 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
引言
隨著計(jì)算機(jī)網(wǎng)絡(luò)上的高速發(fā)展,使得信息的交流與共享變得空前廣泛和自如,而這項(xiàng)技術(shù)也滲入到自動(dòng)化領(lǐng)域的變革當(dāng)中,現(xiàn)場(chǎng)總線(Fieldbus)由此應(yīng)運(yùn)而生,開創(chuàng)了工業(yè)控制的新篇章。現(xiàn)場(chǎng)總線是一種應(yīng)用于生產(chǎn)現(xiàn)場(chǎng),在現(xiàn)場(chǎng)設(shè)備之間、現(xiàn)場(chǎng)設(shè)備和控制裝置之間實(shí)行雙向、串形、多結(jié)點(diǎn)的數(shù)字通信技術(shù),在當(dāng)今自動(dòng)化領(lǐng)域中具有廣闊的發(fā)展前景。本文給出了一種基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)設(shè)計(jì)方案,實(shí)現(xiàn)對(duì)開關(guān)量的數(shù)據(jù)采集和對(duì)外部設(shè)備的控制功能。
控制器局域網(wǎng)(Controller Area Network,CAN)總線是現(xiàn)場(chǎng)總線的一種,是一種有效支持分布式控制或?qū)崟r(shí)控制的串行網(wǎng)絡(luò)通信,已經(jīng)被廣泛地應(yīng)用于工業(yè)自動(dòng)化、船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等方面,并被公認(rèn)為最有前途的現(xiàn)場(chǎng)總線之一,其主要特點(diǎn)如下:
(1)CAN是有國際標(biāo)準(zhǔn)的現(xiàn)場(chǎng)總線。
(2)CAN為多主工作方式,網(wǎng)絡(luò)上的任意一節(jié)點(diǎn)都可在任意時(shí)刻向網(wǎng)絡(luò)上的其他節(jié)點(diǎn)發(fā)送信息,且不分主從。
(3)CAN采用非破壞總線仲裁技術(shù)。當(dāng)多個(gè)節(jié)點(diǎn)同時(shí)向總線發(fā)送信息出現(xiàn)沖突時(shí),優(yōu)先級(jí)低的節(jié)點(diǎn)將主動(dòng)退出發(fā)送,而優(yōu)先級(jí)高的節(jié)點(diǎn)不受影響繼續(xù)發(fā)送。
(4)CAN節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)關(guān)閉輸出功能,使總線上其他節(jié)點(diǎn)的操作不受影響。
(5)報(bào)文采用短幀結(jié)構(gòu),傳輸時(shí)間短,受干擾概率低,而且每幀都有CRC校驗(yàn)及其他校驗(yàn)措施,具有極好的檢錯(cuò)效果。
(6)CAN的直接最遠(yuǎn)通信距離可達(dá)10 km,最高通信速率可達(dá)1 Mb/s。
1 系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì)
系統(tǒng)主要由上位機(jī)(PC機(jī))和數(shù)據(jù)采集和控制模塊組成。系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì)如圖1所示。
上位機(jī)是整個(gè)系統(tǒng)的核心,實(shí)現(xiàn)系統(tǒng)的監(jiān)控和管理功能。CAN總線智能適配卡的作用是收集各個(gè)CAN節(jié)點(diǎn)上的數(shù)據(jù),然后轉(zhuǎn)發(fā)到上位機(jī),同時(shí)把上位機(jī)的命令轉(zhuǎn)發(fā)到各個(gè)節(jié)點(diǎn)。由于CAN總線特有的多主傳輸方式,各個(gè)節(jié)點(diǎn)根據(jù)需要自主地向總線發(fā)送數(shù)據(jù),而且在上位機(jī)監(jiān)聽各個(gè)節(jié)點(diǎn)的同時(shí),節(jié)點(diǎn)也實(shí)時(shí)監(jiān)聽總線并接收自己需要的數(shù)據(jù)。數(shù)據(jù)采集和控制模塊采用微處理器和可編程的CAN控制芯片,主要用于完成現(xiàn)場(chǎng)數(shù)據(jù)的采集、數(shù)據(jù)的傳送以及各個(gè)現(xiàn)場(chǎng)設(shè)備運(yùn)行的控制。
2 數(shù)據(jù)采集和控制模塊硬件設(shè)計(jì)
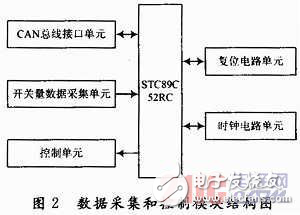
基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)將功能盡可能地分散到各個(gè)控制模塊中,各個(gè)模塊以微處理器為核心,完成數(shù)據(jù)采集和控制功能。為了使信息能在CAN協(xié)議的標(biāo)準(zhǔn)下進(jìn)行通信,各個(gè)模塊都設(shè)有CAN總線接口電路。該模塊的微處理器(MCU)選用宏晶科技的STC89C52RC單片機(jī)。STC89C52RC是新一代超強(qiáng)抗干擾、高速、低功耗的8位單片機(jī),指令代碼完全兼容傳統(tǒng)的8051單片機(jī),36個(gè)通用I/O口,3個(gè)16位定時(shí)器/計(jì)數(shù)器,4路外部中斷。根據(jù)實(shí)際需求分析,STC89C52RC單片機(jī)完全滿足本設(shè)計(jì)的需求。數(shù)據(jù)采集和控制模塊的結(jié)構(gòu)如圖2所示。
