MIPI(移動(dòng)行業(yè)處理器接口)是Mobile Industry Processor Interface的縮寫(xiě)。MIPI(移動(dòng)行業(yè)處理器接口)是MIPI聯(lián)盟發(fā)起的為移動(dòng)應(yīng)用處理器制定的開(kāi)放標(biāo)準(zhǔn)。
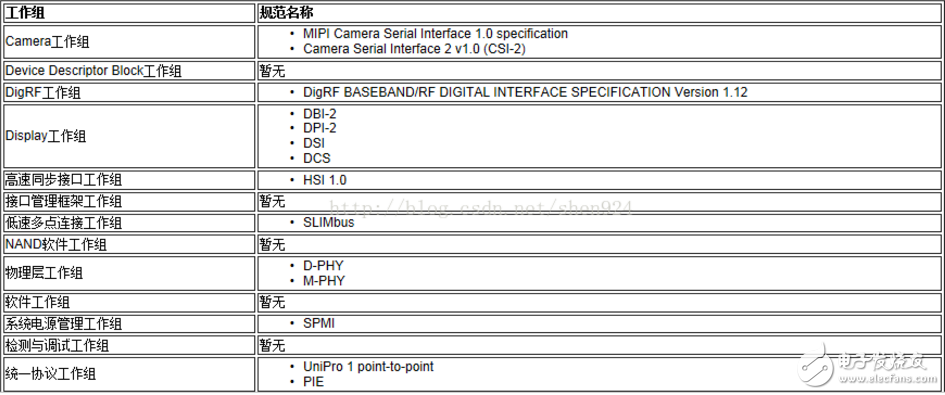
已經(jīng)完成和正在計(jì)劃中的規(guī)范如下:
D-PHY介紹
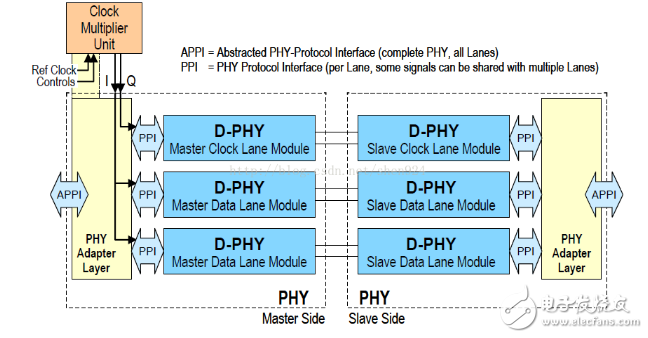
1、 D-PHY 描述了一同步、高速、低功耗、低代價(jià)的PHY。
? 一個(gè) PHY配置包括
? 一個(gè)時(shí)鐘lane
? 一個(gè)或多個(gè)數(shù)據(jù)lane
? 兩個(gè)Lane的 PHY配置如下圖
三個(gè)主要的lane的類(lèi)型
? 單向時(shí)鐘Lane
? 單向數(shù)據(jù)Lane
? 雙向數(shù)據(jù)Lane
? D-PHY的傳輸模式
? 低功耗(Low-Power)信號(hào)模式(用于控制):10MHz (max)
? 高速(High-Speed)信號(hào)模式(用于高速數(shù)據(jù)傳輸):80Mbps ~ 1Gbps/Lane
? D-PHY低層協(xié)議規(guī)定最小數(shù)據(jù)單位是一個(gè)字節(jié)
? 發(fā)送數(shù)據(jù)時(shí)必須低位在前,高位在后。
? D-PHY適用于移動(dòng)應(yīng)用
? DSI:顯示串行接口
? 一個(gè)時(shí)鐘lane,一個(gè)或多個(gè)數(shù)據(jù)lane
? CSI:攝像串行接口
2、Lane模塊
? PHY由D-PHY(Lane模塊)組成
? D-PHY可能包含:
? 低功耗發(fā)送器(LP-TX)
