 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
本文將介紹一種應用于尋跡小車的分布式控制系統的設計方法,該系統可對電機模塊、傳感器模塊和燈控模塊進行分布式控制。這樣設計是為該系統將來從尋跡小車到真車進行移植提供方便。
此尋跡小車模型采用7.5V電池驅動,通過改變PWM占空比調速。小車可以在不完全確定的道路環境下,通過自我判斷,對周圍環境進行探測,并做出相應的反應(如左拐彎、右拐彎和改變速度等)。目前用在機器人上的多為價格較貴的超聲波傳感器和紅外傳感器等,本設計采用價格便宜的反射式光耦傳感器來完成對周圍環境的感知。此外,小車還具有良好的導航系統。
系統結構
本系統采用分布式結構,如圖1所示。因為在車身控制系統中控制對象多而且分散,若采用點對點的集中控制方式,控制模塊與被控對象之間就需要大量連接電纜,會導致車內布線復雜且制造和安裝困難,并存在故障隱患。分布式系統結構可以根據控制對象的位置來設計控制模塊,從而縮短了控制對象與控制模塊之間的距離。各模塊間通過LIN總線來通信,該方式僅需要一根線作為通信線。此外,分布式系統結構還可降低單板的靜態電流,增加單板的穩定性。

圖1分布式車身控制系統結構圖1主控制模塊的設計
根據系統功能要求和結構特點,本控制系統被分成主控模塊和三個子模塊(傳感器模塊、電機控制模塊和燈控模塊)。其中主控模塊主要檢測車身主體部分控制開關的狀態,并根據這些控制開關的狀態實現相應的控制策略,然后將控制命令通過CAN總線和LIN總線發送給相應的子模塊,之后根據各子模塊反饋的負載狀態判斷是否存在故障,若有故障則報警顯示。同時,CAN總線接收上層CAN網絡的某些信息。主控制模塊的微控制器采用了可靠性高、抗干擾能力強的汽車專用芯片XC164CS,其內部集成了CAN的控制器。圖2是主控制模塊的硬件原理圖。
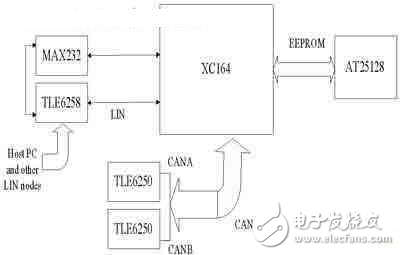
圖2主控制器模塊硬件原理圖2直流電機驅動與控制模塊的設計
電機控制模塊中的微控制器采用的也是XC164CS,這是由于該系列微控制器中都有相應的單元可以實現對電機的控制,相當方便。本設計使用了兩路電機控制小車的后輪驅動和前輪轉向。對直流電機的驅動和控制采用了電機控制接口芯片TLE6209,它的內部集成了一個H型橋式電路,用來驅動電機,實現電機的四象限運行,分別對應正轉、正轉制動、反轉和反轉制動。16位微控制器XC164CS通過內部的CAPCOM模塊產生一個10kHz的PWM信號給TLE6209,觸發H橋電路。
此尋跡小車模型采用7.5V電池驅動,通過改變PWM占空比調速。小車可以在不完全確定的道路環境下,通過自我判斷,對周圍環境進行探測,并做出相應的反應(如左拐彎、右拐彎和改變速度等)。目前用在機器人上的多為價格較貴的超聲波傳感器和紅外傳感器等,本設計采用價格便宜的反射式光耦傳感器來完成對周圍環境的感知。此外,小車還具有良好的導航系統。
系統結構
本系統采用分布式結構,如圖1所示。因為在車身控制系統中控制對象多而且分散,若采用點對點的集中控制方式,控制模塊與被控對象之間就需要大量連接電纜,會導致車內布線復雜且制造和安裝困難,并存在故障隱患。分布式系統結構可以根據控制對象的位置來設計控制模塊,從而縮短了控制對象與控制模塊之間的距離。各模塊間通過LIN總線來通信,該方式僅需要一根線作為通信線。此外,分布式系統結構還可降低單板的靜態電流,增加單板的穩定性。
圖1分布式車身控制系統結構圖1主控制模塊的設計
根據系統功能要求和結構特點,本控制系統被分成主控模塊和三個子模塊(傳感器模塊、電機控制模塊和燈控模塊)。其中主控模塊主要檢測車身主體部分控制開關的狀態,并根據這些控制開關的狀態實現相應的控制策略,然后將控制命令通過CAN總線和LIN總線發送給相應的子模塊,之后根據各子模塊反饋的負載狀態判斷是否存在故障,若有故障則報警顯示。同時,CAN總線接收上層CAN網絡的某些信息。主控制模塊的微控制器采用了可靠性高、抗干擾能力強的汽車專用芯片XC164CS,其內部集成了CAN的控制器。圖2是主控制模塊的硬件原理圖。
圖2主控制器模塊硬件原理圖2直流電機驅動與控制模塊的設計
電機控制模塊中的微控制器采用的也是XC164CS,這是由于該系列微控制器中都有相應的單元可以實現對電機的控制,相當方便。本設計使用了兩路電機控制小車的后輪驅動和前輪轉向。對直流電機的驅動和控制采用了電機控制接口芯片TLE6209,它的內部集成了一個H型橋式電路,用來驅動電機,實現電機的四象限運行,分別對應正轉、正轉制動、反轉和反轉制動。16位微控制器XC164CS通過內部的CAPCOM模塊產生一個10kHz的PWM信號給TLE6209,觸發H橋電路。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于CAN總線的水下航行器分布式控制系統 9次下載
