在研究機器視覺的移動機器人導航技術的基礎上,基于層次結構,簡單介紹導覽機器人控制系統的總體方案及軟硬件設計。采用圖像處理中的邊緣檢測和模板匹配方式進行機器人的視覺導航,使機器人在結構化道路環境下能夠自動躲避障礙物,停靠到目標點,并能向參訪者導覽解說,最后驗證了該系統的有效性和優越性。
2018-12-07 08:08:00 6582
6582 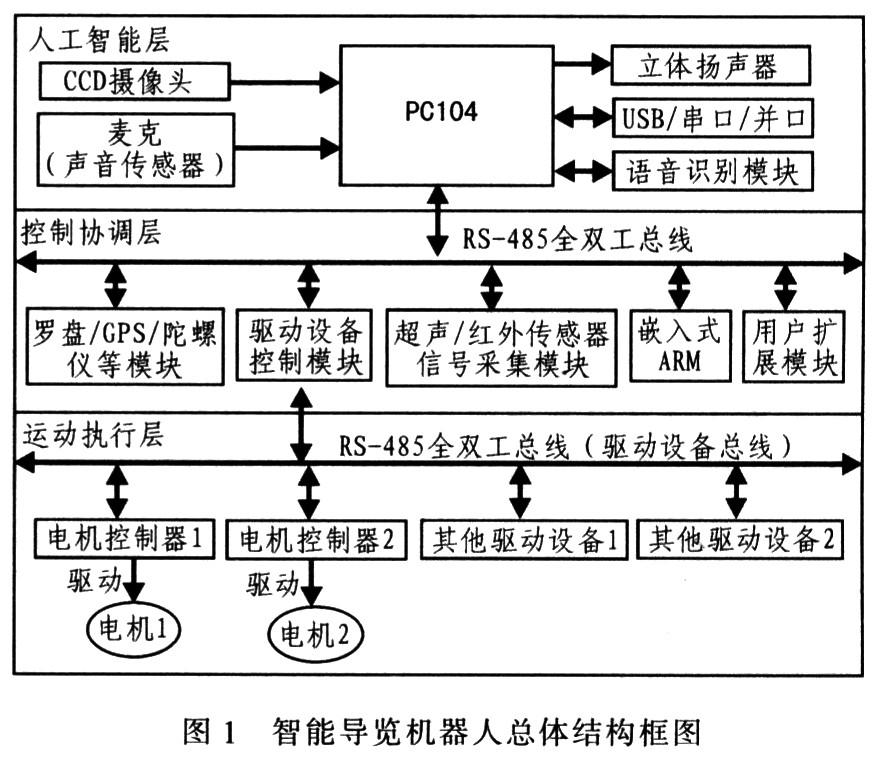
對實現下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環境傳感器和電源管理傳感器。
2020-12-07 07:04:36
據麥姆斯咨詢介紹,控制和通信IC的發展在實現下一代的機器人中起到重要作用。然而,這些復雜的現代機器人的核心是許多新的、小型化和低成本的傳感技術的出現與融合。對實現下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環境傳感器和電源管理傳感器。
2020-08-18 06:41:14
,就能依靠經驗,學習到很多更好的作業方法,并且熟練掌握。 機器人傳感器可分為機器人內部傳感器和機器人外部傳感器兩種。機器人內部傳感器的功能是測量運動學和動力學參數,其提供信息的目的是控制機器人按規定
2018-01-03 17:09:03
一般機器人系統由機械手、環境、任務和控制器四個互相作用的部分組成。我們稱一般安裝在機器人機械手上的傳感器為內傳感器(Inner Sensons),而稱作為環境的一部分的傳感器為外傳感器
2021-09-16 08:45:39
隨著智能化的程度提高,機器人傳感器應用越來越多。智能機器人主要有交互機器人、傳感機器人和自主機器人3種。從擬人功能出發,視覺、力覺、觸覺最為重要,早已進入實用階段,聽覺也有較大進展,其它還有嗅覺
2021-09-16 09:05:02
傳感產業也形成了生產和科研力量。 機器人的控制系統相當于人類大腦,執行機構相當于人類四肢,傳感器相當于人類的五官。因此,要讓機器人像人一樣接收和處理外界信息,機器人傳感器技術是機器人智能化的重要體現
2018-11-08 15:55:32
機器人傳感器技術使用毫米波傳感器測量對地速度使用毫米波傳感器映射和導航
2021-03-18 07:00:30
,不然現在控制器的功耗都不是很大,所以,稍微大一點的機器人都會有足夠的電源供應的。 2,傳感器:傳感器,是機器人和現實世界之間的紐帶。但就目前傳感器技術而言,我們現在所能選用的傳感器或者說負擔的起
2015-01-16 17:21:37
1、機器人的控制系統“控制”的目的是使被控對象產生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質”是對驅動器輸出力矩的控制。2、機器人示教原理機器人的基本工作原理是示教
2021-09-13 08:40:55
小弟最近設計了一個簡易機器人。對于這個傳感器 不太好選擇啊。是選單色呢?還是RGB?
2015-01-19 10:11:11
傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一定的作業功能,是因為它能夠通過傳感器感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿人機器人
