模糊控制系統(tǒng)的核心是模糊控制器,由模糊化、模糊推理、模糊判決(反模糊化)三部分組成,模糊控制工作原理見(jiàn)圖1,其中慮線部分表示模糊控制器;e、ec分別表示實(shí)測(cè)值與設(shè)定值的偏差及偏差變化率;E,EC
2021-01-24 10:36:00 2932
2932 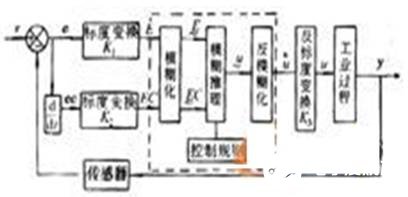
本人想做個(gè)基于lv的
模糊PID控制。雙輸入(e,ec)單輸出的。看到別人做的(如圖),其中的輸入傳函在那個(gè)模塊中有?求大神解答。要是有例子的能發(fā)一份就更好了。我的lv是2011版本的,郵箱是
[email protected]。 小弟在此先謝過(guò)了!
2013-01-29 16:47:26
請(qǐng)問(wèn)有沒(méi)有人會(huì)模糊PID的labview實(shí)現(xiàn),最好有例程,謝謝大家了!
2017-12-04 11:50:11
有關(guān)于模糊PID控制算法的學(xué)習(xí)資料嗎
2017-03-29 15:49:07
怎么使用模糊Pid控制四相五線的步進(jìn)電機(jī)呀
2020-05-20 23:36:59
過(guò)程是首先根據(jù)專家或熟練工人的知識(shí)和經(jīng)驗(yàn)獲取相應(yīng)測(cè)量領(lǐng)域的一級(jí)數(shù)值/語(yǔ)言變換策略,然后應(yīng)用模糊推理方法求取相應(yīng)隸屬函數(shù)。Foulloy提出了基于語(yǔ)義關(guān)系的概念生成方法,首先,由論域的意義來(lái)定義一個(gè)通用
2018-10-24 14:21:49
有人能給一份模糊控制的例子嗎?利用工具箱做的。
2016-05-13 10:52:03
labview中模糊控制模糊控制相關(guān)范例里都有加載.fs這樣一個(gè)文件,好像是模糊控制器。有誰(shuí)知道怎樣創(chuàng)建這樣的模糊控制器啊,有沒(méi)有例子給發(fā)一個(gè),謝謝了!
2012-03-08 23:59:11
模糊控制倒立擺程序
2018-10-04 10:42:46
。并將該方法運(yùn)用到實(shí)際生產(chǎn)中,初步解決了印染工藝過(guò)程中生產(chǎn)因素不穩(wěn)定所造成的質(zhì)量偏差問(wèn)題。關(guān)鍵詞模糊控制;智能控制;印染工藝[hide] [/hide]
2009-08-08 09:37:02
請(qǐng)問(wèn)如圖設(shè)計(jì)模糊控制器,輸入三個(gè)隸屬度函數(shù),想以隸屬度最大方法決定輸出值,輸出位離散的1,2,5三個(gè)值,為何輸出圖像沒(méi)有最后的5,去模糊化應(yīng)選擇哪個(gè)方法?多謝!
2018-01-08 21:25:37
1、 模糊集(E,CE,CU)隸屬度賦值表及模糊控制查詢表表2 模糊變量E的賦值表eμE-6-5-4-3-2-1-0+0+1+2+3+4+5+6
2017-04-14 11:33:08
模糊數(shù)學(xué)matlab模糊數(shù)學(xué)+變分法+Matlab基礎(chǔ)教程.doc 模式識(shí)別及識(shí)別的直接方法在日常生活中生活中,經(jīng)常需要進(jìn)行各種判斷、預(yù)測(cè)。如圖象文字識(shí)別、故障(疾病)的診斷
2008-06-18 13:36:26
今天做了一個(gè)模糊控制的程序,遇到一個(gè)問(wèn)題,求助大神這是在電腦上跑VI,其中模糊模塊運(yùn)行正常這是在NI crio控制器上跑,發(fā)現(xiàn)模糊模塊有輸入無(wú)輸出,而且發(fā)現(xiàn)STATUS為紅色。但是設(shè)置方式和之前一樣。萬(wàn)分感謝
2018-09-10 23:17:36
模糊系統(tǒng)建模.zip
2018-01-07 12:15:13