? 低功耗接收器(LP-RX)
? 高速發(fā)送器(HS-TX)
? 高速接收器(HS-RX)
? 低功耗競(jìng)爭(zhēng)檢測(cè)器(LP-CD)
? 三個(gè)主要lane類(lèi)型
? 單向時(shí)鐘Lane
? Master:HS-TX, LP-TX
? Slave:HS-RX, LP-RX
? 單向數(shù)據(jù)Lane
? Master:HS-TX, LP-TX
? Slave:HS-RX, LP-RX
? 雙向數(shù)據(jù)Lane
? Master, Slave:HS-TX, LP-TX, HS-RX, LP-RX, LP-CD
3、Lane狀態(tài)和電壓
? Lane狀態(tài)
? LP-00, LP-01, LP-10, LP-11 (單端)
? HS-0, HS-1 (差分)
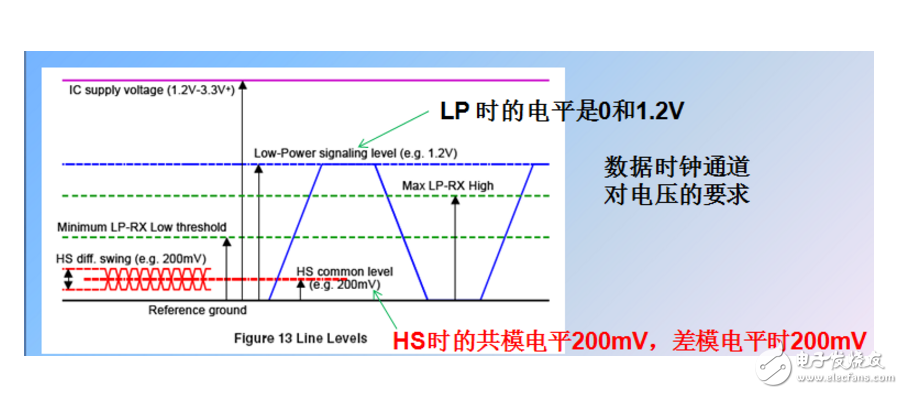
? Lane電壓(典型)
? LP:0-1.2V
? HS:100-300mV (200mV)
4、操作模式
? 數(shù)據(jù)Lane的三種操作模式
? Escape mode, High-Speed(Burst) mode, Control mode
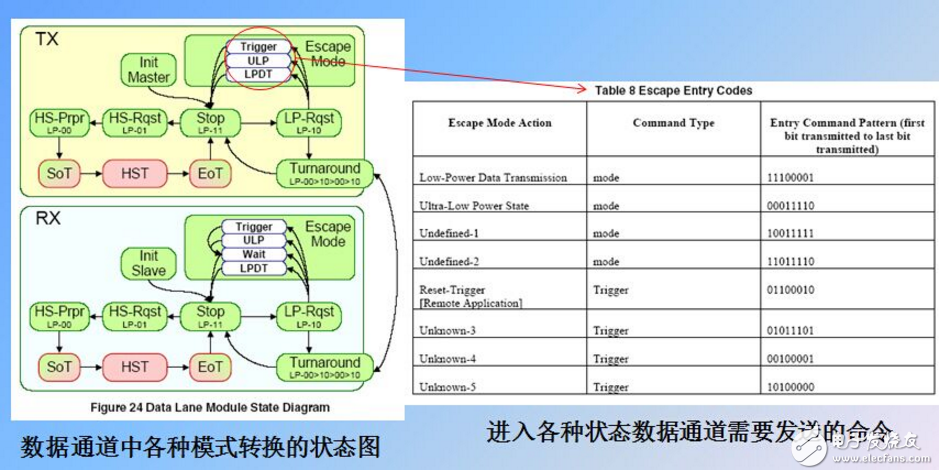
?從控制模式的停止?fàn)顟B(tài)開(kāi)始的可能事件有:
? Escape mode request (LP-11→LP-10→LP-00→LP-01→LP-00)
? High-Speed mode request (LP-11→LP-01→LP-00)
? Turnaround request (LP-11→LP-10→LP-00→LP-10→LP-00)
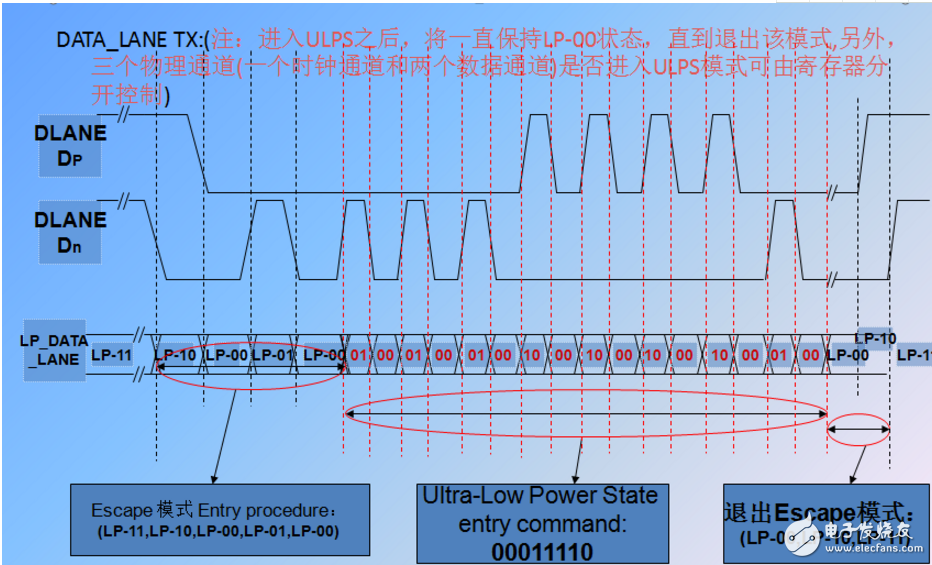
? Escape mode是數(shù)據(jù)Lane在LP狀態(tài)下的一種特殊操作
