 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
介紹
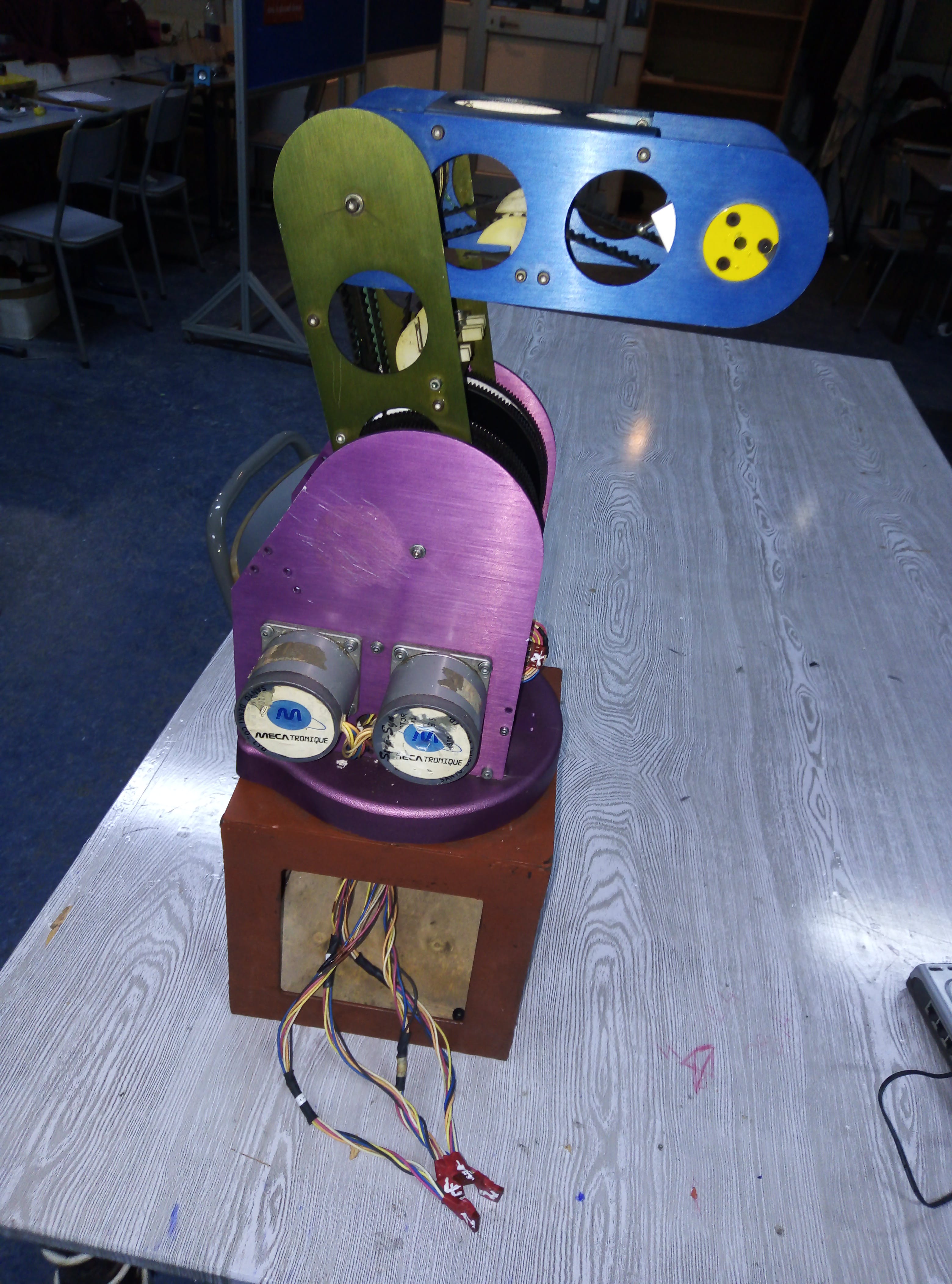
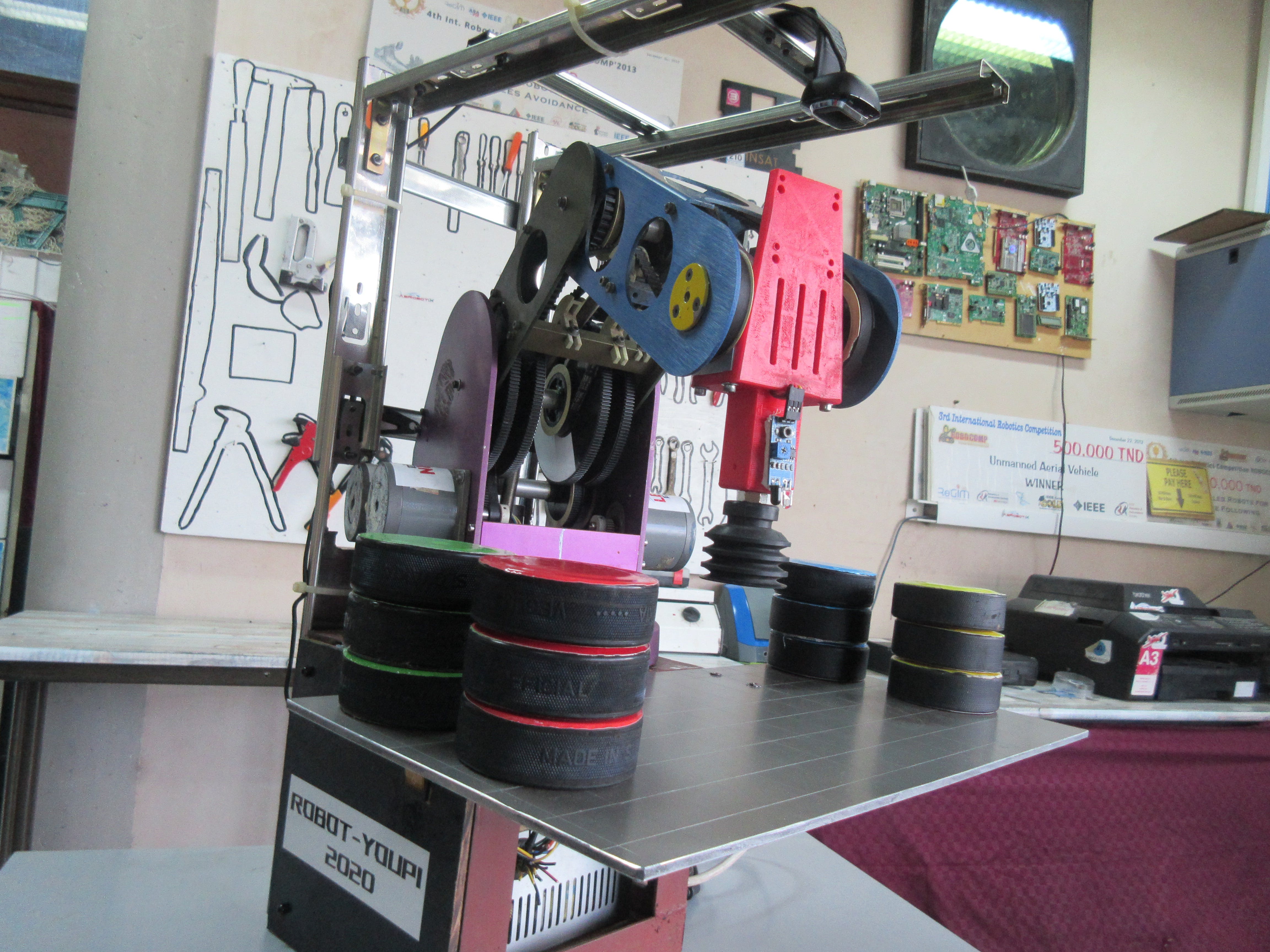
當(dāng)我在我們的機(jī)器人俱樂部AeRobotix INSAT中發(fā)現(xiàn)一個(gè)舊機(jī)械臂時(shí),這個(gè)項(xiàng)目的想法就開始了。它的情況不是很好,因?yàn)樗呀?jīng)閑置多年,被遺棄了。這個(gè)機(jī)器人的名字叫優(yōu)比機(jī)器人。