模糊系統(tǒng)建模應(yīng)用-自適應(yīng)模糊控制.zip
2018-01-07 12:16:28
模糊系統(tǒng)設(shè)計(jì)原理.zip
2018-01-07 12:17:45
模糊系統(tǒng)辨識(shí)仿真程序
2018-01-04 13:30:37
模糊系統(tǒng)辨識(shí)仿真程序.zip
2018-01-07 12:14:05
我的筆記本是1920*1080的分辨率 但是用AD軟件的時(shí)候,軟件界面的字體都是模糊的,這個(gè)怎么解決啊?希望有經(jīng)驗(yàn)的大神 幫忙解決解決啊
2019-03-01 06:36:05
效率低下,所以,網(wǎng)絡(luò)圖片成為很多人的選擇,而網(wǎng)絡(luò)圖片往往因?yàn)樘厥庖蛩叵袼仄停逦炔粔颍@時(shí)候,大家也許需要一款智能的圖像清晰化軟件來(lái)解決這個(gè)痛點(diǎn),這里我給大家推薦一款人工智能模糊視頻模糊人像模糊圖像
2021-08-07 22:34:26
`沒(méi)事瞎折騰,一塊走時(shí)極不準(zhǔn)的鐘表,大LCD屏,就想著做個(gè)精準(zhǔn)的時(shí)鐘,用的DS3231和HT16C21(不是HT1621也不是1621B),結(jié)果碰到顯示模糊的問(wèn)題,解決不了這次折騰就算失敗了~~~請(qǐng)
2019-01-07 20:51:22
請(qǐng)問(wèn)各位,請(qǐng)問(wèn)哪里有較好的labview設(shè)計(jì)模糊PID的講解或例子,我現(xiàn)在搞迷糊了。還有請(qǐng)問(wèn)軟件中每個(gè)PID示例里會(huì)有一個(gè)花盆的控件,請(qǐng)問(wèn)這是做什么用的呢,是不是模糊PID也需要呢?
2020-06-21 10:01:05
MATLAB設(shè)計(jì)模糊控制器并用simulink仿真
2019-08-12 14:15:54
在實(shí)際的控制系統(tǒng)中,線性系統(tǒng)畢竟是少數(shù),大部分的系統(tǒng)屬于非線性系統(tǒng),或者說(shuō)是系統(tǒng)模型不確定的系統(tǒng),如果控制精度要求較高的話,那么對(duì)于參數(shù)的整定過(guò)程是有難度的。專家 PID 和模糊 PID 就是為滿足
2021-07-19 06:29:49
framebuffer里面是正常的,但硬件從framebuffer輸出到屏幕出現(xiàn)了模糊。測(cè)試試過(guò)所有顯示器都有這個(gè)現(xiàn)象,包括17寸、19寸、24寸1080p也有這個(gè)問(wèn)題。同時(shí)也測(cè)過(guò)VGA和HDMI輸出,現(xiàn)象一樣。請(qǐng)問(wèn)這個(gè)是什么問(wèn)題?是顯示驅(qū)動(dòng)的問(wèn)題嗎?謝謝!!
2022-11-08 17:12:03
統(tǒng)一建模語(yǔ)言UML的特點(diǎn)是什么?UML在車(chē)載GPS終端設(shè)計(jì)中的應(yīng)用是什么?
2021-12-27 06:28:43
求labviEW中使用模糊控制的具體步驟,謝謝~{:1:}
2013-05-09 16:23:38
有誰(shuí)知道怎么將模糊控制和pid連接在一起呢?最好有相關(guān)的程序vi文件借鑒參考。不要調(diào)用控件
2020-03-12 19:13:40
如何將labview中的模糊控制器和pid結(jié)合在一起,利用模糊化后自動(dòng)調(diào)整pid的三個(gè)參數(shù)Kp、KI、Kd,做簡(jiǎn)單的仿真模擬呢?希望有簡(jiǎn)單的例子可以用來(lái)探討。labview自帶的例子只有單獨(dú)的一個(gè)模塊的運(yùn)用,并沒(méi)有將兩者聯(lián)合在一起的實(shí)例vi,會(huì)的人也可以可以私聊我或者直接回復(fù),另有答謝啊!!
