最常見的目標(biāo)跟蹤算法都是基于檢測的跟蹤算法,...
2020-12-08 23:31:30802 對監(jiān)控領(lǐng)域的目標(biāo)跟蹤方法以及面臨的挑戰(zhàn)進(jìn)行了一個介紹,是一個很好的了解目標(biāo)跟蹤領(lǐng)域的“是什么”和“為什么”問題的文章。
2020-12-14 23:04:54366 對抗機(jī)器學(xué)習(xí)的最新研究開始關(guān)注自主駕駛中的視覺感知,并研究了目標(biāo)檢測模型的對抗示例。然而在視覺感知管道中,在被稱為多目標(biāo)跟蹤的過程中,檢測到的目標(biāo)必須被跟蹤,以建立周圍障礙物的移動軌跡。由于多目標(biāo)
2021-02-01 11:01:462757 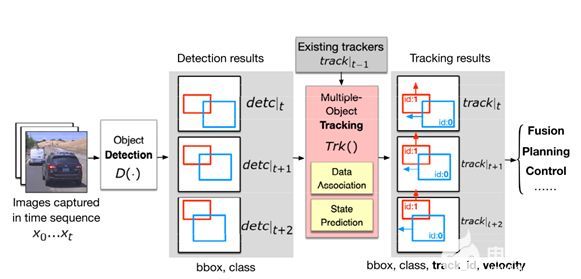
?AiP助力實現(xiàn)新突破 ? 2019年加特蘭推出了基于60GHz/77GHz毫米波雷達(dá)芯片的室內(nèi)人員檢測解決方案,用于室內(nèi)人員的精準(zhǔn)定位和穩(wěn)定跟蹤。同時,結(jié)合加特蘭針對生命體征探測功能的方案,可實現(xiàn)
2021-03-05 11:53:033860 VNE-MOPSO算法。針對該問題,提出一種多目標(biāo)虛擬網(wǎng)絡(luò)映射 VNE-MOPSO算法。通過引入 Pareto熵多目標(biāo)優(yōu)化模型,計算兩次迭代過程的差熵,評估群體進(jìn)化情況并將其作為反饋信息設(shè)計動態(tài)自適應(yīng)的粒子參數(shù)策略,以達(dá)到近似最優(yōu)多目標(biāo)優(yōu)化映射方案
2021-04-01 10:45:2816 針對多伯努利濾波方法在多目標(biāo)跟蹤時,難以檢測新生目標(biāo),且當(dāng)目標(biāo)岀現(xiàn)互相遮擋等千擾時,跟蹤精度下降,甚至岀現(xiàn)目標(biāo)漏跟,以及當(dāng)漏跟目標(biāo)被重新跟蹤后,與之前運(yùn)動軌跡難以關(guān)聯(lián)等問題,在多伯努利濾波框架
2021-04-07 14:27:345 為提高攝像機(jī)目標(biāo)跟蹤精度,提岀基于多假設(shè)跟蹤(MH)框架的采用軌跡樹層次關(guān)系模型多攝像機(jī)多目標(biāo)跟蹤方法。首先,通過多個攝像機(jī)產(chǎn)生的軌跡之間的時空關(guān)聯(lián),找岀未知數(shù)目的多個軌跡,并通過求解各幀的最大
2021-04-12 16:05:0738 和多目標(biāo)跟蹤,其中單目標(biāo)跟蹤相對簡單,除了需要解決與多目標(biāo)跟蹤共性的問題(如遮擋、形變等)外,單目標(biāo)跟蹤不需要考慮目標(biāo)的數(shù)據(jù)關(guān)聯(lián)問題。然而,在多目標(biāo)跟蹤系統(tǒng)中,場景更為復(fù)雜,跟蹤目標(biāo)的數(shù)量和類別往往是不確定的
2021-05-08 16:27:422 目標(biāo)漏跟。針對該問題,在多伯努利濾波框架下,深度分析目標(biāo)的特征信息,引λ抗干擾的卷積特征,提出基于卷積特征的多伯努利視頻多目標(biāo)跟蹤算法,并在目標(biāo)狀態(tài)提取過程中,進(jìn)一步提岀模板更新,使用自適應(yīng)學(xué)習(xí)速率進(jìn)行更新
2021-05-12 15:18:1111 多目標(biāo)優(yōu)化算法在復(fù)雜網(wǎng)絡(luò)社區(qū)發(fā)現(xiàn)中具有很強(qiáng)的競爭力,然而,在處理社區(qū)結(jié)構(gòu)較為模糊、網(wǎng)絡(luò)數(shù)據(jù)規(guī)模大的問題時難以得到滿意的效果。為克服現(xiàn)有多目標(biāo)方法的不足,提岀一種基于譜聚類的多目標(biāo)復(fù)雜網(wǎng)絡(luò)社區(qū)發(fā)現(xiàn)算法
2021-06-17 15:02:3511 視頻目標(biāo)跟蹤要求在已知第一幀感興趣物體的位置和尺度信息的情況下,對該目標(biāo)在后續(xù)視頻幀中進(jìn)行持續(xù)的定位和尺度估計W。廣義的目標(biāo)跟蹤通常包含單目標(biāo)跟蹤和多目標(biāo)跟蹤。