該項(xiàng)目的主要思想是構(gòu)建一個(gè)自動(dòng)機(jī)械臂來分類彩色物體。它會(huì)將它們放置在每種顏色的預(yù)定義區(qū)域中。該手臂將基于實(shí)時(shí)操作系統(tǒng)FreeRTOS 運(yùn)行。 在實(shí)際工業(yè)應(yīng)用中,機(jī)械臂可用于焊接、物料搬運(yùn)、熱噴涂、噴漆和鉆孔等多種用途。
機(jī)械 DIY
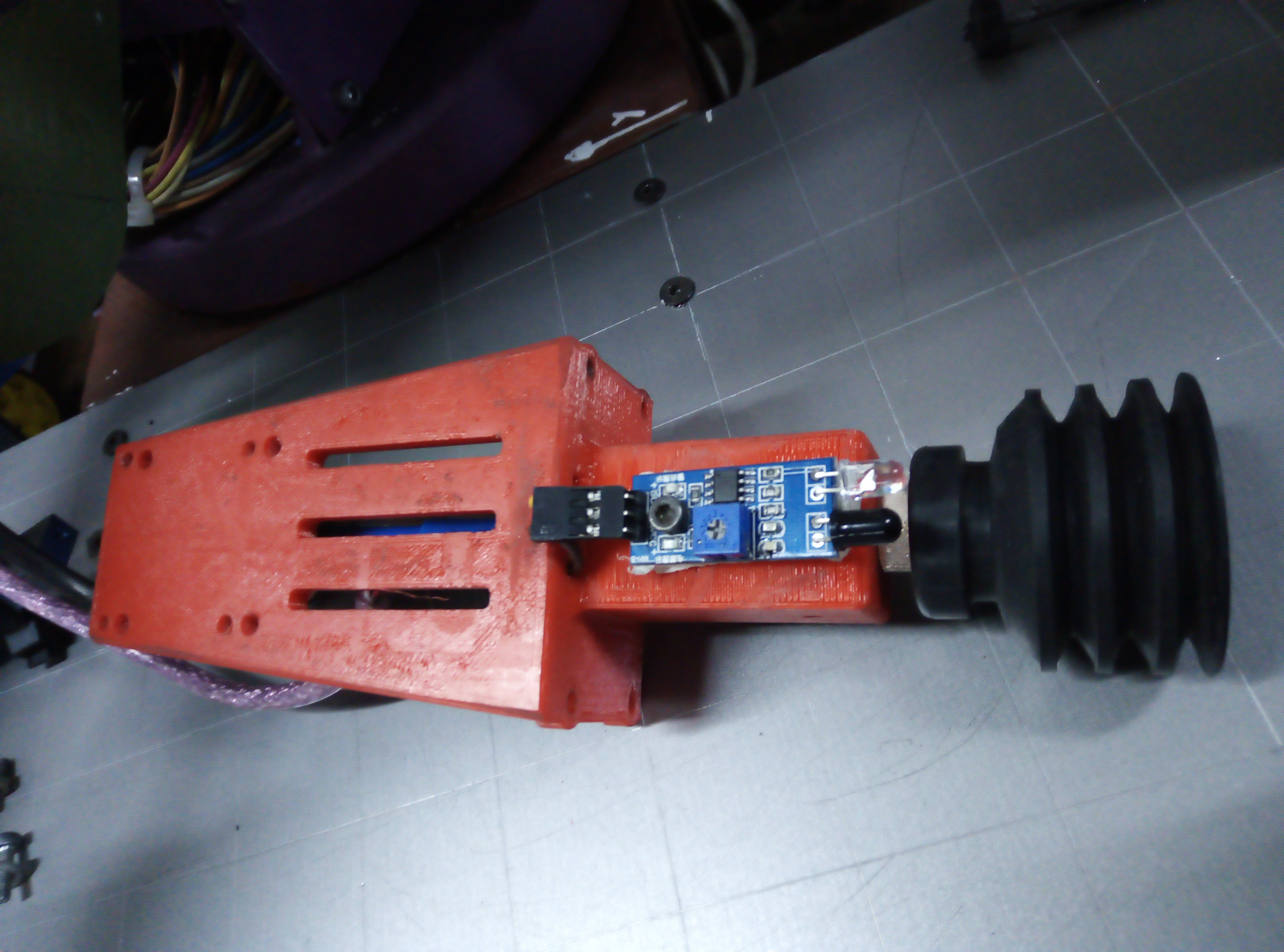
