完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 深度學習
文章:4733個 瀏覽:122793次 帖子:173個
機器視覺目標識別方法解析:Blob分析法、模板匹配法、深度學習法
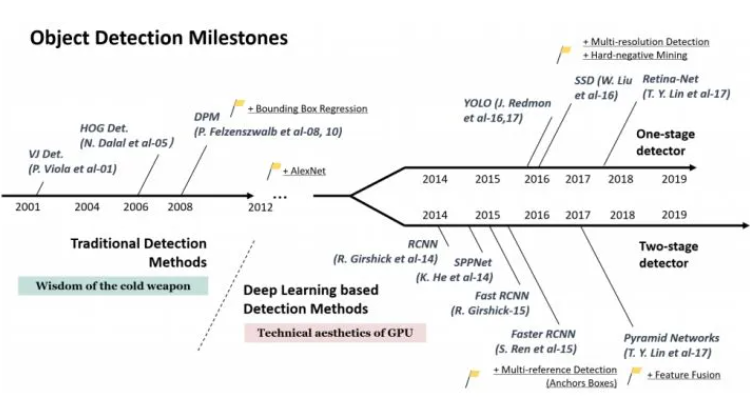
一階算法在整個卷積網(wǎng)絡中進行特征提取、目標分類和位置回歸,通過一次反向計算得到目標位置和類別,在識別精度稍弱于兩階段目標檢測算法的前提下,速度有了極大的提升。
2023-01-10 標簽:機器視覺深度學習卷積網(wǎng)絡 6778 0
本節(jié)主要將近年來基于候選區(qū)域的目標檢測算法分為五個部分進行綜述,首先介紹了Faster R-CNN[14]框架的發(fā)展歷程,然后綜述了對Faster R-...
2023-01-09 標簽:計算機視覺深度學習卷積神經(jīng)網(wǎng)絡 1468 0
人工智能對人類生活和經(jīng)濟的影響是驚人的。到2030年,人工智能可以為世界經(jīng)濟增加約15.7萬億美元。
深度學習有哪些trick?提升performance的利器有哪些?
abel smoothing將hard label轉變成soft label,使網(wǎng)絡優(yōu)化更加平滑。標簽平滑是用于深度神經(jīng)網(wǎng)絡(DNN)的有效正則化工具,...
2023-01-26 標簽:神經(jīng)網(wǎng)絡深度學習 911 0
本文將討論目標檢測的基本方法(窮盡搜索、R-CNN、Fast R-CNN和Faster R-CNN),并嘗試理解每個模型的技術細節(jié)。為了讓經(jīng)驗水平各不相...
2023-01-05 標簽:深度學習 584 0
將該框架推廣到廣義零樣本學習,并針對域偏置問題,提出了- -種基于語義知識的域檢測方法。利用域檢測方法可以先將未見類別和已見類別進行區(qū)分,然后用兩個模型...
在設置生物識別設備時,算法會采集一個人的多個身份樣本,如面部圖像或指紋,并將其記錄到設備中。當使用生物特征來解鎖設備時,它需要實時樣本來與設備上的日志進...
超異構芯片是具有高水平的系統(tǒng)集成,以實現(xiàn)先進汽車的可擴展性和更低成本的支持集中式 ECU。關鍵核心包括具有標量和矢量內核的下一代 DSP,專用深度學習的...
Teachable Machine 嵌入式神經(jīng)網(wǎng)絡的做視覺分類技術
本文會帶您完成相關的軟硬件環(huán)境設定,并操作 Teachable Machine 透過相機模塊來搜集照片、訓練神經(jīng)網(wǎng)絡,最后導出檔案給 Arduino ...
2022-12-23 標簽:嵌入式神經(jīng)網(wǎng)絡Arduino 1217 1
深度學習技術應用于目標視覺檢測時存在的困難和挑戰(zhàn)
目標視覺檢測的根本問題是估計特定類型目標出現(xiàn)在圖像中的哪些位置.如圖 1所示, 目標視覺檢測技術在流程上大致分為三個步驟:區(qū)域建議(Region pro...
1965年摩爾定律提出后,我們開始依次進入1965-2005年的單核CPU時代;2006至如今的多核CPU時代;2012至如今的多核英特爾MIC時代。
有了深度學習,可以根據(jù)3-D的ground truth來訓練NN模型,得到3D大小和姿態(tài)估計,距離是基于平行線原理(single view metrol...
基于端到端的單噪聲圖像降噪和校正網(wǎng)絡實現(xiàn)高質量的車牌識別
在本文中,我們提出了一種用于從真實世界中的低質量圖像中進行車牌識別的算法。我們的算法建立在降噪和校正的框架上,并且每個任務都是由卷積神經(jīng)網(wǎng)絡來執(zhí)行。在先...
在信息時代,光子和電子是信息傳輸?shù)闹饕d體。與微電子學中的摩爾定律不同,集成光子器件的密度主要受光波長或衍射極限的限制。
訓練數(shù)據(jù)采用的是用PS調整過的高質量圖像和對應的合成低光照圖像(隨機減少亮度、對比度,伽馬校正)。損失函數(shù)為帶正則項的誤差矩陣的F-范數(shù)平方,即誤差平方和。
2022-12-07 標簽:成像系統(tǒng)深度學習 1187 0
目標檢測定義,識別圖片中有哪些物體以及物體的位置(坐標位置)。其中,需要識別哪些物體是人為設定限制的,僅識別需要檢測的物體
一種新神經(jīng)網(wǎng)絡或將啟動第三次人工智能浪潮
Hinton 表示,這種設計要求意味著數(shù)字計算機已經(jīng)錯過了「硬件的各種可變、隨機、不穩(wěn)定、模擬和不可靠特性」,而這些特性可能對我們非常有用。
2022-12-05 標簽:神經(jīng)網(wǎng)絡人工智能深度學習 456 0
為什么不同模態(tài)的embedding在表征空間中形成不同的簇
文中將一些經(jīng)典的多模態(tài)對比學習模型中兩個模態(tài)的embedding,通過降維等方法映射到二維坐標系中。
為驗證本文算法對不同大小目標的檢測精度, 實驗中隨機選取100張圖片, 其中包含198個目標, 將其分為大、中、小三類. 由于該網(wǎng)絡的輸入圖像尺寸為30...
計算成像能力通常體現(xiàn)在攝像機的核心處理器的ISP(Image Signal Processing)能力上,通過算力換圖像等方式提升攝像機對圖像的處理能力...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術 | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術開發(fā)區(qū)航空路6號手機智能終端產業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1