隨著計(jì)算機(jī)網(wǎng)絡(luò)上的高速發(fā)展,使得信息的交流與共享變得空前廣泛和自如,而這項(xiàng)技術(shù)也滲入到自動(dòng)化領(lǐng)域的變革當(dāng)中,現(xiàn)場(chǎng)總線(Fieldbus)由此應(yīng)運(yùn)而生,開創(chuàng)了工業(yè)控制的新篇章。現(xiàn)場(chǎng)總線是一種應(yīng)用于生產(chǎn)現(xiàn)場(chǎng),在現(xiàn)場(chǎng)設(shè)備之間、現(xiàn)場(chǎng)設(shè)備和控制裝置之間實(shí)行雙向、串形、多結(jié)點(diǎn)的數(shù)字通信技術(shù),在當(dāng)今自動(dòng)化領(lǐng)域中具有廣闊的發(fā)展前景。本文給出了一種基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)設(shè)計(jì)方案,實(shí)現(xiàn)對(duì)開關(guān)量的數(shù)據(jù)采集和對(duì)外部設(shè)備的控制功能。
控制器局域網(wǎng)(Controller Area Network,CAN)總線是現(xiàn)場(chǎng)總線的一種,是一種有效支持分布式控制或?qū)崟r(shí)控制的串行網(wǎng)絡(luò)通信,已經(jīng)被廣泛地應(yīng)用于工業(yè)自動(dòng)化、船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等方面,并被公認(rèn)為最有前途的現(xiàn)場(chǎng)總線之一,其主要特點(diǎn)如下:
(1)CAN是有國際標(biāo)準(zhǔn)的現(xiàn)場(chǎng)總線。
(2)CAN為多主工作方式,網(wǎng)絡(luò)上的任意一節(jié)點(diǎn)都可在任意時(shí)刻向網(wǎng)絡(luò)上的其他節(jié)點(diǎn)發(fā)送信息,且不分主從。
(3)CAN采用非破壞總線仲裁技術(shù)。當(dāng)多個(gè)節(jié)點(diǎn)同時(shí)向總線發(fā)送信息出現(xiàn)沖突時(shí),優(yōu)先級(jí)低的節(jié)點(diǎn)將主動(dòng)退出發(fā)送,而優(yōu)先級(jí)高的節(jié)點(diǎn)不受影響繼續(xù)發(fā)送。
(4)CAN節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)關(guān)閉輸出功能,使總線上其他節(jié)點(diǎn)的操作不受影響。
(5)報(bào)文采用短幀結(jié)構(gòu),傳輸時(shí)間短,受干擾概率低,而且每幀都有CRC校驗(yàn)及其他校驗(yàn)措施,具有極好的檢錯(cuò)效果。
(6)CAN的直接最遠(yuǎn)通信距離可達(dá)10 km,最高通信速率可達(dá)1 Mb/s。
1 系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì)
系統(tǒng)主要由上位機(jī)(PC機(jī))和數(shù)據(jù)采集和控制模塊組成。系統(tǒng)總體結(jié)構(gòu)設(shè)計(jì)如圖1所示。
上位機(jī)是整個(gè)系統(tǒng)的核心,實(shí)現(xiàn)系統(tǒng)的監(jiān)控和管理功能。CAN總線智能適配卡的作用是收集各個(gè)CAN節(jié)點(diǎn)上的數(shù)據(jù),然后轉(zhuǎn)發(fā)到上位機(jī),同時(shí)把上位機(jī)的命令轉(zhuǎn)發(fā)到各個(gè)節(jié)點(diǎn)。由于CAN總線特有的多主傳輸方式,各個(gè)節(jié)點(diǎn)根據(jù)需要自主地向總線發(fā)送數(shù)據(jù),而且在上位機(jī)監(jiān)聽各個(gè)節(jié)點(diǎn)的同時(shí),節(jié)點(diǎn)也實(shí)時(shí)監(jiān)聽總線并接收自己需要的數(shù)據(jù)。數(shù)據(jù)采集和控制模塊采用微處理器和可編程的CAN控制芯片,主要用于完成現(xiàn)場(chǎng)數(shù)據(jù)的采集、數(shù)據(jù)的傳送以及各個(gè)現(xiàn)場(chǎng)設(shè)備運(yùn)行的控制。
2 數(shù)據(jù)采集和控制模塊硬件設(shè)計(jì)
基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)將功能盡可能地分散到各個(gè)控制模塊中,各個(gè)模塊以微處理器為核心,完成數(shù)據(jù)采集和控制功能。為了使信息能在CAN協(xié)議的標(biāo)準(zhǔn)下進(jìn)行通信,各個(gè)模塊都設(shè)有CAN總線接口電路。該模塊的微處理器(MCU)選用宏晶科技的STC89C52RC單片機(jī)。STC89C52RC是新一代超強(qiáng)抗干擾、高速、低功耗的8位單片機(jī),指令代碼完全兼容傳統(tǒng)的8051單片機(jī),36個(gè)通用I/O口,3個(gè)16位定時(shí)器/計(jì)數(shù)器,4路外部中斷。根據(jù)實(shí)際需求分析,STC89C52RC單片機(jī)完全滿足本設(shè)計(jì)的需求。數(shù)據(jù)采集和控制模塊的結(jié)構(gòu)如圖2所示。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于ARM和CAN總線的分布式數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
