 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
引言
隨著控制技術(shù)及計(jì)算機(jī)技術(shù)的發(fā)展,智能車系統(tǒng)將在未來工業(yè)生產(chǎn)和日常生活中扮演重要的角色。本文所述智能車尋跡系統(tǒng)采用紅外反射式光電管識(shí)別路徑上的黑線,并以最短的時(shí)間完成尋跡。通過加長(zhǎng)轉(zhuǎn)臂的舵機(jī)驅(qū)動(dòng)前輪轉(zhuǎn)向,使用符合PI算法的控制器實(shí)現(xiàn)直流電機(jī)的調(diào)速。為了使智能車快速、平穩(wěn)地行駛,系統(tǒng)必須把路徑識(shí)別、相應(yīng)的轉(zhuǎn)向伺服電機(jī)控制以及直流驅(qū)動(dòng)電機(jī)控制準(zhǔn)確地結(jié)合在一起。
1 硬件設(shè)計(jì)
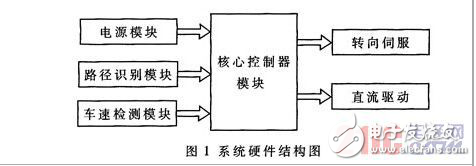
本系統(tǒng)硬件部分以飛思卡爾公司的16位微處理器MC9S12DG128為控制核心,由電源模塊、主控制器模塊、路徑識(shí)別模塊、車速檢測(cè)模塊、舵機(jī)控制模塊和直流驅(qū)動(dòng)電機(jī)控制模塊組成。系統(tǒng)硬件結(jié)構(gòu)如圖1所示。
1.1 主控制器模塊
本系統(tǒng)主控制器模塊采用的MC9S12DG128主要特點(diǎn)是功能高度集中,易于擴(kuò)展且支持C語(yǔ)言程序設(shè)計(jì),從而降低了系統(tǒng)開發(fā)和調(diào)試的復(fù)雜度。
1.2 電源模塊
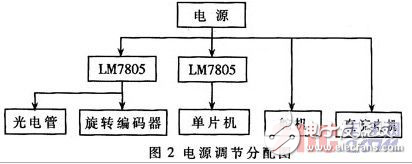
本系統(tǒng)由7.2V/2000mAh的Ni-cd蓄電池組直接供電。鑒于單片機(jī)系統(tǒng)的核心作用,主控制器模塊采用單獨(dú)的穩(wěn)壓電路進(jìn)行供電;為提高舵機(jī)響應(yīng)速度,將電源正極串接一個(gè)二極管后直接加在舵機(jī)上;電機(jī)驅(qū)動(dòng)芯片MC33886直接由電源供電。通過外圍電路整定,電源被分配給各個(gè)模塊。電源調(diào)節(jié)分配圖如圖2所示。
1.3 路徑識(shí)別模塊
路徑識(shí)別模塊采用收發(fā)一體的紅外反射式光電管JY043作為路徑的基本檢測(cè)元件。本系統(tǒng)選用11個(gè)JY043按“一”字形排列在20cm長(zhǎng)的電路板上,相鄰兩個(gè)光電管之間間隔2cm。因?yàn)槁窂杰壽E由黑線指示,落在黑線區(qū)域內(nèi)的光電二極管接收到的反射光線強(qiáng)度與白色的不同,所以根據(jù)檢測(cè)到黑線的光電管的位置可以判斷行車方向。光電傳感器尋跡的優(yōu)點(diǎn)是電路簡(jiǎn)單、信號(hào)處理速度快。在不受外部因素影響的前提下,光電管能夠感知的前方距離越遠(yuǎn),行駛效率越高,即智能車的預(yù)瞄性能越強(qiáng)。
隨著控制技術(shù)及計(jì)算機(jī)技術(shù)的發(fā)展,智能車系統(tǒng)將在未來工業(yè)生產(chǎn)和日常生活中扮演重要的角色。本文所述智能車尋跡系統(tǒng)采用紅外反射式光電管識(shí)別路徑上的黑線,并以最短的時(shí)間完成尋跡。通過加長(zhǎng)轉(zhuǎn)臂的舵機(jī)驅(qū)動(dòng)前輪轉(zhuǎn)向,使用符合PI算法的控制器實(shí)現(xiàn)直流電機(jī)的調(diào)速。為了使智能車快速、平穩(wěn)地行駛,系統(tǒng)必須把路徑識(shí)別、相應(yīng)的轉(zhuǎn)向伺服電機(jī)控制以及直流驅(qū)動(dòng)電機(jī)控制準(zhǔn)確地結(jié)合在一起。
1 硬件設(shè)計(jì)