2020-03-26 08:54:34
如圖,字體模糊,linux 3.14.38qt 4.8.5imx6ul平臺(tái)
2022-01-10 06:04:48
`OpenCV有幾個(gè)函數(shù),是可以將圖像進(jìn)行模糊處理的,但其實(shí)是幾個(gè)濾波的函數(shù)。一、medianBlur函數(shù)這個(gè)函數(shù)就是一個(gè)中值濾波的函數(shù),但是運(yùn)行的結(jié)果就是把圖像變模糊。原程序如下:這里要使用一個(gè)
2016-06-19 23:18:52
Matlab模糊控制工具箱為模糊控制器的設(shè)計(jì)提供了一種非常便捷的途徑,通過(guò)它我們不需要進(jìn)行復(fù)雜的模糊化、模糊推理及反模糊化運(yùn)算,只需要設(shè)定相應(yīng)參數(shù),就可以很快得到我們所需要的控制器,而且修改也非常
2021-09-07 07:19:13
應(yīng)用技術(shù)和模糊控制技術(shù)的工程技術(shù)人員使用,也可做為電子技術(shù),計(jì)算機(jī)控制技術(shù)、自動(dòng)化及儀表類(lèi)的教師和學(xué)生的教學(xué)參考書(shū),同時(shí)對(duì)家用電器領(lǐng)域的維修人員也大有裨益。
按照先易后難、由淺入深以及重在應(yīng)用的原則
2023-09-19 07:07:05
法達(dá)到理想的控制效果。人工智能的興起和快速發(fā)展為控制領(lǐng)域提供了全新的方法。模糊控制是人工智能控制的一個(gè)重要分支,它是運(yùn)用模糊數(shù)學(xué)的基本理論和方法,把規(guī)則的條件、操作用模糊集表示,并把這些模糊控制
2019-04-17 09:40:02
S3C2410高速嵌入式微處理器作為恒流源的控制、顯示和輸出電流檢測(cè)核心,運(yùn)用模糊控制算法實(shí)時(shí)控制,實(shí)現(xiàn)20mA到2000mA高精度恒流源。 關(guān)鍵詞:恒流源;模糊控制;ARM9處理器S3C2410
2018-11-13 10:53:53
1 引言遠(yuǎn)程康復(fù)是一項(xiàng)現(xiàn)代信息及通信技術(shù)與康復(fù)醫(yī)學(xué)相結(jié)合的多學(xué)科交叉課題,它可以被定義為:在綜合運(yùn)用通信、遠(yuǎn)程感知、遠(yuǎn)程控制、計(jì)算機(jī)、信息處理等技術(shù)的基礎(chǔ)上,實(shí)現(xiàn)的遠(yuǎn)方康復(fù)醫(yī)療服務(wù)。國(guó)外在此方面
2010-12-21 10:17:23
模糊-PID控制技術(shù)運(yùn)用到程控電壓源的設(shè)計(jì)中,從而使得電壓源的輸出電壓值達(dá)到預(yù)定的要求,提高輸出電壓的精度和反應(yīng)速度。采用51單片機(jī),利用adc0832和DAC0832,通過(guò)220V市電通過(guò)整流
2021-07-19 08:32:55
大家好,最近做模糊控制,請(qǐng)問(wèn)誰(shuí)有模糊控制的電子教材或相關(guān)資料麻煩上傳一份啊,先謝謝了
2016-12-20 21:18:34
無(wú)刷直流電機(jī)的模糊PID控制 無(wú)刷直流電機(jī)的轉(zhuǎn)速控制系統(tǒng)如下圖,圖中有速度環(huán)和電流環(huán)。 然后給出在Simulink中與之相對(duì)應(yīng)的速度電流雙閉環(huán)調(diào)速系統(tǒng)結(jié)構(gòu)圖圖中WASR和WACR分別為速度控制器
2016-02-01 10:25:56
JS分類(lèi)樹(shù)的模糊匹配
2019-11-06 07:08:32
