完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > pid
PID=port ID,在STP(生成樹協議)中,若在端口收到的BPDU中BID和path cost相同時,則比較PID來選擇阻塞端口。數字電視復用系統名詞 PID(Packet Identifier) 在數字電視復用系統中它的作用好比一份文件的文件名,我們可以稱它為“標志碼傳輸包” 。
文章:610個 瀏覽:87131次 帖子:795個
`pidof`是一個命令行程序,可讓您找到正在運行程序的進程ID。在教程中,我們將說明如何在Linux 使用pidof命令。
儀表指示出現異常現象(指示偏高、偏低、不變化、不穩定等),本身包含兩種因素:工藝,儀表正確地反映出工藝異常情況;儀表,由于儀表(測量系統)某一環節出現故...

做控制時,大家經常會有這樣的感受“代碼很豐滿,現實很骨感”,這是因為將計算機指令轉移到實際硬件時,由于物體的慣性以及各種非理想化的因素影響,往往會出現實...

臺達PLC和精研變頻器通過串口進行485通訊,主從站控制詳解#plc #電工 #自動化 #制造業 #電氣。
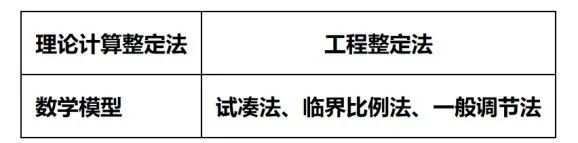
PID 參數整定方法 理論計算整定法:依據系統的數學模型,經過理論計算確定 PID 參數。 這種方法是建立在理想化條件下的,其得到的參數不一定能夠直接使...

常用PID調節器/溫控儀控制算法包括常規PID、模糊控制、神經網絡、Fuzzy-PID、神經網絡PID、模糊神經網絡、遺傳PID及廣義預測等算法。 ...

