完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 機器人
機器人(Robot)是自動執行工作的機器裝置。它既可以接受人類指揮,又可以運行預先編排的程序,也可以根據以人工智能技術制定的原則綱領行動。它的任務是協助或取代人類工作的工作,例如生產業、建筑業,或是危險的工作。
文章:25643個 瀏覽:212523次 帖子:1482個
隨著科學技術的不斷發展,機器人技術在航天、海洋、軍事、建筑、交通、工業及服務業等領域已經取得廣泛的應用和發展。而在一些特殊場合(如航天、深海作業及核工業...
什么是BLDC電機?它有什么作用?隨著全球工業自動化、智能化和人們生活水平的提高,電機在汽車、家用電器、電子音像、信息處理設備,以及工業自動化等領域的應...
碼垛是機器人最常用的功能之一,與其他多數機器人不同,ABB沒有碼垛包,但實現起來也很簡單,也甚至可以實現復雜碼垛情況。
自動焊錫機在使用過程中有時候會出現發黑的一些情況,往往很多人不重視,導致對焊線的效率還是有一定影響的。這是什么原因造成的呢?
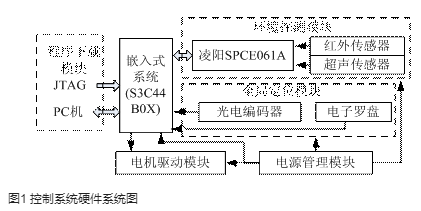
基于S3C44B0X芯片和SPCE061A單片機實現移動機器人的設計
移動機器人利用導航技術,獲得機器人的目前所處的位置,結合傳感器技術對周圍外界環境(障礙物等)作實時探測,并根據環境提供的信息規劃一條可行路徑完成達到目標...

基于Windows系統和TMS320F2812處理器實現彈性單腿機器人的控制設計
本文所研究的是一種新型彈性單腿機器人,該機器人采用雙臂驅動,彈性伸縮腿中不安裝驅動部件,系統依靠內部動力學耦合實現動態站立平衡、起跳和穩定連續跳躍。其機...
視覺是人類認識世界的最重要的手段之一,人類獲取的信息百分之八十以上都是通過視覺得到的。隨著計算機技術、傳感器技術的發展,使用攝像機與計算機模擬并實現部分...
1 實現的功能,及應用的場合 1.1 學習機器人的前提條件 學習該內容前須掌握以下的幾個知識點: 西門子S7-1500 PLC的基本知識包括西門子系列P...
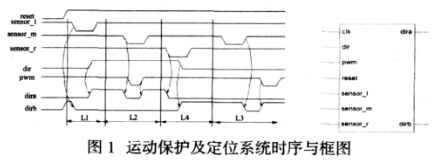
基于CPLD器件XC9572實現巡線機器人運動控制系統的軟硬件設計
就巡線機器人的運動控制系統中的保護及定位系統而言,其本質是根據傳感器信號給出相應的電機控制信號。也就是說,電機保護及定位系統完成控制輸入(傳感器信號)到...
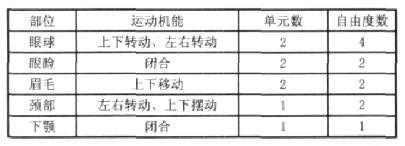
基于PC及和PIC16F877芯片實現情感表情機器人的研究與設計
十多年前“詭異谷”的理論制約了類人機器人的發展,但隨著科技的發展,人們再次把關注的眼光投向了“更像人類的機器人”身上,機器人博覽會上的saya已經到了以...
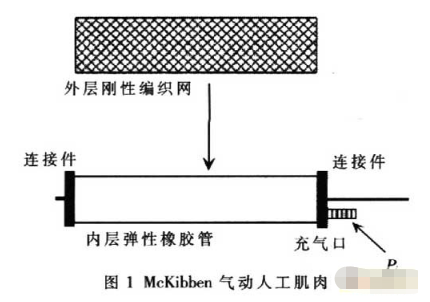
基于McKibben型氣動人工肌肉實現構建機器人關節控制的軟硬件系統
由于氣動人工肌肉只能提供單向驅動力,故需由兩條肌肉以類似生物頡頏肌的方式構成對抗性回轉關節以實現操作臂的力閉合。本文利用McKibben氣動人工肌肉作為...