氣動(dòng)柔性球關(guān)節(jié)的模糊PID控制介紹了新型氣動(dòng)柔性球關(guān)節(jié),討論研究其控制方法。綜合模糊控制和PID 控制的特點(diǎn),設(shè)計(jì)針對(duì)氣動(dòng)柔性球關(guān)節(jié)的模糊PID 控制器,實(shí)現(xiàn)對(duì)球關(guān)節(jié)彎曲角度、偏轉(zhuǎn)方向等系統(tǒng)參數(shù)
2009-08-08 09:34:49
小弟最近研究模糊PID控制,有幾個(gè)疑問(wèn)首先說(shuō)明:e = 設(shè)定值 - 測(cè)量值ec= 現(xiàn)在的e - 前一個(gè)e模糊規(guī)則后的修正值:_Kp,_Ki,_Kd初始PID參數(shù) Kp,Ki,Kde,ec,_Kp
2017-05-06 11:10:19
電視機(jī)顯示模糊
2012-07-26 22:15:15
的跟蹤補(bǔ)償效果,抖動(dòng)壓縮比達(dá)到90%以上,抖動(dòng)均方差小于1 pixel,定位精度約為1μrad。【關(guān)鍵詞】:空間光通信;;捕獲、瞄準(zhǔn)和跟蹤(ATP)精跟蹤;;模糊控制;;前饋補(bǔ)償【DOI】:CNKI
2010-04-23 11:31:12
。 LabVIEW的模糊邏輯工具箱(Fuzzy Logic for G Toolkit)用于設(shè)計(jì)基于規(guī)則的模糊控制器[2],主要應(yīng)用領(lǐng)域為工業(yè)過(guò)程控制及專家系統(tǒng)。它由4個(gè)子VI組成: ①模糊邏輯控制器
2019-05-09 09:40:12
基于Matlab的模糊邏輯工具箱的模糊控制系統(tǒng)仿真
2008-06-19 14:56:15 64
64 單片機(jī)模糊模糊控制是目前在控制領(lǐng)域所采用的三種智能控制方法中最具實(shí)際意義的方法。模糊控制的采用解決了大量過(guò)去人們無(wú)法解決的問(wèn)題,并且在工業(yè)控制、家用電器和各
2008-12-13 23:13:03172 模糊系統(tǒng)與模糊控制教程共31章,內(nèi)容包括模糊數(shù)學(xué)與模糊邏輯中一些對(duì)于模糊系統(tǒng)理論有用的概念和原理,模糊系統(tǒng)的各組成部分,設(shè)計(jì)模糊系統(tǒng)的四種方法,模糊控制與非自適
2009-01-14 22:40:480 以計(jì)算機(jī)數(shù)據(jù)庫(kù)為依托,充分利用多種通信業(yè)務(wù)資料,建立起一種綜合評(píng)估固定通信臺(tái)站值勤維護(hù)質(zhì)量的數(shù)學(xué)模型-模糊綜合評(píng)估模型。應(yīng)用該模型可以更全面客觀地對(duì)臺(tái)站值勤維
2009-03-03 11:42:319 模糊系統(tǒng)是一種基于知識(shí)或基于規(guī)則的系統(tǒng),模糊知識(shí)處理技術(shù)的發(fā)展引起模糊集理論出現(xiàn)了各種拓展。首先敘述了模糊集理論的形成與發(fā)展,以及模糊集理論在人工智能、知識(shí)處
2009-03-29 14:39:199 本文運(yùn)用模糊控制與PID 控制分別對(duì)同一受控對(duì)象進(jìn)行控制。通過(guò)MATLAB 仿真,表明了模糊控制與傳統(tǒng)的PID控制相比明顯地改善了控制系統(tǒng)的動(dòng)態(tài)性能。關(guān)鍵詞:模糊控制,PID 控制
2009-06-11 08:54:4736 模糊控制的設(shè)計(jì)核心是模糊控制器的設(shè)計(jì)。為了獲得一般模糊控制器的設(shè)計(jì),闡明了模糊控制的原理、模糊控制的特點(diǎn)和重要應(yīng)用。采用兩個(gè)模糊輸入量、一個(gè)模糊輸出量的模糊控