?在這種模式下,可以進(jìn)入一些額外的功能:LPDT, ULPS, Trigger
?數(shù)據(jù)Lane進(jìn)入Escape mode模式通過(guò)LP-11→LP-10→LP-00→LP-01→LP-00
?一旦進(jìn)入Escape mode模式,發(fā)送端必須發(fā)送1個(gè)8-bit的命令來(lái)響應(yīng)請(qǐng)求的動(dòng)作
? Escape mode 使用Spaced-One-Hot Encoding
?超低功耗狀態(tài)(Ultra-Low Power State)
?這個(gè)狀態(tài)下,lines處于空狀態(tài) (LP-00)
? 時(shí)鐘Lane的超低功耗狀態(tài)
?時(shí)鐘Lane通過(guò)LP-11→LP-10→LP-00進(jìn)入U(xiǎn)LPS狀態(tài)
?通過(guò)LP-10 → TWAKEUP →LP-11退出這種狀態(tài),最小TWAKEUP時(shí)間為1ms
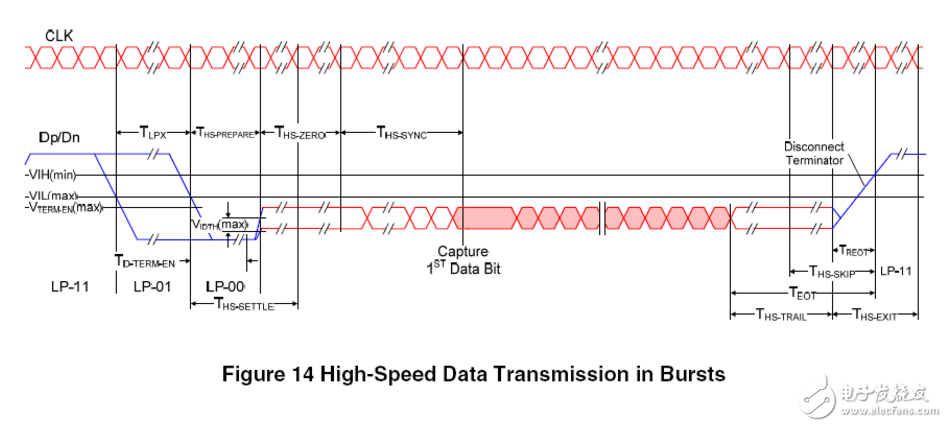
? 高速數(shù)據(jù)傳輸
?發(fā)送高速串行數(shù)據(jù)的行為稱(chēng)為高速數(shù)據(jù)傳輸或觸發(fā)(burst)
?全部Lanes門(mén)同步開(kāi)始,結(jié)束的時(shí)間可能不同。
?時(shí)鐘應(yīng)該處于高速模式
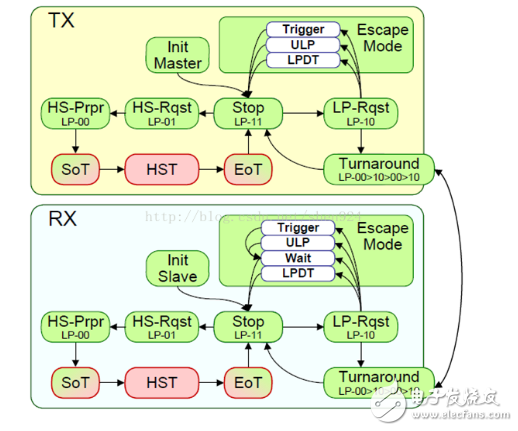
? 各模操作式下的傳輸過(guò)程
?進(jìn)入Escape模式的過(guò)程 :LP-11→LP-10→LP-00→LP-01→LP-00→Entry Code → LPD (10MHz)
?退出Escape模式的過(guò)程:LP-10→LP-11