2019-09-18 06:17:46
文中提出的TMS320DM6437+TMS320F28015的軟硬件設計方案在新型球形機器人控制系統中得到初步應用,驗證了理論設計的可行性和可靠性,實驗結果表明接口數據讀寫高效可靠。本設計對以后其他雙核控制系統接口的設計與研究工作具有很好的參考價值。
2021-05-27 06:46:44
所需要的控制命令。根據以上理論我初步實現了基于Kinect體感控制的遠程隨動機器人控制系統,機器人可以忠實映射人體動作(見圖3)。 本機器人控制系統基于Kinect體感傳感器設計,由人體發出命令,經過
2016-09-26 11:01:51
Robotics 2009提供了豐富的機器人函數庫,可以連接標準機器人傳感器和執行機構,集成了智能操作和感知的基礎算法,并且包含機器人和自主式車輛的運動控制函數。利用這一新軟件,工程師和科學家能夠更快
2019-05-21 07:40:08
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
自動或半自動機器人常常需要嵌入式控制系統,從而能夠結合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執行器上。NI提供了多種嵌入式硬件平臺,以滿足復雜系統的需求。從尖端的機器人研究項目直至高級行業應用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
無論是傳統的工業機器人系統,還是當今最先進的協作機器人(Cobot),它們都要依靠可生成大量高度可變數據的傳感器。這些數據有助于構建更佳的機器學習(ML)和人工智能(AI)模型。而機器人依靠這些模型變得“自主”,可在動態的現實環境中做出實時決策和導航。
2020-08-05 07:08:21
:設計一種基于ARM的智能清潔機器人控制系統。機器人能對未知的室內環境進行全面清掃具備避障和臺階檢測功能能實現電量管理自動返回充電。內容包括:1、基于單片機對直流電機的啟動、轉向、轉速、正反轉程序
2015-07-06 10:59:02
機器人的動作流程
三、草莓采摘機器人的控制系統設計
1、硬件部分介紹
草莓采摘機器人設計的硬件控制系統框圖如圖2.1所示,包括核心控制單元、傳感器、驅動器等。核心控制單元包括單片機和樹莓派,樹莓派
2023-08-16 17:35:54
公司都是采用CAN總線實現電機驅動但是目前大多數ARM芯片都不支持CAN總線,偶然機會得知論壇上米爾MYD-Y6ULX開發板采用NXP公司i.MX 6UL/6ULL系列處理器,發現非常適合做復雜機器人
2018-01-22 10:32:40
申請理由:有扎實的基礎,做過《群空調遠程控制系統》、《計算機聯鎖仿真系統軟硬件實現》、《具有通訊協作能力的智能滅火機器人群》等項目,現在在深圳捷順科技做測試工程師項目描述:本項目在軌道創新實驗室兩項
2015-08-11 22:13:51
就是說,一個機器人發指令,一堆機器人向這個機器人靠攏,可以通過zigbee么?或者是別的什么傳感器?先謝過了!