2009-06-16 09:53:1318 本文提出了一種基于數(shù)據(jù)融合的模糊控制器設(shè)計(jì)方法,該方法運(yùn)用最優(yōu)控制方法設(shè)計(jì)融合函數(shù),降低模糊控制器的輸入變量維數(shù),大大減少了模糊控制的規(guī)則數(shù),成功的解決了模
2009-06-19 11:21:0214 提出了一種基于模糊控制器的干線控制算法,該算法有兩個(gè)模糊控制器:綠燈延長(zhǎng)時(shí)間模糊控制器和相位決定模糊控制器。前者決定當(dāng)前綠燈相位的結(jié)束時(shí)刻,后者根據(jù)各相位的緊
2009-08-15 10:39:4320 飛機(jī)系統(tǒng)液壓缸的性能直接影響到飛行安全。本文探討了對(duì)飛機(jī)液壓缸性能測(cè)試的方法,設(shè)計(jì)了液壓缸性能測(cè)試的軟、硬件試驗(yàn)平臺(tái),研究了模糊PID 控制算法在液壓缸性能測(cè)試中的
2009-08-28 10:17:2115 將模糊控制和預(yù)測(cè)控制相結(jié)合,提出了一種新型的模糊預(yù)測(cè)控制方案,應(yīng)用于非線性、大延遲、強(qiáng)耦合的鍋爐燃燒系統(tǒng)中,并運(yùn)用風(fēng)/煤比模糊自尋優(yōu)控制方法來(lái)提高鍋爐燃燒的效
2009-09-01 11:04:0125 該文指出曹蘇群等人提出的基于模糊Fisher 準(zhǔn)則(FFC)的半模糊聚類(lèi)算法(FFC-SFCA)中的一個(gè)推導(dǎo)錯(cuò)誤,結(jié)合模糊緊性和分離性(FCS)聚類(lèi)算法提出新的聚類(lèi)算法:FFC-FCS。FFC-FCS 充分利用FFC 的
2010-02-10 14:34:1515 針對(duì)風(fēng)向變化的隨機(jī)性和不確定性等特點(diǎn),在LabVIEW平臺(tái)上,利用其模糊控制工具包對(duì)風(fēng)力發(fā)電機(jī)偏航系統(tǒng)的風(fēng)向模糊控制進(jìn)行了仿真。進(jìn)行了模糊控制規(guī)則的制定,I/O測(cè)試,模糊控制仿真
2010-02-21 11:27:1140 倒立擺系統(tǒng)是多變量、非線性、強(qiáng)耦合的控制系統(tǒng)。采用模糊控制理論研究二級(jí)倒立擺控制問(wèn)題。運(yùn)用最優(yōu)控制方法設(shè)計(jì)融合函數(shù)以降低模糊控制器的維數(shù),減少模糊控制規(guī)則數(shù),
2010-12-29 17:29:0846 本書(shū)介紹了模糊數(shù)學(xué)在自動(dòng)化中的應(yīng)用,反映了這一領(lǐng)域中模糊應(yīng)用技術(shù)的新進(jìn)展,
2011-02-16 17:38:2239 針對(duì)多路口交通控制的特征及實(shí)際交通狀況,對(duì)已有模糊控制算法進(jìn)行了改進(jìn),在單路口模糊控制研究的基礎(chǔ)上,研究了基于相序優(yōu)化模糊控制的城市區(qū)域交通信號(hào)控制系統(tǒng)。此方法不
2012-02-16 16:41:2543 針對(duì)傳統(tǒng)的故障樹(shù)分析法在故障診斷中存在的缺點(diǎn)和不足,文中將模糊理論運(yùn)用到故障診斷中,提出基于T-S的模糊故障樹(shù)的故障診斷法。介紹了T-S模糊模型及算法,建立了診斷系統(tǒng)的故
2013-04-15 19:30:3631 針對(duì)彈藥輸送車(chē)載供彈系統(tǒng)故障的復(fù)雜性、多樣性故障難以診斷的問(wèn)題,提出了一種基于模糊神經(jīng)網(wǎng)絡(luò)彈藥輸送車(chē)載供彈系統(tǒng)故障診斷方法。該方法運(yùn)用模糊神經(jīng)網(wǎng)絡(luò)理論基礎(chǔ)和優(yōu)點(diǎn),