?進(jìn)入高速模式的過(guò)程:LP-11→LP-01→LP-00→SoT(00011101) → HSD (80Mbps ~ 1Gbps)
?退出高速模式的過(guò)程:EoT→LP-11
?控制模式 - BTA 傳輸過(guò)程:LP-11→LP-10→LP-00→LP-10→LP-00
?控制模式 - BTA 接收過(guò)程:LP-00→LP-10→LP-11
? 狀態(tài)轉(zhuǎn)換關(guān)系圖
差分信號(hào),什么是差分信號(hào)
一個(gè)差分信號(hào)是用一個(gè)數(shù)值來(lái)表示兩個(gè)物理量之間的差異。從嚴(yán)格意義上來(lái)講,所有電壓信號(hào)都是差分的,因?yàn)橐粋€(gè)電壓只能是相對(duì)于另一個(gè)電壓而言的。在某些系統(tǒng)里,系統(tǒng)’地’被用作電壓基準(zhǔn)點(diǎn)。當(dāng)’地’當(dāng)作電壓測(cè)量基準(zhǔn)時(shí),這種信號(hào)規(guī)劃被稱(chēng)之為單端的。我們使用該術(shù)語(yǔ)是因?yàn)樾盘?hào)是用單個(gè)導(dǎo)體上的電壓來(lái)表示的。
另一方面,一個(gè)差分信號(hào)作用在兩個(gè)導(dǎo)體上。信號(hào)值是兩個(gè)導(dǎo)體間的電壓差。盡管不是非常必要,這兩個(gè)電壓的平均值還是會(huì)經(jīng)常保持一致。我們用一個(gè)方法對(duì)差分信號(hào)做一下比喻,差分信號(hào)就好比是蹺蹺板上的兩個(gè)人,當(dāng)一個(gè)人被蹺上去的時(shí)候,另一個(gè)人被蹺下來(lái)了 - 但是他們的平均位置是不變的。繼續(xù)蹺蹺板的類(lèi)推,正值可以表示左邊的人比右邊的人高,而負(fù)值表示右邊的人比左邊的人高。0 表示兩個(gè)人都是同一水平。
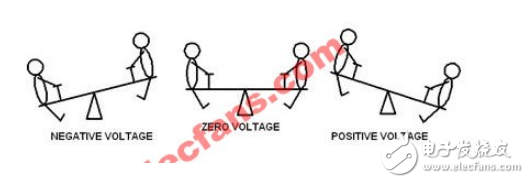
