 電子發燒友App
電子發燒友App


???? 關鍵詞:動目標顯示,改善因子,自適應對消
1 引 言
近年來,增強對動目標的捕獲、跟蹤、顯示和檢測已成為發展新的光電綜合測量系統的關鍵技術之一。隨著電子器件性能的提高和數字信號處理技術的進步,動目標處理技術獲得了長足的發展。動目標顯示技術發展的主要目的是為了增強雷達的目標檢測能力并顯示出運動目標。它能夠檢測到那些存在于各種雜波中具有不同徑向運動速度的目標反射信號。其中雷達的雜波是指從地面、海面、空中云雨、箔條、鳥類、昆蟲及極光等物體反射得到的回波,表述為地雜波、海雜波、氣象雜波、“仙波”等等。上述列舉出的雷達雜波信號與雷達接收機的噪聲信號有本質上的區別,在連續的兩個發射脈沖之間雜波信號是相關的,而噪聲是不相關的。動目標顯示技術就是利用了雜波的特性濾除雷達回波中的雜波信號,從而顯示出雷達作用范圍內的運動目標,使光電綜合測量技術向自動化、智能化、高精度、全天候、實時處理的方向發展。
2 動目標處理系統的改善因子I與整機相關系統的關系
動目標處理系統的工作質量可以用改善因子I來衡量。改善因子的提高受限于雷達相關部分的性能。如雜波內部的起伏運動,雷達各系統部件的不穩定性,A/D變換器的量化噪聲,正交雙通道幅相不一致等。改善因子I總可用下式表示:![]()
從(1)式可以看出I總的值決定于各種改善因子中最小的那一個。
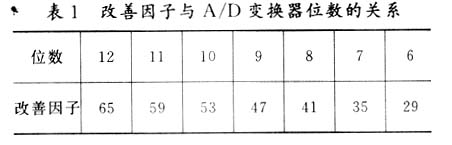
2.1 量化噪聲對改善因子的約束
若A/D變換器位數為b,最高位為符號位,則A/D量化噪聲對改善因子的限制為:
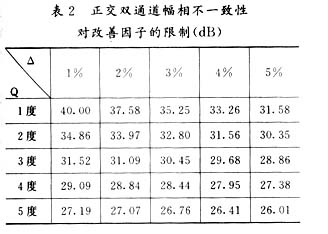
2.2 正交雙通道幅相不一致性對改善因子的約束
采用正交雙通道處理技術,必須考慮I、Q通道的幅相不一致性對系統性能的影響。正交信號UI(t)、UQ(t)的幅度不一致性Δ和相位正交差Q引起的鏡象頻譜分量與理想頻譜分量的功率比為:
從表2中可以看出,若希望動目標處理系統的改善因子大于40dB,I、Q通道的幅度不一致性必須小于1%,相位正交差必須小于1度。
雷達不穩定性對改善因子的限制,主要表現在相位、振幅及脈沖延時不穩定上。在采用磁控管發射機雷達中,動目標處理系統的改善因子I不穩在23dB左右,在某型雷達中采用固態微波源,它比磁控管發射機的頻率、相位穩定性高2個數量級以上,1kHz頻偏處相噪低于-100~110dBC/Hz,底部相噪在-120 dBC/Hz以下,I不穩定在50~60dB之間。
2.4 雜波內部運動對系統改善因子的約束
2.4.1 雜波的頻譜特性
眾所周知,由于雜波內部的無規則運動,各反射單元所反射的回波具有不同的多譜勒頻率,這導致了雜波頻譜的展寬。雜波譜通常具有高斯特性,其功率譜通常近似為:

