完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > i2c
I2C總線是由Philips公司開(kāi)發(fā)的一種簡(jiǎn)單、雙向二線制同步串行總線。它只需要兩根線即可在連接于總線上的器件之間傳送信息。
文章:533個(gè) 瀏覽:126767次 帖子:2123個(gè)
I2C子系統(tǒng)幾個(gè)主要的結(jié)構(gòu)體
I2C Data Structure 我們要搞懂一個(gè) Linux 子系統(tǒng),必須研究它的數(shù)據(jù)結(jié)構(gòu),搞懂每個(gè)結(jié)構(gòu)體存儲(chǔ)了什么東西,才能梳理清楚該子系統(tǒng)的架構(gòu)...
2023-07-22 標(biāo)簽:I2C結(jié)構(gòu)體系統(tǒng) 1067 0
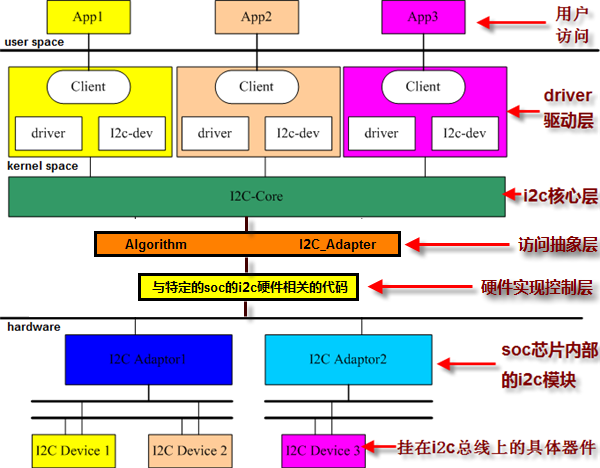
I2C SW Architecture 【driver 驅(qū)動(dòng)層】由普通驅(qū)動(dòng)工程師負(fù)責(zé),【i2c 核心層】由 Linux 提供,【i2c 核心層】以下由芯...
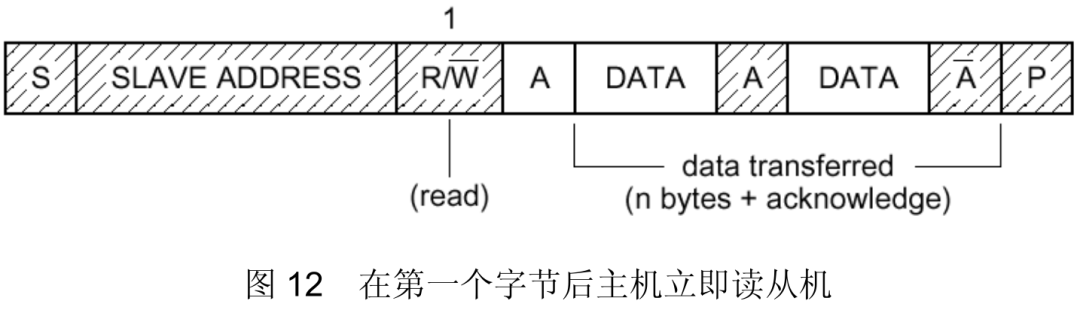
I2C 讀 I2C 先寫后讀 其實(shí)所謂的 I2C 讀,都是先寫后讀。 I2C spec 規(guī)定如下 詳細(xì)解析如下(詳細(xì)看圖) 對(duì)從機(jī)進(jìn)行讀操作時(shí),主設(shè)備發(fā)...