本系統(tǒng)硬件部分以飛思卡爾公司的16位微處理器MC9S12DG128為控制核心,由電源模塊、主控制器模塊、路徑識(shí)別模塊、車速檢測(cè)模塊、舵機(jī)控制模塊和直流驅(qū)動(dòng)電機(jī)控制模塊組成。系統(tǒng)硬件結(jié)構(gòu)如圖1所示。
1.1 主控制器模塊
本系統(tǒng)主控制器模塊采用的MC9S12DG128主要特點(diǎn)是功能高度集中,易于擴(kuò)展且支持C語(yǔ)言程序設(shè)計(jì),從而降低了系統(tǒng)開發(fā)和調(diào)試的復(fù)雜度。
1.2 電源模塊
本系統(tǒng)由7.2V/2000mAh的Ni-cd蓄電池組直接供電。鑒于單片機(jī)系統(tǒng)的核心作用,主控制器模塊采用單獨(dú)的穩(wěn)壓電路進(jìn)行供電;為提高舵機(jī)響應(yīng)速度,將電源正極串接一個(gè)二極管后直接加在舵機(jī)上;電機(jī)驅(qū)動(dòng)芯片MC33886直接由電源供電。通過外圍電路整定,電源被分配給各個(gè)模塊。電源調(diào)節(jié)分配圖如圖2所示。
1.3 路徑識(shí)別模塊
路徑識(shí)別模塊采用收發(fā)一體的紅外反射式光電管JY043作為路徑的基本檢測(cè)元件。本系統(tǒng)選用11個(gè)JY043按“一”字形排列在20cm長(zhǎng)的電路板上,相鄰兩個(gè)光電管之間間隔2cm。因?yàn)槁窂杰壽E由黑線指示,落在黑線區(qū)域內(nèi)的光電二極管接收到的反射光線強(qiáng)度與白色的不同,所以根據(jù)檢測(cè)到黑線的光電管的位置可以判斷行車方向。光電傳感器尋跡的優(yōu)點(diǎn)是電路簡(jiǎn)單、信號(hào)處理速度快。在不受外部因素影響的前提下,光電管能夠感知的前方距離越遠(yuǎn),行駛效率越高,即智能車的預(yù)瞄性能越強(qiáng)。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- CNN圖像識(shí)別的路徑搜索設(shè)計(jì)方案 16次下載
- CCD攝像頭在智能車路徑識(shí)別上應(yīng)用的詳細(xì)資料說明 11次下載
- 如何使用光電管進(jìn)行智能車模自動(dòng)循線控制系統(tǒng)的設(shè)計(jì) 2次下載
- 智能車光電傳感器布局對(duì)路徑識(shí)別有哪些影響詳細(xì)資料研究 10次下載
- 如何設(shè)計(jì)一個(gè)具有路徑記憶功能的智能車控制系統(tǒng)的資料概述 16次下載
- 一種自動(dòng)循跡智能車控制系統(tǒng) 2次下載
- 基于光電管路徑識(shí)別的智能車系統(tǒng)設(shè)計(jì)方案 1次下載
- 基于紅外線光電傳感器尋跡的智能車系統(tǒng)設(shè)計(jì)方法 5次下載
- 學(xué)做智能車挑戰(zhàn)飛思卡爾之6光電管型設(shè)計(jì) 0次下載
- 基于FPGA的智能車路徑圖像識(shí)別的預(yù)處理設(shè)計(jì) 23次下載
- 基于激光傳感器的智能車路徑識(shí)別算法研究 48次下載
- 智能車兩類路徑識(shí)別系統(tǒng)比較研究 0次下載
- 基于虛擬儀器技術(shù)的智能車仿真系統(tǒng) 53次下載
- 飛思卡爾智能車控制系統(tǒng)設(shè)計(jì) 164次下載
- 基于路徑識(shí)別的智能車系統(tǒng)設(shè)計(jì)
- 基于機(jī)器視覺的智能車系統(tǒng) 1838次閱讀
- 圖像分類法實(shí)現(xiàn)智能車找路功能 1731次閱讀
- 基于電感感應(yīng)電動(dòng)勢(shì)實(shí)現(xiàn)磁場(chǎng)信號(hào)引導(dǎo)車的設(shè)計(jì) 2492次閱讀
- 基于MC68S912DP256芯片實(shí)現(xiàn)智能車導(dǎo)航系統(tǒng)的設(shè)計(jì) 2354次閱讀
- 基于連續(xù)控制算法實(shí)現(xiàn)光電傳感器的連續(xù)路徑識(shí)別 1070次閱讀