2013-05-02 16:48:4617 模糊PID溫控儀表模糊PID溫控儀表模糊PID溫控儀表。
2016-03-16 15:27:4621 模糊系統(tǒng)、模糊神經(jīng)網(wǎng)絡(luò)及應(yīng)用程序設(shè)計(jì)-上科。
2016-04-11 17:14:030 模糊邏輯與模糊推理,感興趣的小伙伴們可以瞧一瞧。
2016-11-18 17:59:132 基于模糊神經(jīng)網(wǎng)絡(luò)的起動(dòng)機(jī)測(cè)試儀智能診斷系統(tǒng)_張墩利
2017-02-07 18:11:350 模糊集合的邏輯運(yùn)算實(shí)質(zhì)上就是隸屬函數(shù)的運(yùn)算過(guò)程。采用隸屬函數(shù)的取大(MAX)-取小(MIN)進(jìn)行模糊集合的并、交邏輯運(yùn)算是目前最常用的方法。但還有其它公式,這些公式統(tǒng)稱為“模糊算子”。
2017-12-06 14:58:390 模糊系統(tǒng)建模應(yīng)用-自適應(yīng)模糊控制
2017-12-06 14:57:470 模糊神經(jīng)網(wǎng)絡(luò)就是模糊理論同神經(jīng)網(wǎng)絡(luò)相結(jié)合的產(chǎn)物,它匯集了神經(jīng)網(wǎng)絡(luò)與模糊理論的優(yōu)點(diǎn),集學(xué)習(xí)、聯(lián)想、識(shí)別、信息處理于一體。
2017-12-29 14:40:4047540 
了一種基于模糊算法、模糊PID控制技術(shù)以及STM32 ARM Cortex-M3內(nèi)核單片機(jī)的茶葉理?xiàng)l機(jī)雙模糊控制系統(tǒng)設(shè)計(jì)。運(yùn)用Matlab對(duì)傳統(tǒng)PID控制系統(tǒng)與雙模糊控制系統(tǒng)進(jìn)行了計(jì)算機(jī)控制系統(tǒng)仿真,并在上洋機(jī)械生產(chǎn)的6CL2-60型茶葉理?xiàng)l機(jī)上進(jìn)行了兩種控制系統(tǒng)實(shí)驗(yàn)
2018-02-28 10:07:401 相關(guān)研究領(lǐng)域的廣泛關(guān)注。因此,多位學(xué)者對(duì)如何將FCM算法拓展到直覺(jué)模糊領(lǐng)域進(jìn)行了研究,賀正洪將聚類(lèi)對(duì)象及聚類(lèi)中心點(diǎn)用直覺(jué)模糊集表示,提出基于直覺(jué)模糊集合的模糊c均值算法。申曉勇聚類(lèi)對(duì)象和聚類(lèi)中心點(diǎn)及兩者間的關(guān)系均推廣到直覺(jué)模糊領(lǐng)域,提出了一種基于目標(biāo)函數(shù)的
2018-03-14 10:08:431 8自由度仿真模型,采用控制魯棒性較強(qiáng)的模糊PID的ABS控制策略,對(duì)客車(chē)在高低附著系數(shù)路面制動(dòng)轉(zhuǎn)彎的情況下進(jìn)行了硬件在環(huán)測(cè)試。測(cè)試結(jié)果表明:該控制算法能有效提高汽車(chē)穩(wěn)定性,使滑移率較好地控制在最佳值0.2附近,具有更好的魯棒性和自適應(yīng)能力。
2018-03-22 09:45:111 模糊控制的基本思想是將人類(lèi)專家對(duì)特定對(duì)象的控制經(jīng)驗(yàn),運(yùn)用模糊集理論進(jìn)行量化,轉(zhuǎn)化為可數(shù)學(xué)實(shí)現(xiàn)的控制器從而實(shí)現(xiàn)對(duì)被控對(duì)象的控制。模糊控制器的基本工作原理是:將測(cè)量得到的被控對(duì)象的狀態(tài)經(jīng)過(guò)模糊化接口轉(zhuǎn)換