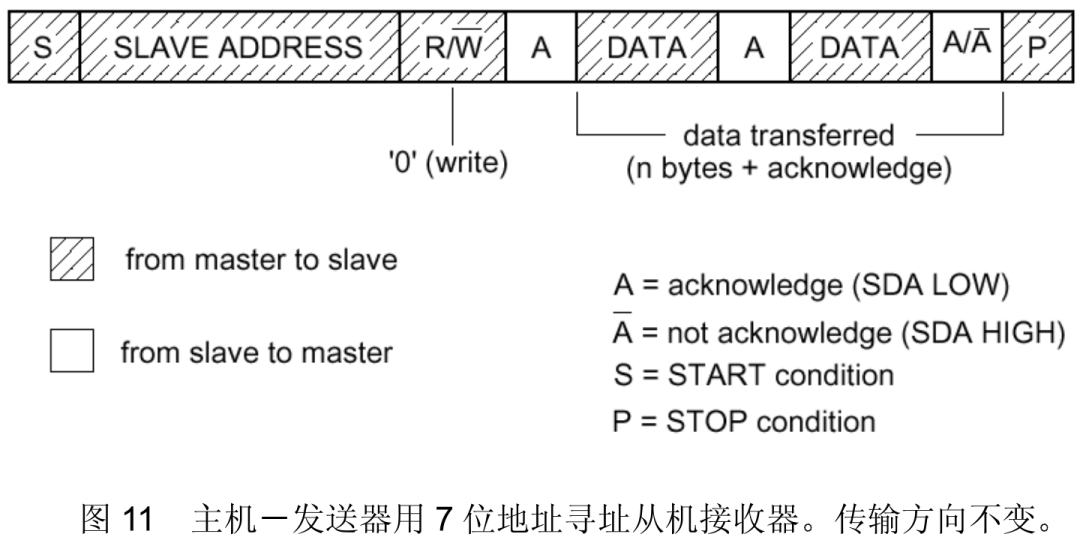
I2C 寫 I2C spec 規(guī)定如下 詳細(xì)解析如下 對(duì)從機(jī)進(jìn)行寫操作時(shí),主設(shè)備發(fā)出開(kāi)始標(biāo)志 (S) 和寫地址 (從機(jī)地址加一個(gè) R/W 位,1 為讀,...
2023-07-22 標(biāo)簽:數(shù)據(jù)I2C 1683 0
I2C設(shè)備驅(qū)動(dòng)的兩個(gè)數(shù)據(jù)結(jié)構(gòu)
設(shè)備驅(qū)動(dòng) I2C 設(shè)備驅(qū)動(dòng)重點(diǎn)關(guān)注兩個(gè)數(shù)據(jù)結(jié)構(gòu):i2c_client 和 i2c_driver。i2c_client 就是描述設(shè)備信息的,i2c_dri...
2023-07-22 標(biāo)簽:驅(qū)動(dòng)I2C數(shù)據(jù)結(jié)構(gòu) 1042 0
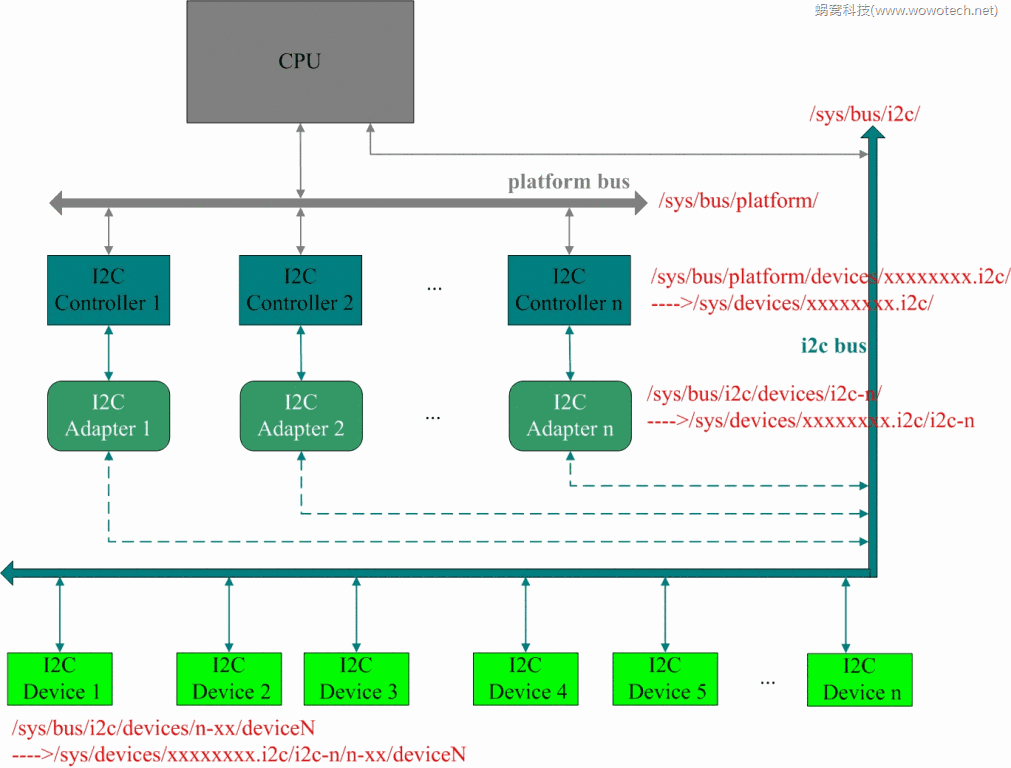
節(jié)點(diǎn)創(chuàng)建 i2c_add_adapter、i2c_add_numbered_adapter 是注冊(cè) i2c_adapter,這兩個(gè) API 最終是調(diào)用 ...