應(yīng)用到電學(xué)上,這兩個(gè)蹺蹺板用一對(duì)標(biāo)識(shí)為V+和V-的導(dǎo)線(xiàn)來(lái)表示。當(dāng)V+》V-時(shí),信號(hào)定義成正極信號(hào),V+ 《 V-時(shí),信號(hào)定義成負(fù)極信號(hào)。
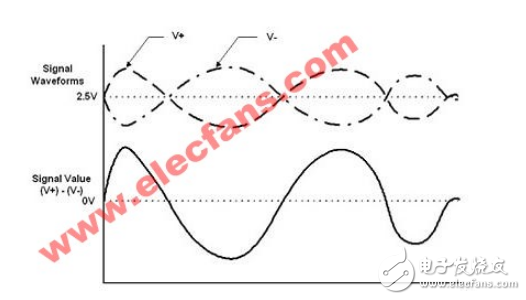
上圖 差分對(duì)圍繞擺動(dòng)的平均電壓設(shè)置成 2.5V。當(dāng)該對(duì)的每個(gè)信號(hào)都限制成 0-5V 振幅時(shí),偏移該差分對(duì)會(huì)提供一個(gè)信號(hào)擺動(dòng)的最大范圍。當(dāng)用單一 5V 電源操作時(shí),經(jīng)常就會(huì)出現(xiàn)這種情況。
當(dāng)不采用單端信號(hào)而采取差分信號(hào)方案時(shí),我們用一對(duì)導(dǎo)線(xiàn)來(lái)替代單根導(dǎo)線(xiàn),增加了任何相關(guān)接口電路的復(fù)雜性。那幺差分信號(hào)提供了什幺樣的有形益處,才能證明復(fù)雜性和成本的增加是值得的呢?
差分信號(hào)的第一個(gè)好處是,因?yàn)槟阍诳刂啤鶞?zhǔn)’電壓,所以能夠很容易地識(shí)別小信號(hào)。在一個(gè)地做基準(zhǔn),單端信號(hào)方案的系統(tǒng)里,測(cè)量信號(hào)的精確值依賴(lài)系統(tǒng)內(nèi)’地’的一致性。信號(hào)源和信號(hào)接收器距離越遠(yuǎn),他們局部地的電壓值之間有差異的可能性就越大。從差分信號(hào)恢復(fù)的信號(hào)值在很大程度上與’地’的精確值無(wú)關(guān),而在某一范圍內(nèi)。