2018-04-13 15:49:5312 模糊傳感器是在經(jīng)典傳感器數(shù)值測(cè)量的基礎(chǔ)上,經(jīng)過(guò)模糊推理與知識(shí)集成,以自然語(yǔ)言符號(hào)描述的形式輸出測(cè)量結(jié)果的智能傳感器。
2020-12-14 16:56:292329 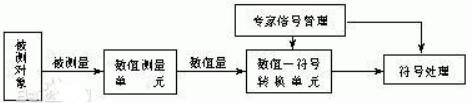
導(dǎo)向式灰盒模糊測(cè)試是一種能夠快速對(duì)程序指定位置進(jìn)行測(cè)試的技術(shù)。通過(guò)對(duì)當(dāng)前導(dǎo)向式灰盒模糊測(cè)試技術(shù)導(dǎo)向不夠精確的問(wèn)題進(jìn)行分析,提岀一種新的導(dǎo)向式灰盒模糊測(cè)試方法,并引入基本塊權(quán)重與函數(shù)路徑長(zhǎng)度的概念
2021-03-21 11:01:357 導(dǎo)向式灰盒模糊測(cè)試是一種能夠快速生成測(cè)試用例,達(dá)到給定程序目標(biāo)區(qū)域并且發(fā)現(xiàn)漏洞的模糊測(cè)試技術(shù)。針對(duì)當(dāng)前導(dǎo)向式模糊測(cè)試難以通過(guò)魔術(shù)字節(jié)等檢查語(yǔ)句,且對(duì)目標(biāo)區(qū)域路徑覆蓋率較低的問(wèn)題,提出結(jié)合混合符號(hào)執(zhí)行
2021-03-26 14:46:3614 畢達(dá)哥拉斯模糊集是 Zadeh模糊集的一種推廣形弌,其相似度刻畫(huà)方法是畢達(dá)哥拉斯模糊集理論的重要硏究?jī)?nèi)容現(xiàn)有的畢達(dá)哥拉斯模糊集相似度大多針對(duì)具體問(wèn)題而提岀。為推廣畢達(dá)哥拉斯模糊集理論的應(yīng)用范圍,文中
2021-04-20 10:56:499 。但是這一消息傳遞機(jī)制可能被濫用,例如應(yīng)用程序?qū)㈠e(cuò)誤消息發(fā)送給目標(biāo)應(yīng)用程序,從而導(dǎo)致目標(biāo)應(yīng)用程序崩潰。針對(duì)這個(gè)問(wèn)題,提岀一種基于模糊測(cè)試的健壯性檢測(cè)方法,并實(shí)現(xiàn)了意圖模糊測(cè)試工具 Iccdroidfuκzer。該方法通過(guò)靜態(tài)分析獲取組件相關(guān)信息來(lái)
2021-04-25 14:09:298 針對(duì)白盒模糊測(cè)試中的環(huán)境交互問(wèn)題,提岀一種基于外部函數(shù)探測(cè)和校正的隱藏路徑搜索方案 HPSBEF。利用約束求解獲取外部函數(shù)在執(zhí)行新路徑時(shí)的輸出值,并將結(jié)果記錄在鏈表中,在執(zhí)行該路徑時(shí)檢測(cè)其中的外部
2021-06-07 14:56:366 為在語(yǔ)言解釋器的模糊測(cè)試中構(gòu)造符合語(yǔ)言規(guī)范的樣本,并盡可能地得出異常測(cè)試結(jié)果以便發(fā)現(xiàn)漏洞,釆用改進(jìn)的概率上下文無(wú)關(guān)語(yǔ)法模型控制樣本的變異過(guò)程,對(duì)變異結(jié)果中的未定義變量進(jìn)行修正以提高符合語(yǔ)言規(guī)范的樣本
2021-06-11 10:52:328 然而,對(duì)于嵌入式模糊測(cè)試來(lái)說(shuō),代碼覆蓋率數(shù)字很難解釋,因?yàn)榇蟛糠执a對(duì)于模糊向量來(lái)說(shuō)是不可訪問(wèn)的;例如,獨(dú)立于接口運(yùn)行的外圍設(shè)備的設(shè)備驅(qū)動(dòng)程序。因此,很難為嵌入式系統(tǒng)定義“完整的代碼覆蓋率”——也許
2022-07-15 08:17:021069 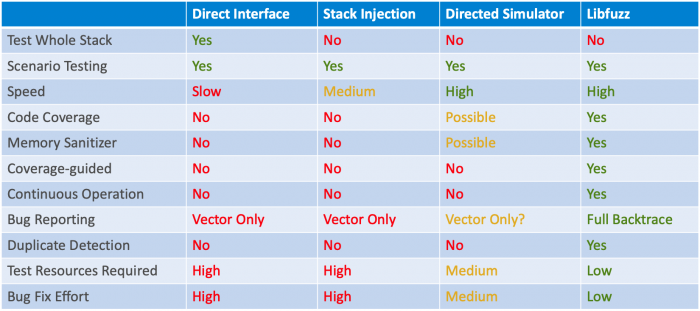