2023-07-22 標(biāo)簽:控制器節(jié)點(diǎn)I2C 904 0
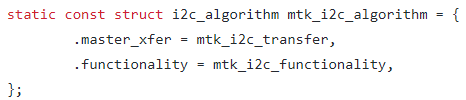
控制器驅(qū)動(dòng) I2C 總線驅(qū)動(dòng)重點(diǎn)是 I2C 適配器驅(qū)動(dòng),這里要用到兩個(gè)重要的數(shù)據(jù)結(jié)構(gòu):i2c_adapter 和 i2c_algorithm。其中,Li...
2023-07-22 標(biāo)簽:控制器驅(qū)動(dòng)I2C 1809 0
/kernel-5.10/drivers/i2c/i2c-core-base.c 是 I2C 的核心部分,I2C 核心提供了一些與具體硬件無(wú)關(guān)的 API...
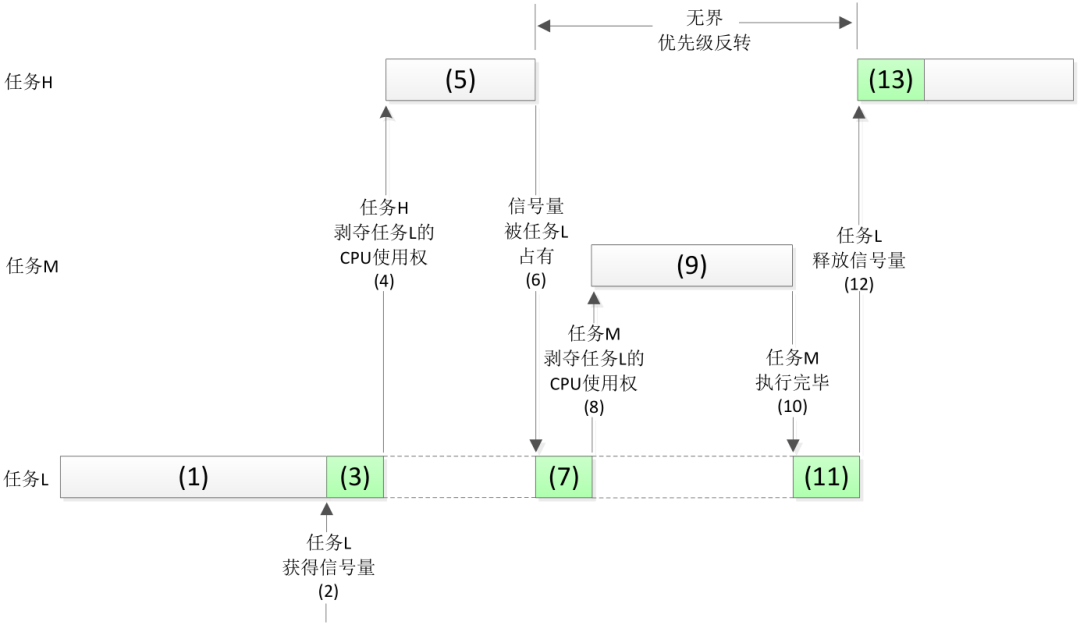
I2C子系統(tǒng)優(yōu)先級(jí)翻轉(zhuǎn)與優(yōu)先級(jí)繼承
優(yōu)先級(jí)翻轉(zhuǎn)與優(yōu)先級(jí)繼承 優(yōu)先級(jí)翻轉(zhuǎn)在可剝奪內(nèi)核中是非常常見(jiàn)的,例子如下(H:High、M:Middle、L:Low) 任務(wù) H 和任務(wù) M 處于掛起狀態(tài)...

I2C數(shù)據(jù)傳輸?shù)娜齻€(gè)主要API
I2C Data Transfer I2C 數(shù)據(jù)傳輸主要有三個(gè) API int i2c_master_send(const struct i2c_cli...
2023-07-22 標(biāo)簽:數(shù)據(jù)傳輸APII2C 1763 0
RK 平臺(tái) I2C debug 1、I2C 通信失敗,出現(xiàn) log: “timeout, ipd: 0x00, state: 1” 請(qǐng)檢查硬件上拉是否給...