2012-09-26 18:50:15
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
機器人不都是程序所控制的?所有的信號通過傳感器集中到終端通過程序統一處理???
2016-09-20 21:11:47
ROVER C5 V0501 機器人控制系統采用國際流行的開放式軟硬件平臺,配以自主研發的避障控制卡、牽引運動卡及機器人內控專用編碼器和安全接口;
2019-09-12 09:00:12
的實踐經驗,來系統的梳理一下什么是移動機器人軟硬件系統問題。文中涉及到的開源項目網站地址如下:開源項目網站Handsfree
2021-08-06 06:13:07
。智能傳感器網絡化技術致力于研究智能傳感器的網絡通信功能,將傳感器技術,通信技術和計算機技術融合,實現信息的采集、傳輸和處理真正統一和協同。本文研制了一種基于片上系統芯片的傳感器模塊軟硬件設計。
2019-10-10 08:06:59
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-07-05 07:08:47
求大神分享一款不錯的基于CPLD的臭氧電源控制系統的軟硬件設計
2021-04-29 06:45:15
本文以6- PPPS并聯機器人為控制對象,以NI公司的系列軟硬件產品為基礎,依托國家自然基金(No. 30770538)的支持,快速開發了此并聯機器人的開放式數字控制系統。
2021-05-12 06:38:22
一。引言 機器人研究是自動化領域最復雜。最具挑戰性的課題,它集機械。電子。計算機。材料。傳感器。控制技術等多門學科于一體,是多學科高技術成果的集中體現。而仿人步行機器人技術的研究更是處于機器人課題
2020-08-19 06:57:09
協調完成多傳感信息的融合,而運動執行層完成機器人行走。圖1為智能導覽機器人的總體結構框圖。3 導覽機器人硬件設計3.1 人工智能層硬件實現 考慮到移動機器人控制系統要求處理速度快、方便外圍設備擴展
2019-07-04 08:30:00
裝或夾具并改變機器人程序,即可焊接曲線結構工件。工位布局如圖 2 所示。2 電氣控制系統設計焊接系統由庫卡機器人本體、機器人控制器、焊機、PLC、觸摸屏、接觸傳感器及電弧傳感器組成,其框架如圖 3
2018-03-13 09:15:48
感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿人機器人中應用的傳感器種類繁多,例如視覺傳感器、電子羅盤、加速度計和超聲波傳感器等都是仿人機器人中常用的傳感器。DF-1機器人
2019-06-21 07:04:37
處理 機器人控制系統的主要任務是根據傳感器和編碼器等反饋回來的數據,進行清掃路徑規劃,控制清掃、吸塵機構,完成各種控制動作。設計合適的人機接口,在LCD上顯示機器人狀態和運行時間。因此,機器人控制系統
2018-11-06 16:01:27
泛使用的工業標準技術。此外,我們希望找到一個靈活的嵌入式設計平臺,提供軟硬件工具之間的緊密集成性。系統還需要能夠集成各類I/O和傳感器,并且在競賽環境的操作中足夠耐用。參照機器人的復雜特性和較短的開發時間,以上
2019-05-15 09:40:01
、處理傳感器的數據,以便在控制系統的信號綜合中使用; (4)實現機器人步態規劃、運動方程的求解以及控制指令的快速傳輸;(5)具有良好的控制結構和接口,便于高層控制軟件的開發;(6)有一定的預留接口
2019-07-26 08:25:28
研究了一種用FPGA技術實現三輪全方位移動機器人運動控制系統的方法,與雙DSP結構,DSP+CPLD結構,以及DSP+專用集成電路結構等相比,該方法具有簡單可靠,擴展性強等特點。且FPGA設計簡單,使用方便,開發周期短,能夠實現真正的SOPC系統。
2019-10-22 07:35:19