2022-07-05 11:24:331095 對象跟蹤問題一直是計算機(jī)視覺的熱點任務(wù)之一,簡單的可以分為單目標(biāo)跟蹤與多目標(biāo)跟蹤,最常見的目標(biāo)跟蹤算法都是基于檢測的跟蹤算法,首先發(fā)現(xiàn)然后標(biāo)記,好的跟蹤算法必須具備REID的能力。今天小編斗膽給大家推薦一個結(jié)合傳統(tǒng)算法跟深度學(xué)習(xí),特別好用的對象跟蹤算法框架DeepSort
2022-09-14 16:20:052190 目標(biāo)跟蹤是計算機(jī)視覺中非常重要的任務(wù)之一。它剛好在目標(biāo)檢測之后出現(xiàn)。為了完成目標(biāo)跟蹤任務(wù),首先需要將目標(biāo)定位在一幀中。
2022-10-12 09:40:06962 針對深度學(xué)習(xí)算法在多目標(biāo)跟蹤中的實時性問題, 提出一種基于MobileNet的多目標(biāo)跟蹤算法. 借助于MobileNet深度可分離卷積能夠?qū)ι疃染W(wǎng)絡(luò)模型進(jìn)行壓縮的原理, 將YOLOv3主干網(wǎng)絡(luò)替換
2022-11-09 10:23:30736 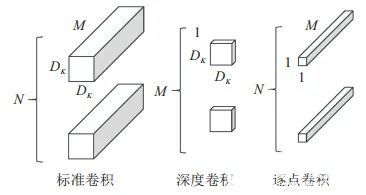
多目標(biāo)跟蹤(MOT)任務(wù)的關(guān)鍵挑戰(zhàn)是跟蹤目標(biāo)下的時間建模。現(xiàn)存的用檢測跟蹤的方法采用簡單的heuristics,如空間或外觀相似性。
2023-04-18 09:12:55652 在開始介紹 DeepSORT 的原理之前呢,我們先來了解下目標(biāo)檢測,和目標(biāo)跟蹤之間的區(qū)別
2023-04-23 09:43:091359 
在開始介紹DeepSORT的原理之前呢,我們先來了解下目標(biāo)檢測,和目標(biāo)跟蹤之間的區(qū)別。
2023-06-10 16:08:201596 
最近做了一些多目標(biāo)跟蹤方向的調(diào)研,因此把調(diào)研的結(jié)果以圖片加文字的形式展現(xiàn)出來,希望能幫助到入門這一領(lǐng)域的同學(xué)。也歡迎大家和我討論關(guān)于這一領(lǐng)域的任何問題。
2023-06-13 09:37:52389 
TBD(Tracking-by-Detection)與DFT(Detection-Free Tracking)也即基于檢測的多目標(biāo)跟蹤與基于目標(biāo)外形的先驗知識無需檢測器的多目標(biāo)跟蹤。TBD是目前學(xué)界業(yè)界研究的主流。
2023-06-15 17:22:40868 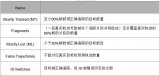
3.2.3目標(biāo)跟蹤圖3-6所示為目標(biāo)跟蹤示意圖。目標(biāo)跟蹤,是指在特定場景跟蹤某一個或多個特定感興趣對象的過程。傳統(tǒng)的應(yīng)用就是視頻和真實世界的交互,在檢測到初始對象之后進(jìn)行觀察。現(xiàn)在,目標(biāo)跟蹤在計算機(jī)
2022-03-07 09:50:36306 
都是雙目或者三目設(shè)備,同時具備可見光、激光、熱成像等,支持聯(lián)動可見光設(shè)備對目標(biāo)進(jìn)行跟蹤和圖像放大,對視頻圖像信息進(jìn)行采集取證,實現(xiàn)發(fā)現(xiàn)即可視,有助于給決策指揮人員提供有力的參考信息。 屏蔽區(qū)設(shè)置: 海防視頻監(jiān)控
2023-06-26 15:02:34380 
3D點云目標(biāo)跟蹤的評價指標(biāo),可以根據(jù)跟蹤的目標(biāo)是單個還是多個,分為單目標(biāo)跟蹤(SOT)和多目標(biāo)跟蹤(MOT)兩種。一般來說,SOT的評價指標(biāo)主要關(guān)注跟蹤的準(zhǔn)確性和魯棒性,而MOT的評價指標(biāo)則需要考慮跟蹤的完整性和一致性。
2023-08-02 12:38:04630 本文綜述了基于隨機(jī)有限集方法的多傳感器多目標(biāo)跟蹤的最新研究進(jìn)展。在多傳感器濾波中起基礎(chǔ)性作用的融合方法可分為數(shù)據(jù)層多目標(biāo)測量融合和評估層多目標(biāo)密度融合,分別共享融合傳感器之間的局部測量值與后驗密度。
2023-12-04 10:39:46158 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論