式中,W(f):雜波的功率譜,W0=W(f)|f=0;
????? f:工作頻率;λ:雷達工作波長;
δc:雜波功率譜標準差,反映了不同工作波長下雜波譜展寬的程度;
δv:雜波運動的標準差,與雜波內部起伏運動的程度有關,與工作波長無關;有δc=2δv/λ。
2.4.2 雜波抑制濾波器分析
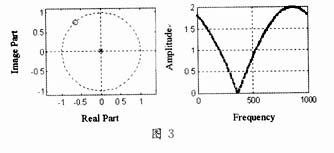
??? (1)固定對消器
為實現對地物雜波的良好抑制,可以采用凹口固定在零頻的對消器。
??? 一次對消器的傳遞函數為:
H1(Z)=(1-Z-1)(5)
??? 二次對消器的傳遞函數為:
??? H2(Z)=(1-Z-1)2(6)
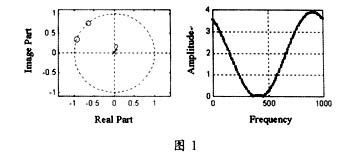
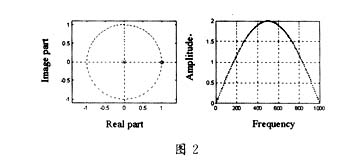
對零均值的離散型雜波,其δC對固定一次對消器和固定二次對消器改善因子的限制:當系統的Fr為1000Hz,δC=13Hz,則有
當工作的Fr較高時,改善因子還會有所提高。上述的一次固定對消器和二次固定對消器,對海浪和氣象雜波有很大限制。
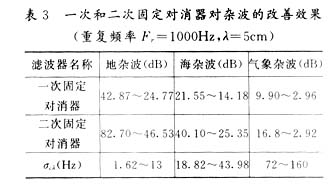
可以看出利用固定對消器不能對海雜波及云雨雜波進行很好的抑制。因此我們采用自適應對消器對海雜波及云雨雜波進行抑制。
??? (2)自適應對消器
為了抑制云、雨、雪等具有可變運動速度的雜波,雜波對消器的凹口必須實時鎖定在雜波平均多譜勒的中心。設雜波平均多譜勒頻率為fdc,雜波運動的徑向速度為VC,雷達工作波長λ(5cm),則它們三者的關系為:fdc=2VC/λ,如果雜波運動的徑向速度變化范圍為:VC=0~60km/h=0~16.67m/s,雜波平均多譜勒頻率fdc=0~±666.67Hz。由于雷達的重復頻率:fr=1000Hz,則自適應對消器凹口可變范圍為0~1000Hz。
??? 自適應一次對消器的傳遞函數為:
![]()
若輸入信號為:
W1=cos(θ1)+jsin(θ1)稱為濾波器的權值。自適應一次對消濾波器通過調整它的權值實現最佳濾波。
??? 自適應二次對消器的傳遞函數為:
![]()
W2=cos(θ2)+jsin(θ2)
自適應對消器的關鍵問題是如何實時獲得與雜波平均多譜勒頻率中心fdc相對應的濾波器的權值,以便將濾波器的凹口鎖定到平均多譜勒頻率中心fdc,并且隨著雜波平均多譜勒頻率中心fdc的變化,實時獲取新的相對應的濾波器的權值WI和WQ,使濾波器的凹口始終跟隨fdc的變化而鎖定到它的中心,以達到最佳的雜波抑制效果,與此相應的使雜波剩余最小的權值即為最佳權值。
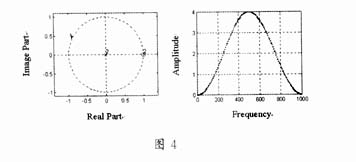
在自適應一次、二次對消中,我們假設雜波以10m/s的速度徑向運動,fdc=2Vrc/λ,所以運動雜波的多譜勒頻率fdc=400Hz,仿真結果如下表4所示。
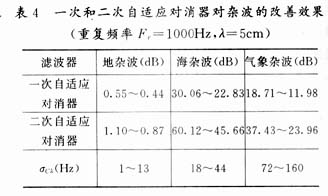
??? 對于自適應濾波器而言,增加濾波階數不能無限制地增加系統改善因子,相反,會增加系統復雜性,降低系統的反應速度。表4均為理想值,在實際應用中指標還應下降3-5kB。[2]

表5示出了在三級海情,四種組合方式下的對消改善效果比較。
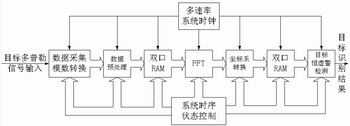
3 動目標處理系統實施方案
(1)采用正交雙通道復信號處理模式,數字正交復信號在進入動目標處理系統前,已經過自適應旁瓣相消與數字脈沖壓縮系統,形成脈沖寬度恒定的數字正交復信號。為保證動目標處理系統的性能,輸入的I、Q支路信號的幅度一致性和相位的正交性必須滿足一定的要求。
(2)采用以現代數字信號處理器ADSP21062為核心,實現對地雜波、海雜波、氣象雜波的自適應濾波。完成多方式的動目標處理,具有設備量小、成本低、可靠性高、運算密集度高、實時性強等特點。
(3)CFAR處理技術,系成熟技術,在此不再贅述。
4 結束語
綜上所述,可以得出如下結論:
(1)A/D變換器位數應大于10位。
(2)正交雙通道幅相不一致性和相位不一致性應分別限制在1%、1度以內。
(3)雷達應選擇高穩定性的微波頻率源。
(4)在不同的情況下選擇不同的對消方式,在觀測地雜波很強的回波時可采用二次固定對消器;在海雜波和氣象雜波較強時,可采用一次固定對消器加二次自適應對消方式,在對消效果不理想時還可以通過自動調整自適應對消器的權系數以獲得最佳的效果。
此方案可以滿足地雜波的改善因子大于40dB,海雜波的改善因子大于35dB,氣象雜波的改善因子大于20dB的要求。提高雷達對運動目標測量和顯示的精確性。
2 陳建春,耿富錄.自適應運動雜波抑制技術.西安:西安電子科技大學學報,1999,26(2):174~177














 工商網監
工商網監
評論