本文概述了上海交通大學機器人研究所研制的新型遙控移動式排爆機器人PBJ-1的嵌入式控制系統固件的情況。利用嵌入式系統技術開發適合排爆等各類遙控地面移動機器人使用的嵌入式控制系統能夠解決上述種種矛盾。
2021-06-07 06:11:02
基于STM32微控制器的掃地機器人控制系統硬件架構設計,有需要的可以下載,詳見附件資料。
2022-03-23 10:49:21
摘要:針對自主移動機器人沿墻導航過程,設計一種收發一體式超聲波傳感器與步進電機組成的探測系統。介紹此系統的結構和軟硬件設計。實驗總結超聲波波束與目標物的入射角大小對測距穩定性的影響,提出搜尋離墻
2018-11-02 16:04:48
實現的。視覺、紅外、激光、超聲波等傳感器都在移動機器人中得到實際應用。超聲波傳感器以其性價比高、硬件實現簡單等優點,在移動機器人感知系統中得到了廣泛的應用。但是超聲波傳感器也存在一定的局限性,主要
2012-01-19 13:45:49
,導航技術,計算機技術,人工智能等多個領域,因而對移動機器人的控制部分提出很高的要求,特別是視覺傳感器的出現,要求控制系統不僅存儲量大,而且處理速度快等。以往基于PLC和單片機控制的移動機器人就不能很好
2020-11-23 15:08:52
的環境狀態中有意義的信息,智能傳感器的使用提高了機器人的機動性,實用性和智能化的水準,人類的感受系統對感知外部世界信息是機器靈巧的,然而,對于一些特許的信息,傳感器比人的系統更加有效。(4)機器人-環境
2016-03-06 12:56:19
樹莓派和其他機器人的控制器有何不同?如何使用樹莓派開發智能機器人控制系統?
2021-12-23 06:55:02
手術機器人系統的工作原理是什么?如何去實現一種基于傳感器的機器人手術系統設計?
2021-09-28 08:46:20
傳感器和驅動器,機械臂也不能正常工作。原因是傳感器輸出的信號沒有起作用,驅動電動機也得不到驅動電壓和電流,所以機器人需要有一個控制器,用硬件坨和軟件組成一個的控制系統。機器人控制系統的功能是接收來自傳感器
2021-07-05 08:01:16
性能與可靠的機械控制性能的同時保證,才能在短時間內準確尋找到火源并滅火回家。在此以ARM9處理器為核心,對基于嵌入式系統的智能滅火機器人進行了設計。本文將從硬件和軟件方面講述智能滅火機器人控制器的實現方法,并且給出了機器人滅火的具體實驗,驗證了方案的可行性,為智能滅火機器人的進一步研究提供了平臺。
2019-07-31 06:23:18
今天,機器人正被應用于那些先前不曾使用機器人的生產領域。針對不同的情況,必須始終分別考慮各個安全方面并針對每種應用實施合適的安全解決方案。安全的傳感器技術舉足輕重:為了滿足所有安全相關的應用,需要采用滿足傳感器需要的模塊化方法。
2020-05-07 08:16:08
電視攝像機、三角測距儀、碰撞傳感器、驅動電機以及編碼器,并通過無線通訊系統由二臺計算機控制,可以進行簡單的自主導航。
2020-05-14 08:15:00
移動機器人是一種能夠感知外部環境,在有障礙物的環境中能夠實現動態決策與規劃,從而完成避障等多種功能的綜合系統。機器人系統通常分為機構本體和控制系統兩部分,控制系統的作用是根據用戶的指令對機構本體進行
2020-03-06 07:07:07
根據通用主動視覺系統的設計要求,提出了基于DSP的嵌入式主動視覺系統的設計方案,并完成系統的軟硬件設計。最終實現的系統具有俯仰和搖擺2個自由度、支持雙CCD視覺傳感器和雙傾角傳感器。該系統的硬件分別
2019-08-26 06:40:28
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務機器人控制系統設計。該服務機器人的控制系統是機器人的神經中樞,因而其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。
2019-10-15 08:03:16
最近在看工業機器人的資料,想知道現在的一些市面上的工業機器人上用的控制控制系統都有哪些廠商呀?
