完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 波特率
文章:164個 瀏覽:34686次 帖子:550個
CAN轉(zhuǎn)RS-232網(wǎng)關(guān)的參數(shù)介紹
波特率(Baud Rate):波特率是指數(shù)據(jù)傳輸?shù)乃俾剩硎久棵雮鬏數(shù)奈粩?shù)。CAN總線和RS-232總線都有自己的波特率范圍,因此需要將CAN轉(zhuǎn)RS-2...
2024-01-18 標(biāo)簽:CAN網(wǎng)關(guān)總線 1072 0
以太網(wǎng)CAN轉(zhuǎn)換器波特率的設(shè)置步驟是怎樣的?
確定CAN總線的波特率:首先,需要確定所連接的CAN總線的波特率。CAN總線的波特率通常以位/秒(bps)為單位,用于確定數(shù)據(jù)傳輸速度。
2024-01-17 標(biāo)簽:轉(zhuǎn)換器以太網(wǎng)CAN總線 1342 0

STM32F407IGT6 嵌入式開發(fā)平臺采用 TJA1050 作為CAN 收發(fā)器,該收發(fā)器完全兼容ISO11898標(biāo)準(zhǔn),最高速度可達1 Mb/s,此外...
2023-12-26 標(biāo)簽:CAN總線網(wǎng)絡(luò)通信 2552 1

求一種CAN總線波特率的自適應(yīng)算法設(shè)計方案
CAN 總線是目前應(yīng)用十分廣泛的現(xiàn)場總線,其僅通過一對差分信號線即可實現(xiàn)網(wǎng)絡(luò)中各節(jié)點之間的互聯(lián)和信息交互
高階調(diào)制(High Order Modulation),是一種通過讓一個碼元攜帶更多的比特信息,來實現(xiàn)在有限的頻譜帶寬內(nèi),傳輸更多信息的數(shù)字調(diào)制技術(shù)。
2023-12-05 標(biāo)簽:無線通信數(shù)字調(diào)制頻譜 3712 0
一次只能傳輸一行數(shù)據(jù),使用串行通信一次只能傳輸一位。一個字節(jié)必須傳輸八次才能被接收。串行通信是指通過單根導(dǎo)線傳輸數(shù)據(jù)字符串,這就是它被稱為串行端口的原因。
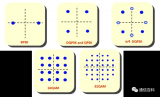
在模擬調(diào)制中,載波參量的改變是按連續(xù)的模擬信息。在數(shù)字調(diào)制中,這些載波參數(shù)(幅度,頻率和相位)的變化由離散的數(shù)字信號決定。從這個意義上講,數(shù)字調(diào)制和模擬...
2023-11-15 標(biāo)簽:通信系統(tǒng)數(shù)字調(diào)制波特率 2945 0
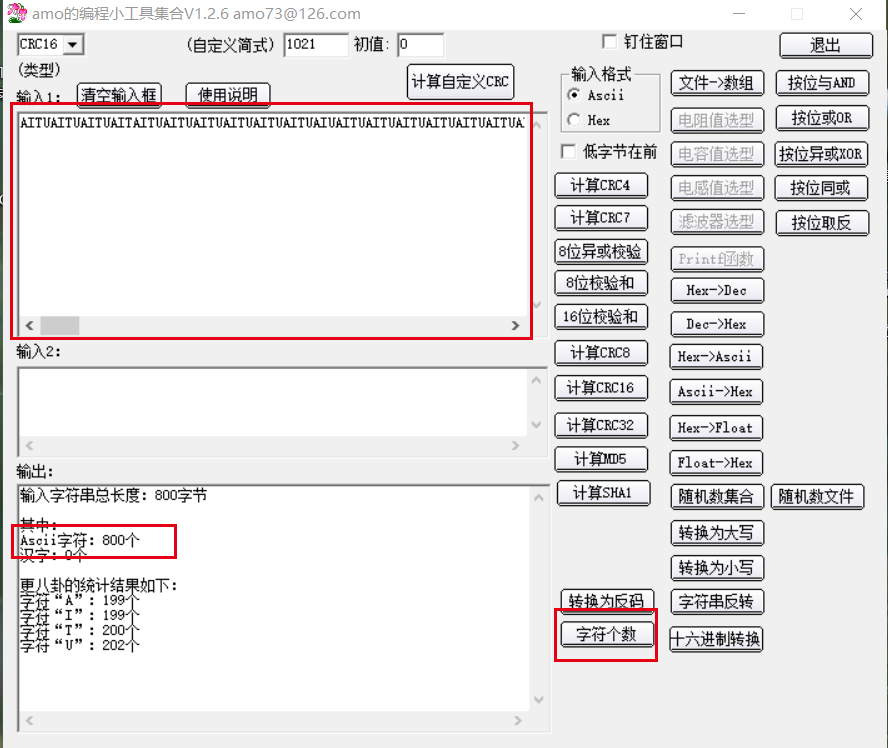
在115200波特率下想發(fā)送800個字符需要多少時間呢?
大家考慮一下,平時大家串口發(fā)送字符用到的波特率,有沒有去想過**波特率和發(fā)送時間的關(guān)系**呢?最近項目里面發(fā)送數(shù)據(jù)因為要按照HL7標(biāo)準(zhǔn),因此發(fā)送字符數(shù)到...
2023-10-26 標(biāo)簽:波特率串口數(shù)據(jù)邏輯分析儀 1.0萬 0