I2C子系統(tǒng)debug的常見(jiàn)問(wèn)題
常見(jiàn)問(wèn)題 1、同一條 i2c bus 上所有的外設(shè)的 i2c addr 要不同 1)相同 address 注冊(cè)時(shí)沖突 [ 2.059184 ][xxx]...
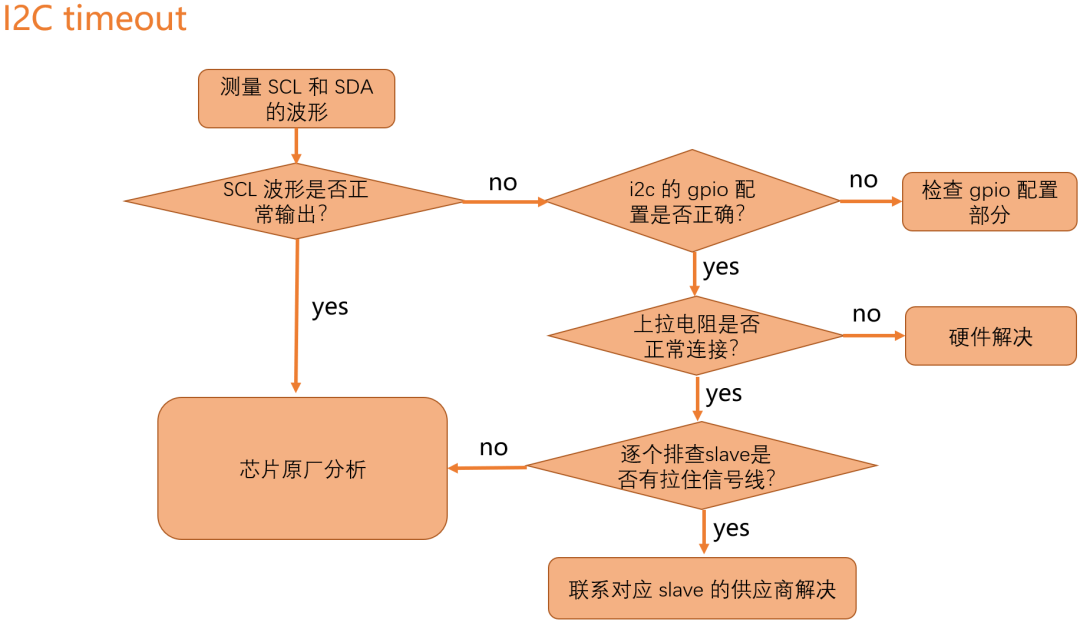
I2C timeout 當(dāng) I2C 傳輸發(fā)生 timeout 時(shí),一般 kernel log 會(huì)有類似如下打印: [48.197718][xxx]i2c...
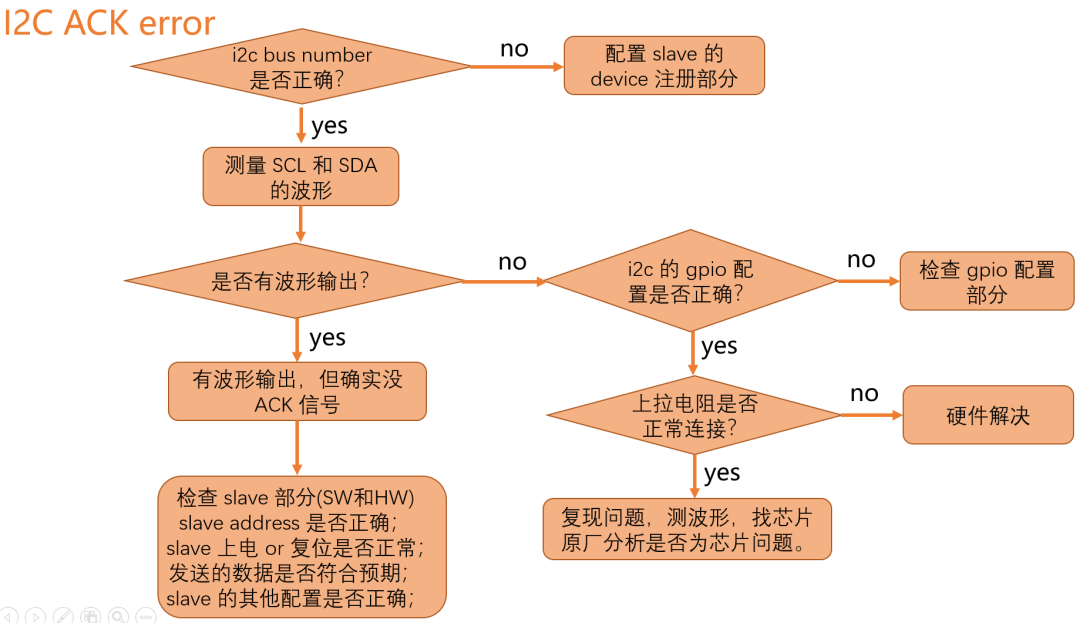
在應(yīng)該收到 ACK 信號(hào)的時(shí)候沒(méi)有收到 ACK 信號(hào),i2c controller 就會(huì)產(chǎn)生一個(gè) ACK error 的中斷,告訴 i2cdriver ...