2015-01-23 12:04:01
工業機器人的產業鏈分為上游核心零部件,中游本體和傳感器等生產,以及下游的系統集成等。核心零部件是減速機、伺服系統、控制系統三部分,分別對應執行系統、驅動系統、控制系統,分別占成本的35%、25
2017-08-23 15:10:27
模塊化的控制系統體系結構:采用分布式CPU計算機結構,分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線
2018-11-23 10:40:38
怎么實現對機甲大師機器人的控制?
2021-11-19 06:33:45
和較短的靜區時間。”Klaus Kunze 說。通過倍福的標準EtherCAT 端子,完美地實現了力傳感器和伺服驅動的連接。倍福的 SSI終端從機器人腿的位置傳感器采集數據。機械臂和軀干
2015-01-21 17:11:24
閉環控制系統設計及軟硬件實現</strong><br/></font></p>&
2009-12-18 11:02:54
系統的幫助下,自主完成人類指定的工作,如果傳感器的精度差,會直接影響機器人的作業質量,如果傳感器不穩定或者可靠性不高,很容易導致智能機器人出現故障,輕者導致工作不能正常運行,嚴重者還會造成嚴重的事故
2015-01-20 14:56:46
機器人視覺傳感器詳解一種新型的工業機器人已經走到行業的前沿, 他們的主要特點是能夠安全地協助人類工作。在網上有很多人談論它們,但你認真了解過它嗎?
2020-08-14 07:24:17
目前許多高等教育院校采用教育機器人進行課堂教學和培養學生的創新能力。本文設計的教育機器人通過紅外光電傳感器陣列檢測路面信息并利用模糊自整定PID算法將采集的路面信息和電機運行數據進行實時處理,實現教育機器人的智能巡航并將機器人的狀態顯示輸出。
2020-03-17 06:59:50
自動蔽障,自動清掃的功能。清潔機器人是實現智能清掃的主題部分,我們將要做到的是:完成機械結構的設計與制作、硬件電路的設計及實現、底層軟件的編寫以及系統調試、智能手機藍牙通訊技術的研究及實現、清潔機器人
2013-11-08 22:30:10
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-06-30 06:37:34
軟件構建微小的控制系統,在機器人的末梢或手臂部分安裝必要的傳感器,來控制機器人的手臂運動,監測工作中的異常情況,同時也保證了安全生產的進行。而在當下機器人傳感器系統設計中,下一步的趨勢將會是借助傳感器
2015-02-04 16:35:49
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
機器人本體所具有的傳感器外,還應包括整個系統中所用到的其他傳感設施。除了機器人上的通用傳感器外,弧焊機器人特有的弧焊傳感器一般用于焊縫跟蹤、焊接條件檢測、電弧或熔池形態的檢測。而其中應用最多的是焊縫跟蹤
2020-06-16 09:48:50
控制和通信 IC 的發展在實現下一代的機器人中起到重要作用。然而,這些復雜的現代機器人的核心是許多新的、小型化和低成本的傳感技術的出現與融合。對實現下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環境傳感器和電源管理傳感器。
2019-07-31 07:46:31
什么是移動機器人軟硬件系統問題?移動機器人軟硬件系統有哪些問題呢?