三相異步電機應用廣泛,但是直接全壓啟動時電流很大(6-8倍),傳統的方法采用如Y-△轉換、自耦變壓器及定子回路串電抗等降壓啟動方法來減小啟動電流,啟動設...
位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉動速度的大小,通過脈沖的個數來確定轉動的角度,也有些伺服可以通過通訊方式直接對速度和位移進行賦值。
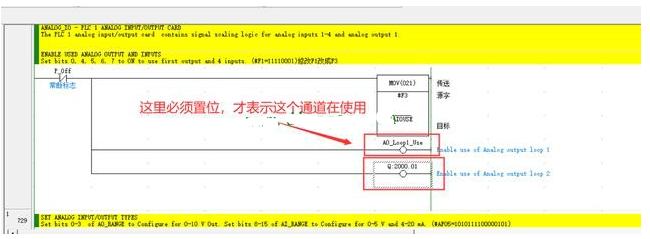
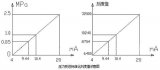
PLC硬件部分的設置如下:因為采集的是電壓輸入(0-5V),所以要處于OFF狀態,這里要結合CJ1W-MAD42,可以去歐姆龍官網進行下載。
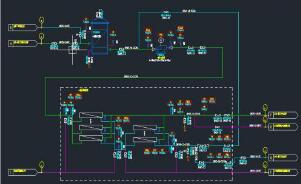
使用GForce-200PLCCPU222進行PID回路控制的原理與調試
GForce-200系列PLC能夠進行PID控制,其CPU最多可支持8個PID控制回路。PID是閉環控制系統中比例-積分-微分控制算法,它可以看作是這三...
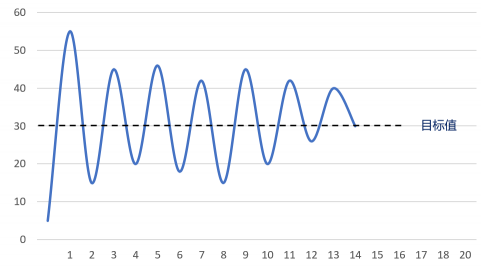
實際調參 從實際的 PID 系統曲線來理解 PID 各個系數的調節效果。 ① 先調整比例系數,積分、微分系數設置為 0,此時的系統只有比例環節參與控制,...
FB41“CONT_C” TIA V16 控制面板 相比較STEP 7 V5.5,TIA V16的控制面板相對簡單,主要由組態與調試兩個部分構成:
對于攝像頭和光電圖像來說,就涉及到如何放置攝像頭,如何取合適的圖像視野,如何從對圖像處理得到更有效的車輛真實方向信息(如先對圖像進行失真矯正,然后對矯正...
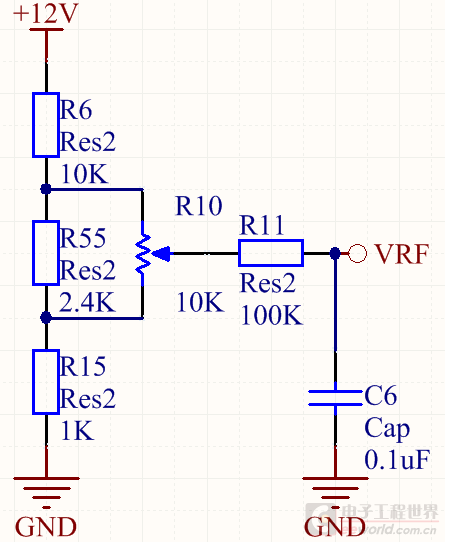
遇到這種情況經典減法電路通常采用兩個運放做輸入級差分后再加一級運放做減法,采用本電路后可減少一級運放具有一定的借鑒意義。
德力西變頻器EM60是一款廣泛應用于工業自動化領域的高性能變頻器。它具有多種功能和特點,可以滿足不同行業和應用場景的需求。在本文中,我們將詳細介紹如何使...
伺服電機轉速不穩定的問題,通常涉及多個方面的因素。以下是針對這一問題的詳細分析和解決方法: 一、原因分析 (1)電機本身問題: 轉子失衡:電機轉子不平衡...
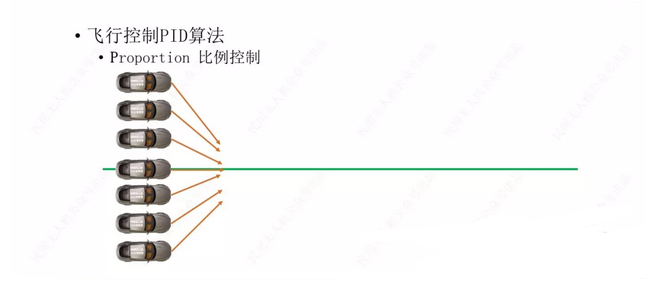
PID控制器是一種線性控制器,它主要根據給定值和實際輸出值構成控制偏差,然后利用偏差給出合理的控制量,目前,人們通過科學研究獲得了諸多具有優異控制效果的...
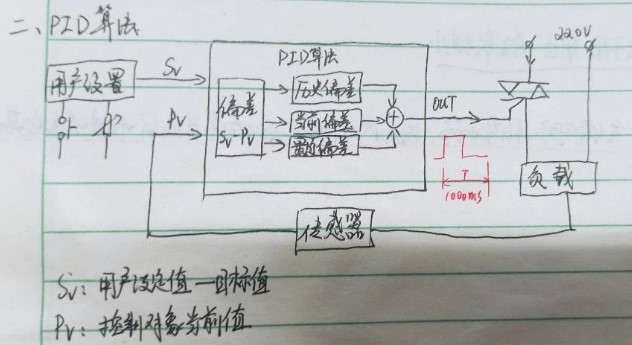
過去都是采用位式(兩位式‘開關量’)控制方法,即位式控制算法只有兩種輸出信號(H/L),即開或關、0或1。且位式控制只考察控制對象當前的狀態量,而對...
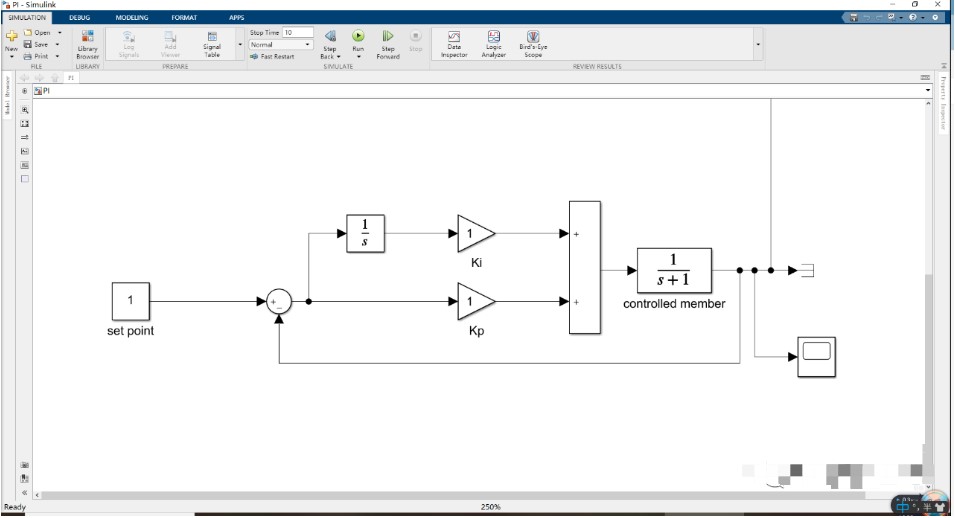
在上一章的內容中說到了PID的由來以及kp的作用和缺陷,由此引出了ki的出現。為了消除控制對象在PID控制中出現的靜態誤差,我們通常采用再加誤差的積分。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1