采用單片機C8051F047和H橋組件LMD18200T實現巡線機器人控制系統設計
高壓輸電線及桿塔附件長期暴露在野外,因受到持續的機械張力、電氣閃絡、材料老化的影響而產生斷股、磨損、腐蝕等損傷,如不及時修復更換,原本微小的破損和缺陷就...
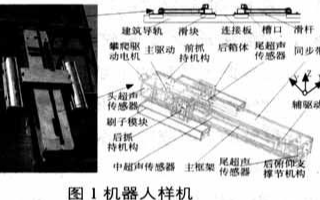
劇院主體外形呈半橢球形,外墻由玻璃和鈦合金板覆蓋,總表面面積達到36000m2。大劇院上鈦板分為7種規格,寬度從2.2m到1.5m不等。沿球面緯線方向各...
采用電磁吸附技術和LG911驅動芯片實現微小爬壁機器人的設計
本文介紹的磁驅動微小爬壁機器人,采用電磁吸附技術,尺蠖運動原理,具有結構簡單、重量輕、加工制作容易、控制靈活、控制電路簡單、轉彎速度快等特點。
機器人舞蹈比賽是一項具有極強觀賞性和趣味性的比賽。比賽規則要求參賽機器人在有限的場地和時間內,配合音樂完成動作。由于要求機器人既要充分利用場地,又不能超...
將激光機器人系統應用于液壓成型密閉管的切割,可有效解決對其進行單側切割出現的問題,并可使用戶在成型工件上進行切割。不僅如此,選擇到合適的系統,還可使運行...
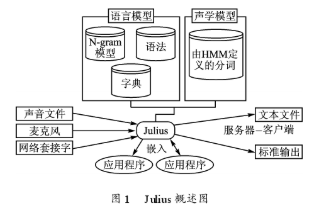
基于JuliUS語音識別引擎實現機器人孤立詞語音識別系統的設計
語音識別系統是一種模式識別系統,系統首先對語音信號進行分析,得到語音的特征參數,然后對這些參數進行處理,形成標準的模板。這個過程稱為訓練或學習。當有測試...
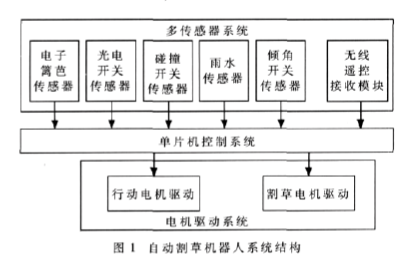
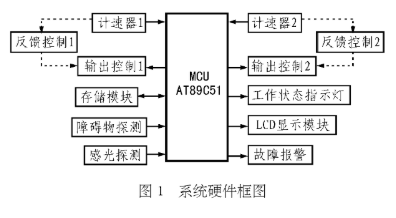
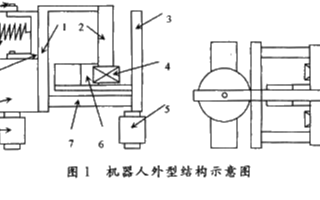
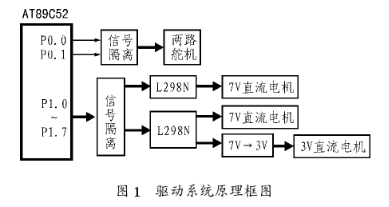
采用STC12C5410AD處理器實現自動割草機器人主控系統的設計
自動割草機器人主控系統的結構框圖如圖1所示。系統主要由單片機控制系統、傳感器系統、電機驅動系統3大部分組成。其中單片機控制系統的處理器采用國產芯片STC...
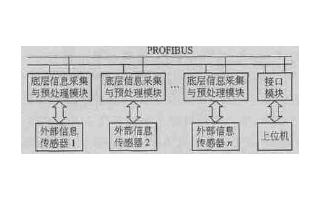
采用PC/104總線和CAN總線實現對力信息實時采集和傳送的系統設計
在國家863計劃支持下,國防科技大學機器人實驗室于2003年研制出一臺新型仿人機器人;同時與合肥智能機械研究所合作,在該機器人腳掌上安裝了可檢測地面反力...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1