2021-11-11 06:07:42
高、硬件實現簡單等優點,在移動機器人感知系統中得到了廣泛的應用。但是超聲波傳感器也存在一定的局限性,主要是因為波束角大、方向性差、測距的不穩定性(在非垂直的反射下)等,因此往往采用多個超聲波傳感器或
2019-02-27 23:29:58
于機器人控制系統當中。那么今天,我們就通過多軸工業機器人來聊聊機器人控制系統以及控制器的實現。 機器人控制系統 機器人控制系統相當于機器人的大腦,是決定機器人功能和性能的主要部分,它一般分為機器人
2023-02-24 17:05:21
0引言傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一定的作業功能,是因為它能夠通過傳感器感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿
2019-07-29 06:09:58
變得更加普遍,同時,它們所具有的功能也會越來越多。機器人示教器是機器人控制系統中的重要組成部分,主要實現用戶與機器人控制器,用戶與機器人本體之間的通信。機器人控制器接收到示教器的運動指令后經過譯碼、邏輯
2017-03-16 14:42:26
介紹了一種基于DSP 的逆變電源控制系統,詳細闡述了系統組成結構和軟硬件設計。該系統采用TMS320F2812 作為主控制器,最大程度的減少了硬件電路的搭建,實現了對逆變電源的數
2009-07-30 10:23:58 34
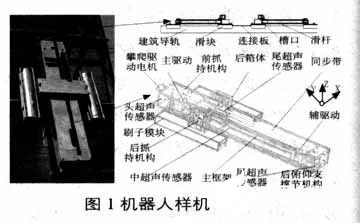
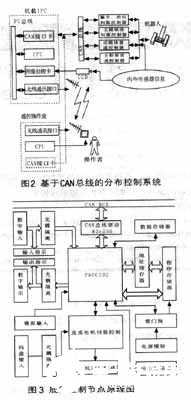
34 基于CAN總線和雙傳感器仿人機器人運動控制系統研究
機器人研究是自動化領域最復雜。最具挑戰性的課題,它集機械。電子。計算機。材料。傳感
2009-10-10 08:57:29823 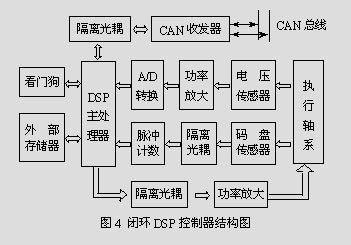
基于片上系統芯片的傳感器模塊軟硬件設計
概述: 本文對研制的傳感器模塊進行了全面的
2010-04-16 13:48:44759 
摘要:針對小型仿人機器人的零力矩點(ZMP)軌跡在線確定問題,設計了一種基于多個簡單一維力/力矩傳感器的腳底傳感陣列系統以及一種距離可調的多孔、雙夾板機構,用以安裝力/力矩傳感器,并實現了腳底傳感器信號多級放大及采集軟硬件系統。應用CAN總線接口實
2011-02-08 15:52:4663 ;基于模糊控制原理,建立了階梯攀爬機器人模糊避障規則,提出了一種基于MC9S12XS128單片機以及超聲波傳感器的階梯攀爬機器人障礙物檢測、避障及樓梯攀爬控制系統,并利用所研制的階梯攀爬機器人樣機進行了機器人避障、樓梯攀爬
2018-03-05 15:05:270 基于CAN總線的主要特點及發展趨勢,我校電液實驗室開放式電液伺服控制系統的改造中采用CAN總線作為現場總線標準,構建了一套基于CAN總線智能節點的現場總線控制系統。文中將詳細介紹智能數據采集模塊
2019-10-31 07:51:002834 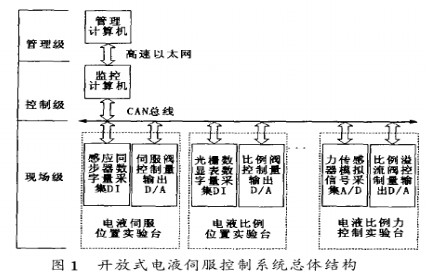
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論