完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 無人機
無人駕駛飛機簡稱“無人機”,英文縮寫為“UAV”,是利用無線電遙控設(shè)備和自備的程序控制裝置操縱的不載人飛機,或者由車載計算機完全地或間歇地自主地操作。
文章:9382個 瀏覽:185236次 帖子:477個

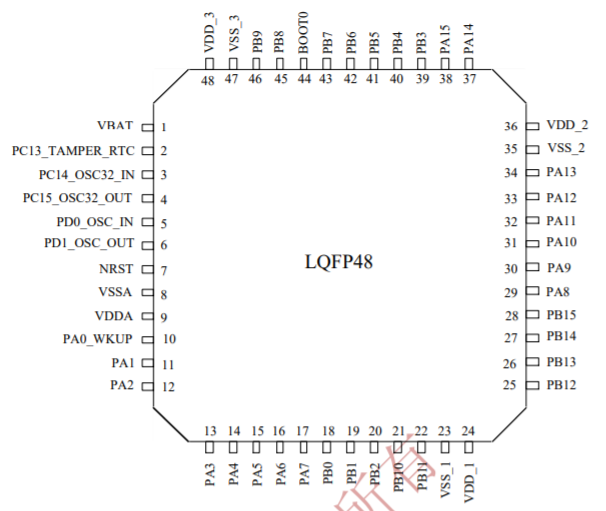
基于F4/F7/H7 MCU的無人機飛行控制系統(tǒng)
PIXHAWK的硬件由PX4FMU/PX4IO兩部分構(gòu)成,它是雙處理器結(jié)構(gòu),一個擅長于強大運算的32 bit STM32F427 Cortex M4 核...

直接序列擴頻(DSSS) 發(fā)送端直接采用高碼率的擴頻碼序列去擴展信號頻譜,接收端通過同樣的擴頻碼序列還原信號。直接序列擴頻將信號擴展成很寬的頻帶,其功率...
2023-10-10 標(biāo)簽:無線傳輸網(wǎng)絡(luò)安全無人機 7132 0
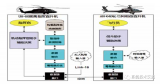
基于圖像識別技術(shù),使用無人機機載圖像識別設(shè)備識別地面目標(biāo)降落點,獲得目標(biāo)降落點與無人機的相對位置。下面主要介紹的是無人機上的圖像識別視覺精準(zhǔn)降落技術(shù)。

ROS有著豐富的輔助開發(fā)工具,包括可視化工具Rviz,仿真工具gazebo。此外,ROS也有著龐大的開發(fā)者基礎(chǔ),支持的功能包也涵蓋優(yōu)化,控制,導(dǎo)航,視覺...
2023-10-08 標(biāo)簽:mcu操作系統(tǒng)UNIX 8520 0
直升機從常規(guī)構(gòu)型向高速復(fù)合構(gòu)型的演變,使其 速度和機動能力出現(xiàn)躍升;信息化互聯(lián)互通為直升機 聯(lián)合作戰(zhàn)體系中各單元之間的信息流動共享構(gòu)建了高 速通道。
2023-10-08 標(biāo)簽:直升機人工智能智能監(jiān)控 989 0
隨之而來的似乎是不可避免的擁堵和成本。沃勒斯坦聲稱,道路現(xiàn)在是世界上最大的基礎(chǔ)設(shè)施投資,全球支出約1.5萬億美元。這并不是給交通擁堵的城市居民和郊區(qū)通勤...
早期類型的制導(dǎo)武器的有限使用也顯示了使用無人平臺在不危及操作人員或平臺的距離上瞄準(zhǔn)對手的軍事力量的優(yōu)勢。由于早期制導(dǎo)系統(tǒng)的局限性,1945年至1980年...

在 label 中填寫待標(biāo)注目標(biāo)名稱,然后將對話框拖到一邊在主窗口中開始標(biāo)注,鼠標(biāo)滾輪放大縮小圖像,按住左鍵移動可視圖像區(qū)域不斷點擊左鍵將目標(biāo)框包圍, ...
電磁干擾會對無人機產(chǎn)生怎樣的影響 電磁干擾無人機的優(yōu)缺點有哪些
電磁干擾可能會擾亂無人機的導(dǎo)航系統(tǒng),如GPS或其他位置定位系統(tǒng)。無人機依賴這些導(dǎo)航系統(tǒng)來確定自身位置、飛行方向和高度等信息。干擾可能導(dǎo)致無人機的導(dǎo)航精度...
2023-09-26 標(biāo)簽:雷達(dá)電磁干擾導(dǎo)航系統(tǒng) 9774 0
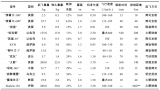
典型自殺式無人機系統(tǒng)主要指標(biāo)參數(shù)
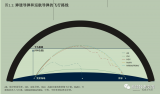
無人機作為現(xiàn)代戰(zhàn)爭異軍突起的新生力量,已由偵察保障逐步演變?yōu)檫M攻主角。自殺式無人機因其既可執(zhí)行偵察任務(wù),也可作為導(dǎo)彈進行自殺式襲擊,在現(xiàn)代局部戰(zhàn)爭和武裝...
2023-09-25 標(biāo)簽:攝像機導(dǎo)航系統(tǒng)人工智能 6414 0
高可靠與高抗毀異構(gòu)網(wǎng)絡(luò)鏈路技術(shù)利用高速跳頻、自適應(yīng)碼率控制、信道估計與干擾檢測等可抵擋普通鏈路技術(shù)的干擾,但在復(fù)雜戰(zhàn)場環(huán)境中,尤其是在戰(zhàn)場末端面對敵方強...