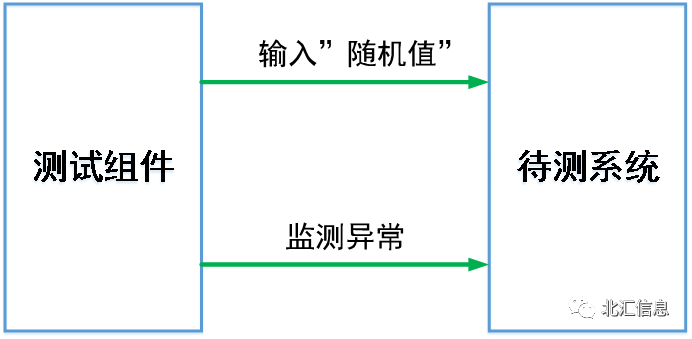
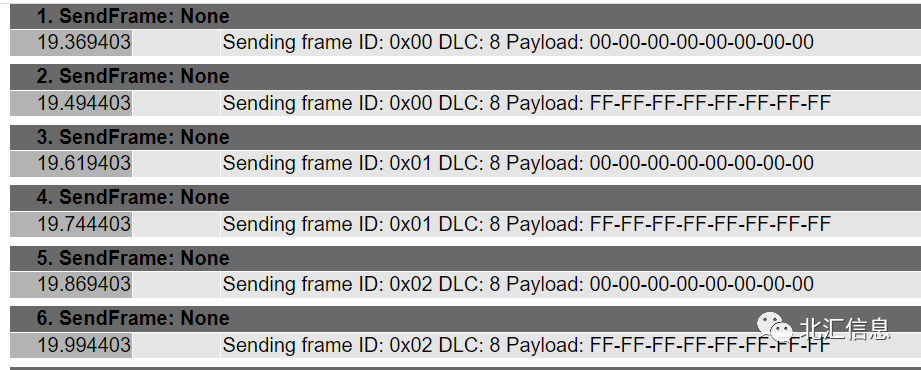
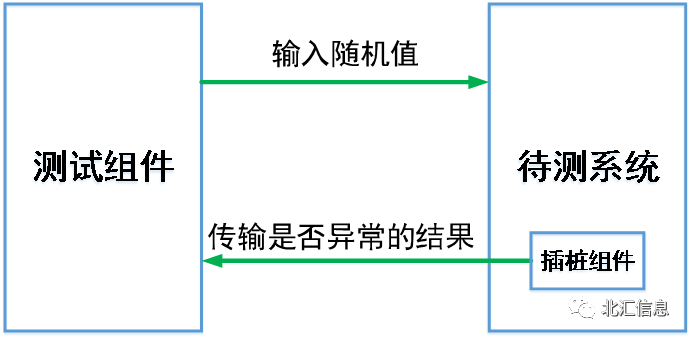
隨機(jī)值可以是正常的數(shù)據(jù),也可以是非預(yù)期的數(shù)據(jù),通常可以通過(guò)變異(篡改原有數(shù)據(jù))和生成(通過(guò)規(guī)則偽造數(shù)據(jù))來(lái)獲得。且整個(gè)測(cè)試不是找?guī)讉€(gè)隨機(jī)值來(lái)做測(cè)試,而是不斷地輸入大量的隨機(jī)值(可以理解為無(wú)窮盡)來(lái)做長(zhǎng)時(shí)間的持續(xù)測(cè)試。
2022-09-26 14:49:44571 車(chē)載通信是實(shí)現(xiàn)車(chē)聯(lián)網(wǎng)(“人-車(chē)-路-云”)的數(shù)據(jù)交換。在車(chē)聯(lián)網(wǎng)中,考慮到相機(jī)、顯示器、車(chē)載雷達(dá)等其他傳感器數(shù)量的持續(xù)增加,車(chē)內(nèi)的數(shù)據(jù)傳輸和網(wǎng)絡(luò)帶寬成為人們關(guān)注的焦點(diǎn)。
2022-10-15 09:41:26883 所謂模糊控制,就是對(duì)難以用已有規(guī)律描述的復(fù)雜系統(tǒng),采用自然語(yǔ)言(如大,中,小)加以描述,借助定性的,不精確的以及模糊的條件語(yǔ)句來(lái)表達(dá),模糊控制是一種基于語(yǔ)言的智能控制。
2023-03-01 14:22:513230 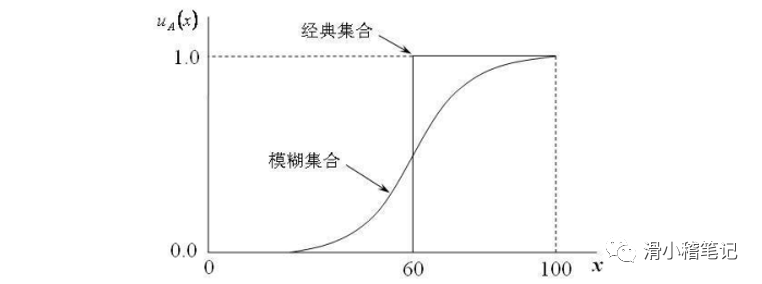
模糊控制器是一種基于模糊邏輯的控制器,通過(guò)將輸入變量和輸出變量都表示為模糊量,并運(yùn)用模糊推理來(lái)實(shí)現(xiàn)針對(duì)復(fù)雜系統(tǒng)的控制。與傳統(tǒng)的控制器相比,模糊控制器更加適合那些難以建模或者模型不精確的系統(tǒng)。
2023-03-17 18:12:182545 靜電測(cè)試儀的不同種類(lèi)在不同領(lǐng)域的運(yùn)用,比如說(shuō):電視、廣播、電影等。這些都是需要使用到它們的地方。
2023-04-13 10:12:35895 
模糊化有可能在測(cè)試過(guò)程中培養(yǎng)效率目標(biāo),縮小測(cè)試范圍。
2023-06-12 11:35:00297 
又常常能發(fā)現(xiàn)一些核心、嚴(yán)重的BUG,因此其在整個(gè)測(cè)試體系中有著重要的地位,且這種測(cè)試方法也已“潤(rùn)物細(xì)無(wú)聲”地融入到我們的測(cè)試活動(dòng)中了。本次就為大家介紹如何在車(chē)載通
2022-09-15 11:09:06354 
車(chē)載測(cè)試是什么 車(chē)載測(cè)試是指在汽車(chē)領(lǐng)域中對(duì)車(chē)輛及其相關(guān)系統(tǒng)進(jìn)行測(cè)試和診斷的過(guò)程。它是一種系統(tǒng)性的測(cè)試方法,旨在評(píng)估車(chē)輛的功能、性能、安全性、可靠性并確保其符合預(yù)定的標(biāo)準(zhǔn)和規(guī)范。 車(chē)載測(cè)試主要包含
2023-07-19 11:03:112734 ETAS推出ESCRYPT CycurFUZZ:快速模糊測(cè)試,提高網(wǎng)絡(luò)彈性
2023-11-24 15:14:53364
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論