差分信號(hào)的第二個(gè)主要好處是,它對(duì)外部電磁干擾(EMI)是高度免疫的。一個(gè)干擾源幾乎相同程度地影響差分信號(hào)對(duì)的每一端。既然電壓差異決定信號(hào)值,這樣將忽視在兩個(gè)導(dǎo)體上出現(xiàn)的任何同樣干擾。除了對(duì)干擾不大靈敏外,差分信號(hào)比單端信號(hào)生成的 EMI 還要少。
差分信號(hào)提供的第三個(gè)好處是,在一個(gè)單電源系統(tǒng),能夠從容精確地處理’雙極’信號(hào)。為了處理單端,單電源系統(tǒng)的雙極信號(hào),我們必須在地和電源干線(xiàn)之間某任意電壓處(通常是中點(diǎn))建立一個(gè)虛地。用高于虛地的電壓來(lái)表示正極信號(hào),低于虛地的電壓來(lái)表示負(fù)極信號(hào)。接下來(lái),必須把虛地正確地分布到整個(gè)系統(tǒng)里。而對(duì)于差分信號(hào),不需要這樣一個(gè)虛地,這就使我們處理和傳播雙極信號(hào)有一個(gè)高逼真度,而無(wú)須依賴(lài)虛地的穩(wěn)定性。
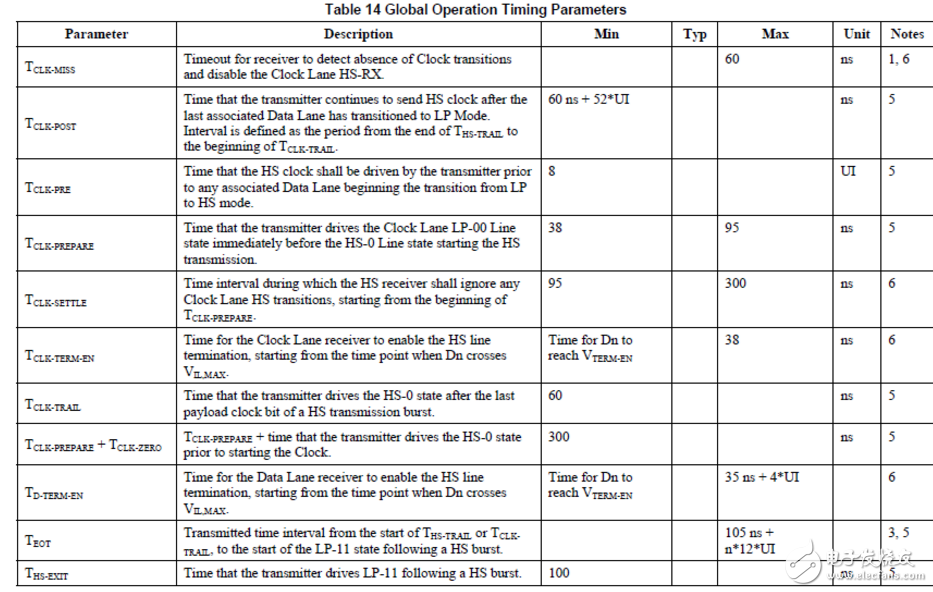
完成mipi信號(hào)通道分配后,需要生成與物理層對(duì)接的時(shí)序、同步信號(hào):
MIPI規(guī)定,傳輸過(guò)程中,包內(nèi)是200mV、包間以及包啟動(dòng)和包結(jié)束時(shí)是1.2V,兩種不同的電壓擺幅,需要兩組不同的LVDS驅(qū)動(dòng)電路在輪流切換工作;為了傳輸過(guò)程中各數(shù)據(jù)包之間的安全可靠過(guò)渡,從啟動(dòng)到數(shù)據(jù)開(kāi)始傳輸,MIPI定義了比較長(zhǎng)的可靠過(guò)渡時(shí)間,加起來(lái)最少也有600多ns;而且規(guī)定各個(gè)時(shí)間參數(shù)是可調(diào)的,所以需要一定等待時(shí)間,需要緩存,我們用寄存器代替FIFO,每通道128Byte。