- Freelance 800F分布式控制系統 5次下載
- 用于可編程邏輯控制和分布式控制系統的ICS
- 鏈式靜止無功補償器分布式控制系統 0次下載
- 基于CAN/LIN 實現車門分布式控制系統的設計與研究 7次下載
- 基于CAN總線的染色機分布式控制系統_周怡君 0次下載
- 通用智能機器人分布式控制系統的設計與實現 5次下載
- 基于分布式控制系統的輪式智能機器人研究 5次下載
- 基于分布式控制系統的輪式智能機器人研究
- CAN總線的分布式控制系統中組態軟件的應用 27次下載
- 新型的高壓變頻分布式控制系統 40次下載
- 工業機器人分布式控制系統實例 112次下載
- CAN總線在車輛分布式控制系統中的應用
- Modbus通信協議在分布式控制系統中的應用
- 基于CAN變電站分布式控制系統的設計
- 一種完全分布式的點線協同視覺慣性導航系統 470次閱讀
- tldb提供分布式鎖使用方法 923次閱讀
- 一文詳解Git分布式版本控制系統 789次閱讀
- 基于分布式控制的MVBC總線物理層接口的幀收發器產品設計 1232次閱讀
- 基于TMS320F2812 DSP實現三協同分布式控制系統的設計 1146次閱讀
- 基于嵌入式操作系統實現HIRFL_CSR多層分布式控制系統的前端設計 1109次閱讀
- 分布式控制系統的介紹 5533次閱讀
- DCS控制系統的選型設計調試 4397次閱讀
- 基于多智能體一致性算法分布式協同的能源互聯網控制 7502次閱讀
- 【新專利介紹】一種基于PLC分布式IO的智能電能表校驗系統 1818次閱讀
- dcs控制系統的應用實例詳解 2.7w次閱讀
- DCS控制系統在熱電站中的應用 4274次閱讀
- 一種基于分布式算法的低通FIR濾波器 3282次閱讀
- 深度解讀分布式存儲技術之分布式剪枝系統 1861次閱讀
- 工業控制系統SCADA/DCS和PLC有何區別?SCADA/DCS和PLC的概述 1.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1EN60335-1安規標準 中文版本
- 1.86 MB | 53次下載 | 1 積分
- 2TDA7850音頻功率放大器英文手冊
- 0.39 MB | 1次下載 | 免費
- 3VCC啟動電路(可下載)
- 748.32 KB | 1次下載 | 免費
- 460KW電機控制器硬件驅動電路設計(可下載)
- 720.01 KB | 1次下載 | 免費
- 5LTD1534RFN N溝道增強型功率MOSFET規格書
- 1.11 MB | 次下載 | 免費
- 6LT1702SI P溝道增強型功率MOSFET規格書
- 1.04 MB | 次下載 | 免費
- 7LT1713SI N溝道增強型功率MOSFET規格書
- 0.85 MB | 次下載 | 免費
- 8反電動勢到底如何來理解?(可下載)
- 1.63 MB | 次下載 | 免費
本月
- 1STM32CubeMX用于STM32配置和初始化C代碼生成
- 21.90 MB | 626次下載 | 免費
- 2STM32開發板教程之STM32開發指南免費下載
- 24.88 MB | 176次下載 | 3 積分
- 3EN60335-1安規標準 中文版本
- 1.86 MB | 53次下載 | 1 積分
- 4OAH0428最新規格書(中文)
- 2.52 MB | 28次下載 | 10 積分
- 5Altium-常用3D封裝庫(Step)接插件篇
- 4.95 MB | 26次下載 | 免費
- 6UHV系列雷電沖擊電壓發生器試驗裝置詳細說明使用
- 1.07 MB | 17次下載 | 免費
- 7介紹一些常用的電子元器件
- 3.20 MB | 8次下載 | 免費
- 8麻將機升降電路
- 0.12 MB | 6次下載 | 1 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935124次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420063次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191371次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183336次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81583次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73814次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論