抓 i2c trace adb rootecho nop > /sys/ kernel/debug/tracing/current_tracer //清...
最近遇到 i2c 傳輸慢的問(wèn)題,正常一筆 i2c 傳輸 52 bytes 應(yīng)該在 1ms 內(nèi)返回,但是偶爾出現(xiàn) 6 ~ 7ms 才返回,不滿足要求,因此...
Milk-V Duo開(kāi)發(fā)板免費(fèi)體驗(yàn) I2C分析
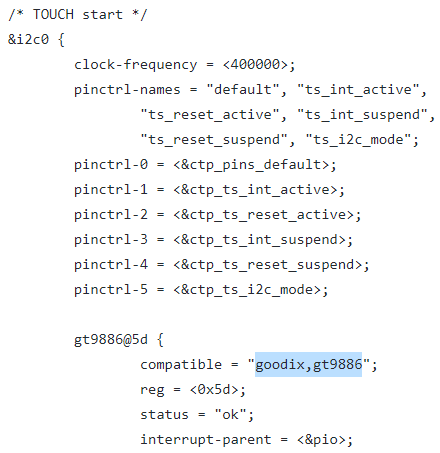
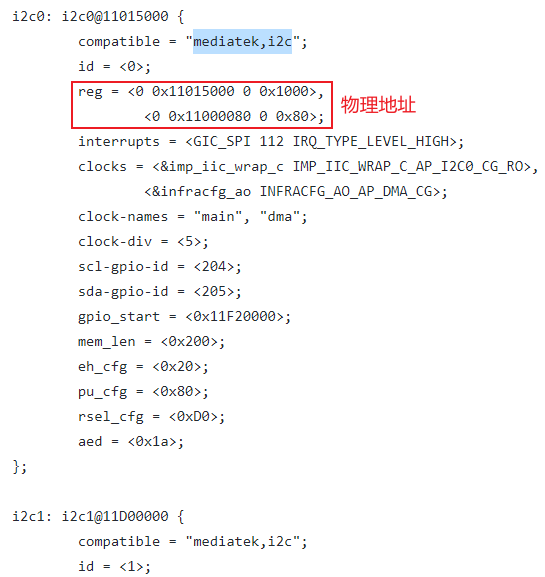
I2C需要分兩部分進(jìn)行修改,第一部分是設(shè)備樹(shù)的配置,這部分主要是有關(guān)I2C控制器相關(guān)的參數(shù)、中斷等,另一部分是硬件引腳的配置,由于驅(qū)動(dòng)用的是i2c-de...

使用第三方開(kāi)源庫(kù)驅(qū)動(dòng)OLED模塊
你好,我是愛(ài)吃魚(yú)香ROS的小魚(yú)。本節(jié)我們繼續(xù)嘗試使用開(kāi)源庫(kù),驅(qū)動(dòng)OLED模塊,最后的效果實(shí)現(xiàn)在OLED上顯示當(dāng)前的角度信息。
使用第三方開(kāi)源庫(kù)驅(qū)動(dòng)MPU6050模塊
你好,我是愛(ài)吃魚(yú)香ROS的小魚(yú)。上一節(jié)我們安裝好了MPU6050的三方庫(kù),這一節(jié)我們嘗試使用該庫(kù)將我們板子上的IMU模塊驅(qū)動(dòng)起來(lái)。
2023-07-13 標(biāo)簽:傳感器I2C學(xué)習(xí)板 2987 0
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語(yǔ)言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無(wú)刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺(jué) | 無(wú)人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹(shù)莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1