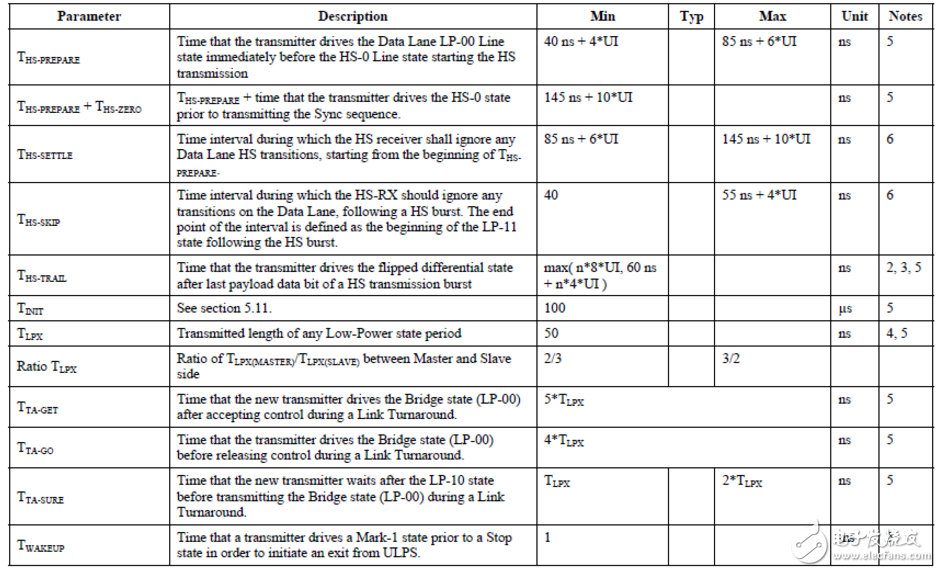
串行時(shí)鐘與數(shù)據(jù)差分傳輸?shù)倪^(guò)渡時(shí)間關(guān)系如下:
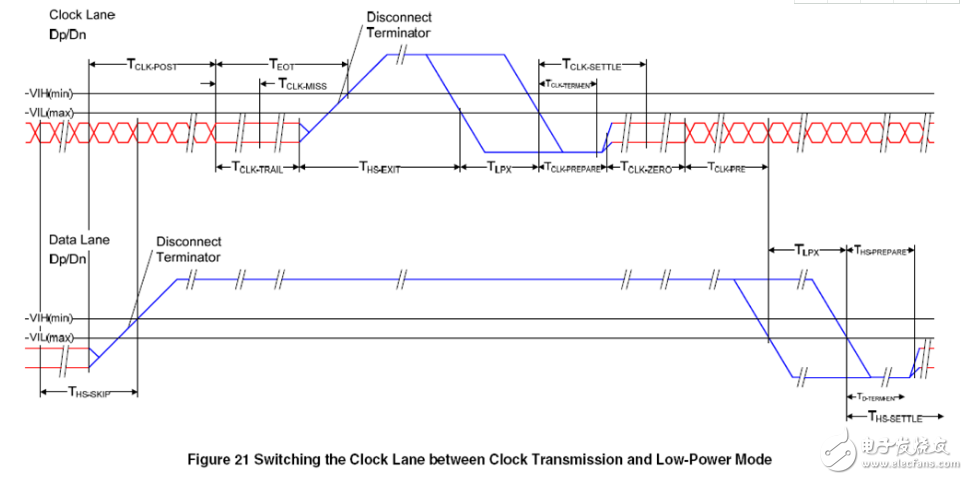
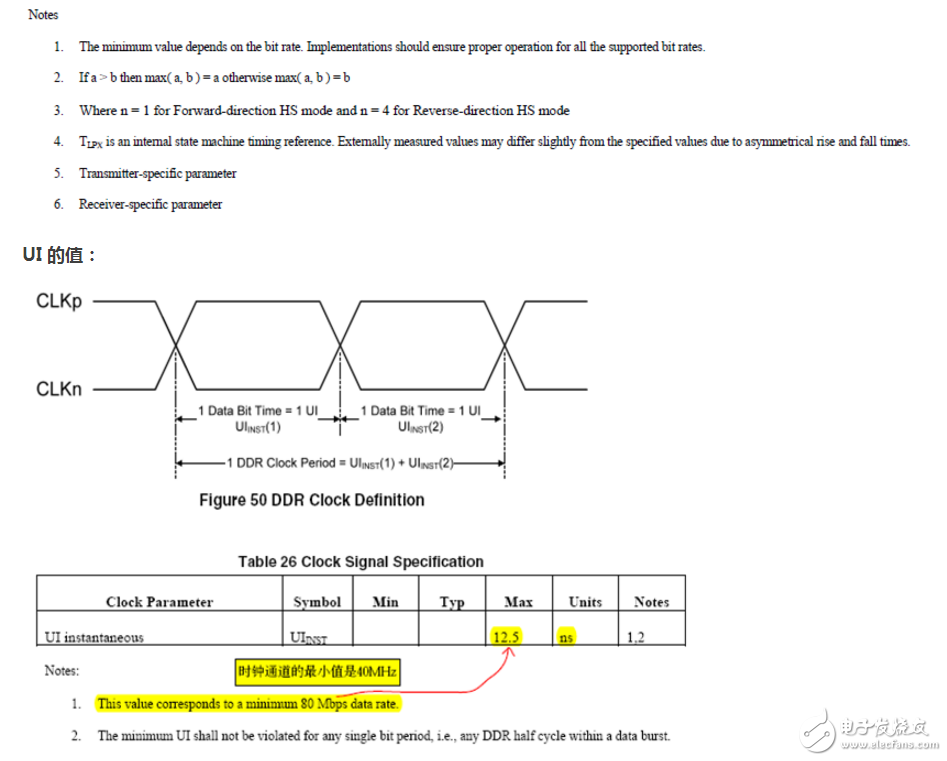
各個(gè)時(shí)間參數(shù)需要滿(mǎn)足以下的要求:
數(shù)據(jù)與時(shí)鐘的相位關(guān)系:
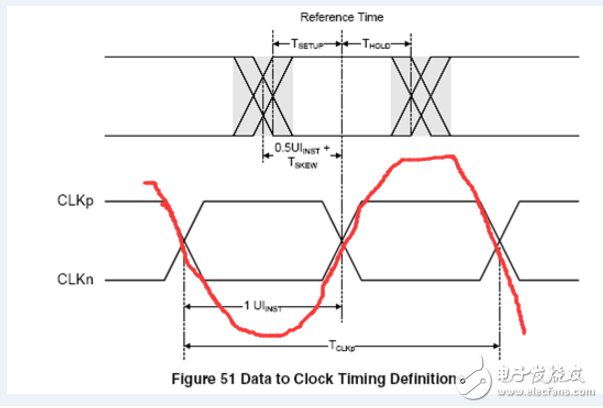
根據(jù)前面:mipi差分信號(hào)原理 介紹。
CLKp是高電平,CLKn是低電平的時(shí)候,差分信號(hào)表現(xiàn)為高電平。
CLKn是高電平, CLKp是低電平的時(shí)候,差分信號(hào)表現(xiàn)為低電平。
所以結(jié)果就可以等效成紅線(xiàn)描述的正弦。
從正弦可以看出,data在clk的高電平和低電平都有傳輸數(shù)據(jù)。
數(shù)據(jù)通道進(jìn)入和退出SLM(即睡眠模式)的控制:
mipi信號(hào)傳輸分為單端和差分傳輸。例如:
LP-00, LP-01, LP-10, LP-11 (單端)
HS-0, HS-1 (差分)
Ultra-Low Power State entry command: 00011110 是差分傳輸,讀取方法和上面提到的clk是一樣的,需要注意的是Dp和Dn如果同時(shí)是高電平或同時(shí)是低電平的時(shí)候是無(wú)效數(shù)據(jù),這個(gè)時(shí)候大概對(duì)應(yīng)的是clk正弦的峰值,只有其中一個(gè)是高一個(gè)是低才是有效的差分?jǐn)?shù)據(jù)。
總結(jié):
對(duì)應(yīng)于同步信號(hào)完成并串轉(zhuǎn)換;