ReDrone 系統(tǒng)是基于埃爾比特公司在EW& SIGINT領(lǐng)域內(nèi)的超精密技術(shù),將先進的信號處理、解碼算法、C4I、網(wǎng)絡(luò)技術(shù)以及尖端的主動和被動...
MQ-4C Triton無人機配備了雷神公司的MTS-B多光譜電光/紅外傳感器,具有額外的激光指示器、定位器和測距功能。該傳感器能夠自動跟蹤MFAS探測...
2023-09-18 標(biāo)簽:無人機雷達(dá)系統(tǒng)有源相控陣 2071 0
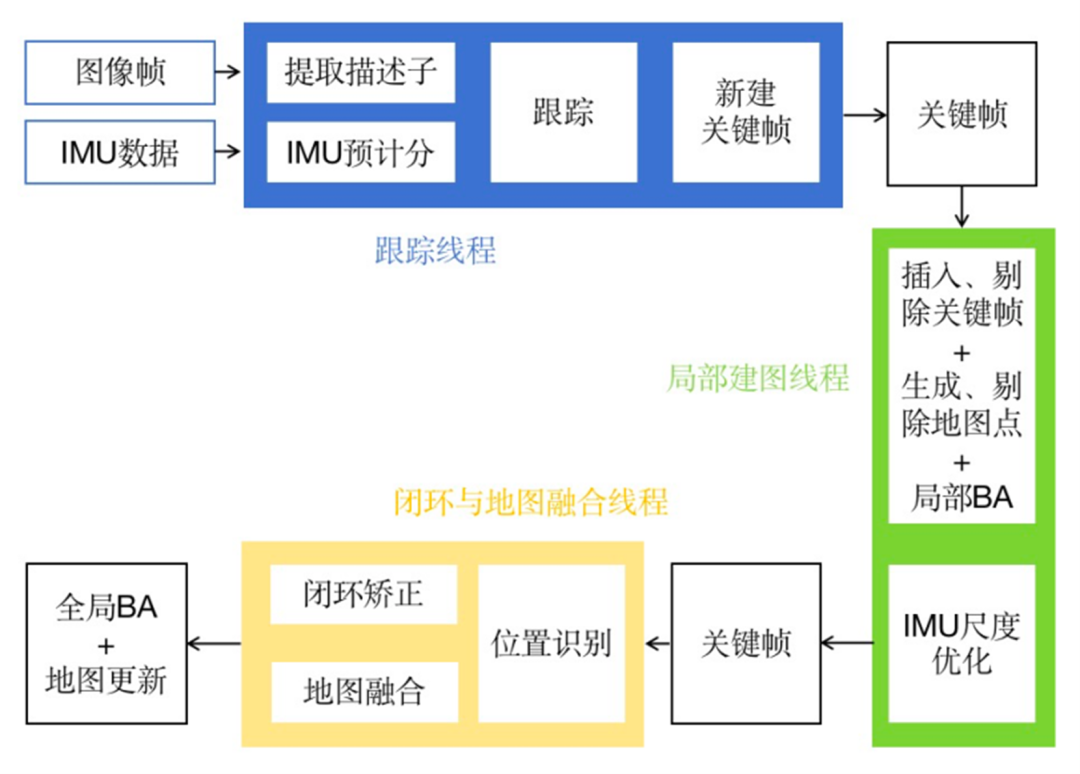
基于英特爾開發(fā)套件使用ORB-SLAM3實現(xiàn)無人機實時定位
工業(yè)建模對于精度有著高要求,這意味著無人機的 SLAM 算法要提供可靠的實時位姿估計。ORB-SLAM3 是目前融合雙目視覺與 IMU 的優(yōu)秀算法,其前...

地面控制站和系統(tǒng)技術(shù)實現(xiàn)原理
無線數(shù)據(jù)鏈路子系統(tǒng)提供與無人駕駛車輛的遠(yuǎn)程通信。遙測數(shù)據(jù)、命令和傳感器數(shù)據(jù)(如視頻、圖像和測量值)可能需要在無人駕駛車輛和 GCS 之間傳輸。通信方法包...
大多數(shù)無人機使用遙控器進行實時控制。遙控器通過發(fā)送無線信號給無人機,包括控制飛行動作(如起飛、降落、懸停、轉(zhuǎn)向)、姿態(tài)調(diào)整(如俯仰、橫滾、偏航)以及開啟...
無人機低空高光譜遙感影像柑橘黃龍病植株監(jiān)測模型探究
引言 為實現(xiàn)大范圍的柑橘黃龍病監(jiān)測預(yù)警,提供一種減少人工成本的柑橘黃龍病病害統(tǒng)計方法,本研究通過地面實測黃龍病植株,協(xié)同無人機采集低空高光譜遙感影像,經(jīng)...

歐荷系列智能無人機電池的型號較多,市場上絕大部分植保無人機和行業(yè)無人機都可以選擇。產(chǎn)品電容量也比較多樣,從較小電容量的10000mah到超大電容量的42...
第一組無人機狼群被齊射后,探測敵防空系統(tǒng),并將收集的情報傳輸給有人直升機,或地面部隊,或者其他組別的無人機狼群。
2023-09-14 標(biāo)簽:無人機 1695 0
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1