- 基于ARM的溫室環(huán)境控制系統(tǒng)和數(shù)據(jù)采集方案 12次下載
- 采用USB和CAN總線的電力監(jiān)控數(shù)據(jù)采集系統(tǒng) 14次下載
- 基于MODBUS總線的數(shù)據(jù)采集與開關(guān)控制系統(tǒng)設(shè)計(jì)仿真的C語言程序 25次下載
- 基于機(jī)械臂控制系統(tǒng)的數(shù)據(jù)采集模塊研究 4次下載
- 基于ARM的數(shù)據(jù)采集與控制系統(tǒng)設(shè)計(jì) 2次下載
- 基于CAN總線的數(shù)據(jù)采集與控制系統(tǒng)設(shè)計(jì)_郝壽朋/劉瑞玲 6次下載
- 基于CAN總線的電極箔生產(chǎn)控制系統(tǒng)
- 基于CAN總線和DSP的雙層數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)
- 基于LabVIEW和USB-CAN卡的實(shí)時(shí)數(shù)據(jù)采集系統(tǒng)及應(yīng)用
- 基于CAN總線的浮標(biāo)數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
- 工程設(shè)備CAN總線控制系統(tǒng)設(shè)計(jì)
- 基于CAN總線技術(shù)的車輛虛擬儀表數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)
- 基于CAN 總線的數(shù)據(jù)采集模塊設(shè)計(jì)
- 基于DSP和CAN總線的機(jī)車故障數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
- RTU數(shù)據(jù)采集終端的工作原理 2449次閱讀
- 基于VAX/VMS CAMAC串行總線實(shí)現(xiàn)數(shù)據(jù)采集及控制系統(tǒng)的應(yīng)用方案 2077次閱讀
- 基于工業(yè)控制計(jì)算機(jī)和總線技術(shù)實(shí)現(xiàn)卷接包數(shù)據(jù)采集管理系統(tǒng)的設(shè)計(jì) 2779次閱讀
- 基于80C196KC單片機(jī)結(jié)合CAN總線實(shí)現(xiàn)開放式電液伺服控制系統(tǒng)的設(shè)計(jì) 1444次閱讀
- 基于USB數(shù)據(jù)總線實(shí)現(xiàn)多點(diǎn)數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì) 1586次閱讀
- 利用DriverWorks開發(fā)工具實(shí)現(xiàn)PXI總線數(shù)據(jù)采集卡的設(shè)計(jì) 1138次閱讀
- 通過CAN-bus總線對(duì)室內(nèi)空調(diào)的溫/濕度模擬系統(tǒng)進(jìn)行控制 2046次閱讀
- 采用CAN總線技術(shù)的智能節(jié)點(diǎn)在集散控制系統(tǒng)中的應(yīng)用 1049次閱讀
- 基于PC的數(shù)據(jù)采集系統(tǒng)設(shè)計(jì) 5421次閱讀
- 汽車電子控制系統(tǒng)上的CAN總線通訊介紹 1.3w次閱讀
- CAN總線實(shí)現(xiàn)運(yùn)動(dòng)控制系統(tǒng)網(wǎng)絡(luò)化的軟硬件設(shè)計(jì) 3424次閱讀
- 基于網(wǎng)絡(luò)的數(shù)據(jù)采集與控制系統(tǒng)輕松實(shí)現(xiàn) 3538次閱讀
- 基于單片機(jī)與PC通信的數(shù)據(jù)采集控制系統(tǒng)設(shè)計(jì)研究 4245次閱讀
- 基于DSP 技術(shù)和CAN總線的多節(jié)點(diǎn)遠(yuǎn)程數(shù)據(jù)傳輸系統(tǒng) 2885次閱讀
- dsPIC3F3013的CAN總線數(shù)據(jù)采集系統(tǒng) 1992次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1491次下載 | 免費(fèi)
- 2單片機(jī)典型實(shí)例介紹
- 18.19 MB | 95次下載 | 1 積分
- 3S7-200PLC編程實(shí)例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識(shí)別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 11次下載 | 免費(fèi)
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7基于單片機(jī)和 SG3525的程控開關(guān)電源設(shè)計(jì)
- 0.23 MB | 4次下載 | 免費(fèi)
- 8基于AT89C2051/4051單片機(jī)編程器的實(shí)驗(yàn)
- 0.11 MB | 4次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21539次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183277次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論