*HS 狀態(tài)為高速低壓差分信號(hào),傳輸高速連續(xù)串行數(shù)據(jù);
*LP 狀態(tài)為低速低功耗信號(hào),傳輸控制信號(hào)和狀態(tài)信號(hào);
*MIPI要求HS 工作在1GHz 的頻率下,完成共模信號(hào)為0.2v 差模信號(hào)為0.2v 的差分
信號(hào)的傳輸;
*LP 傳遞控制信號(hào),要求高電平為1.2v 低電平為0的電平信號(hào)輸出;
*HS 及LP 狀態(tài)下,輸出信號(hào)的電學(xué)特性要求非常苛刻,具體電學(xué)性能的要求可見(jiàn)
附帶文檔表格。
*MIPI是雙向可選的,可以高速發(fā)送,也可以進(jìn)行高速接收,或收發(fā)功能同時(shí)具備,
我們目前根據(jù)需求僅做了發(fā)送功能;
*MIPI的HS模式(0.2V),傳送圖像數(shù)據(jù),速度為80Mbps ~ 1000Mbps;
*MIPI的LP模式(1.2V),可以用于傳送控制命令,最高速度為10Mbps;
*MIPI規(guī)定,任一個(gè)MIPI設(shè)備必須Escape Mode,此為L(zhǎng)ow Power Data
Trabsmission Mode,LP模式中的一種,此模式下可低速傳輸圖像或其他數(shù)據(jù)。
*MIPI規(guī)定了Low Power Mode、 Ultra Low Power Mode的電壓范圍、以及它們
之間、它們與HS模式之間的相互切換方式或相關(guān)要求;
*MIPI D-PHY是各個(gè)MIPI工作組共用的物理層規(guī)范;
最后,需要注意一點(diǎn):
BTA:bus turn around,用來(lái)host接受外設(shè)發(fā)送命令或應(yīng)答信號(hào)用的,如果host DPHY設(shè)置了這個(gè),
但是lcd不支持的話(huà),就有可能有問(wèn)題。