- 微雪電子智能車Arduino AlphaBot2簡(jiǎn)介 2275次閱讀
- 光電管的結(jié)構(gòu) 8680次閱讀
- 光電管為什么要裝在暗盒里 9919次閱讀
- 微雪電子樹莓派 Arduino 智能車擴(kuò)展套件介紹 2387次閱讀
- 簡(jiǎn)述光電管的工作原理_光電管伏安特性曲線 3.3w次閱讀
- 光電傳感器對(duì)智能車的控制設(shè)計(jì) 2059次閱讀
- 智能車舵機(jī)控制算法詳解 3w次閱讀
- 智能車牌識(shí)別的交通燈控制系統(tǒng)的設(shè)計(jì) 4246次閱讀
- 基于ARM的光學(xué)指紋識(shí)別系統(tǒng)的設(shè)計(jì)方案 2259次閱讀
- 三軸加速度傳感器在智能車控制與道路識(shí)別中的應(yīng)用 1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1EN60335-1安規(guī)標(biāo)準(zhǔn) 中文版本
- 1.86 MB | 53次下載 | 1 積分
- 2TDA7850音頻功率放大器英文手冊(cè)
- 0.39 MB | 1次下載 | 免費(fèi)
- 3VCC啟動(dòng)電路(可下載)
- 748.32 KB | 1次下載 | 免費(fèi)
- 460KW電機(jī)控制器硬件驅(qū)動(dòng)電路設(shè)計(jì)(可下載)
- 720.01 KB | 1次下載 | 免費(fèi)
- 5LTD1534RFN N溝道增強(qiáng)型功率MOSFET規(guī)格書
- 1.11 MB | 次下載 | 免費(fèi)
- 6LT1702SI P溝道增強(qiáng)型功率MOSFET規(guī)格書
- 1.04 MB | 次下載 | 免費(fèi)
- 7LT1713SI N溝道增強(qiáng)型功率MOSFET規(guī)格書
- 0.85 MB | 次下載 | 免費(fèi)
- 8反電動(dòng)勢(shì)到底如何來理解?(可下載)
- 1.63 MB | 次下載 | 免費(fèi)
本月
- 1STM32CubeMX用于STM32配置和初始化C代碼生成
- 21.90 MB | 626次下載 | 免費(fèi)
- 2STM32開發(fā)板教程之STM32開發(fā)指南免費(fèi)下載
- 24.88 MB | 176次下載 | 3 積分
- 3EN60335-1安規(guī)標(biāo)準(zhǔn) 中文版本
- 1.86 MB | 53次下載 | 1 積分
- 4OAH0428最新規(guī)格書(中文)
- 2.52 MB | 28次下載 | 10 積分
- 5Altium-常用3D封裝庫(kù)(Step)接插件篇
- 4.95 MB | 26次下載 | 免費(fèi)
- 6UHV系列雷電沖擊電壓發(fā)生器試驗(yàn)裝置詳細(xì)說明使用
- 1.07 MB | 17次下載 | 免費(fèi)
- 7介紹一些常用的電子元器件
- 3.20 MB | 8次下載 | 免費(fèi)
- 8麻將機(jī)升降電路
- 0.12 MB | 6次下載 | 1 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935124次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420063次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191371次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183336次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81583次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73814次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論