使用Console通信電纜連接交換機與PC,這個一般購買設(shè)備時是自帶的,若PC電腦無串口,需要使用串口轉(zhuǎn)usb口的轉(zhuǎn)接線。
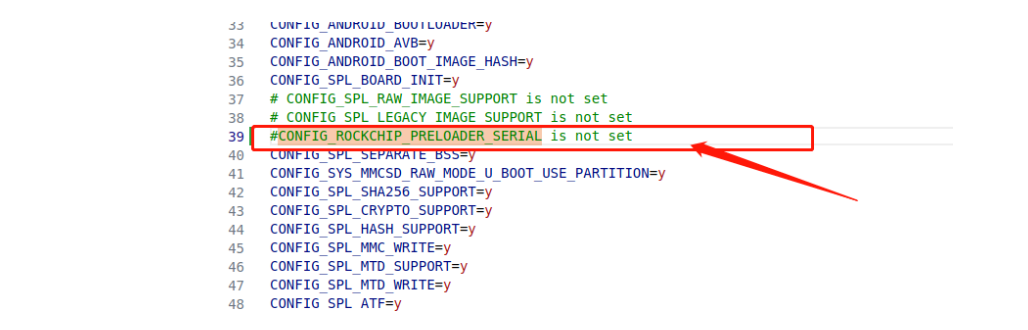
打開 u-boot/configs/rk3568_defconfig 文件,禁用CONFIG_ROCKCHIP_PRELOADER_SERIAL配置若沒...

串口是串行接口的簡稱,串行接口是采用串行通信方式的接口。串行通信是一種將需要傳輸?shù)臄?shù)據(jù)由低位到高位一位一位地在一條傳輸線上逐個傳輸?shù)耐ㄐ欧绞健?/p>
假如要測量的波特率為9600, 則每一比特位的時間為:1/9600 ≈ 104 μs,一般示波器橫向上每個大格子里5個小格子,要想看清一比特位一般需要一...
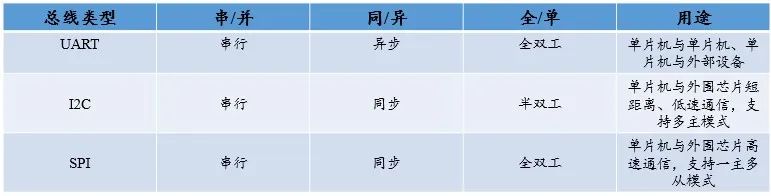
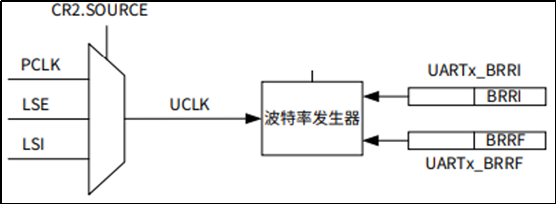
UART(Universal Asynchronous Receiver Transmitter)通用異步收發(fā)器,是一種通用串行、異步通信總線,該總線有...
串口傳輸速率低于波特率怎么辦 串口通信的波特率如何設(shè)置
如果串口傳輸速率低于波特率,您可以嘗試以下方法來解決問題: 1. 檢查硬件連接:確保串口連接正確且牢固。檢查連接線是否完好,確保沒有松動或斷開的接...
串口傳輸?shù)氖鞘裁葱盘?串口接收到的數(shù)據(jù)怎么解讀出來
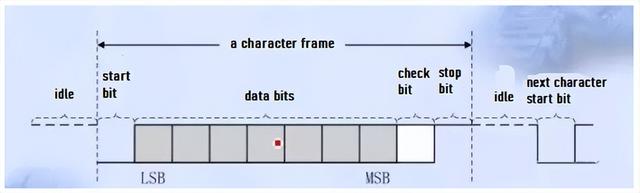
串口通信采用的是串行傳輸方式,即逐位地傳輸數(shù)據(jù)。數(shù)據(jù)按照特定的格式和規(guī)則被分為連續(xù)的位序列,并通過TX線傳輸給外部設(shè)備。外部設(shè)備通過RX線接收到位序列...
數(shù)據(jù)傳輸錯誤:低于波特率的傳輸速率可能導(dǎo)致數(shù)據(jù)傳輸錯誤。由于數(shù)據(jù)在傳輸過程中受到時鐘同步和波特率控制的影響,如果傳輸速率低于預(yù)期的波特率,可能會導(dǎo)致數(shù)據(jù)...
dcdc模塊可以反向嗎 dcdc模塊可以并聯(lián)嗎 dcdc模塊可以抗干擾嗎
DC-DC模塊可以將輸入的直流電壓轉(zhuǎn)換為較高或較低的輸出直流電壓。例如,它可以將電池供電的低電壓轉(zhuǎn)換為適合電子設(shè)備工作的較高電壓,或?qū)⒏唠妷恨D(zhuǎn)換為較低電...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1