在項(xiàng)目開始時(shí),一些部件損壞嚴(yán)重。這就是為什么我更換了一些部件,例如損壞的齒輪和阻塞的步進(jìn)電機(jī)。然后,我引入了一些潤滑液,以改善一些傳動(dòng)裝置和機(jī)械連接。不幸的是,效應(yīng)器的狀況也很糟糕,不得不更換。
?
電源和步進(jìn)驅(qū)動(dòng)器
為了給這個(gè)機(jī)械臂供電,我使用了 ATX 電源,因?yàn)樗梢詾椴竭M(jìn)電機(jī)產(chǎn)生 24V 直流電,為真空泵產(chǎn)生 12V 直流電,因此足以滿足此應(yīng)用的需求。此外,它體積小,非常適合固定在手臂下。

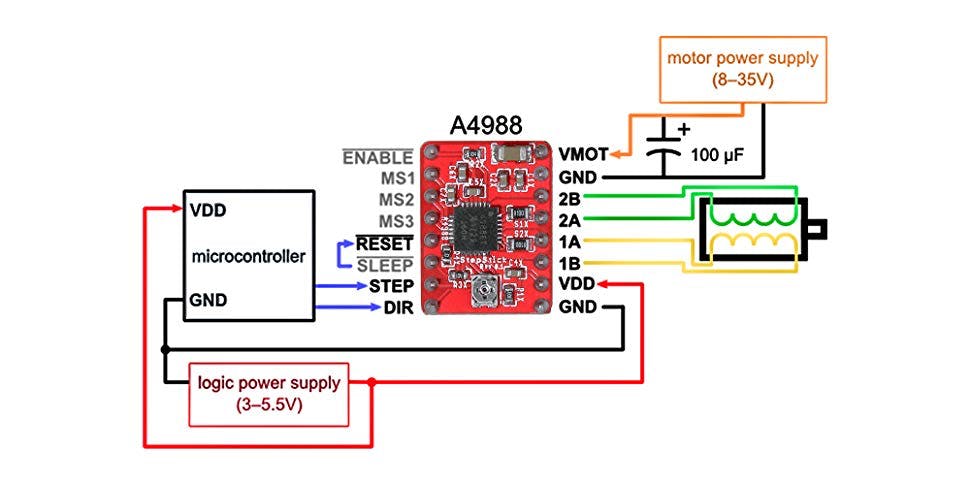
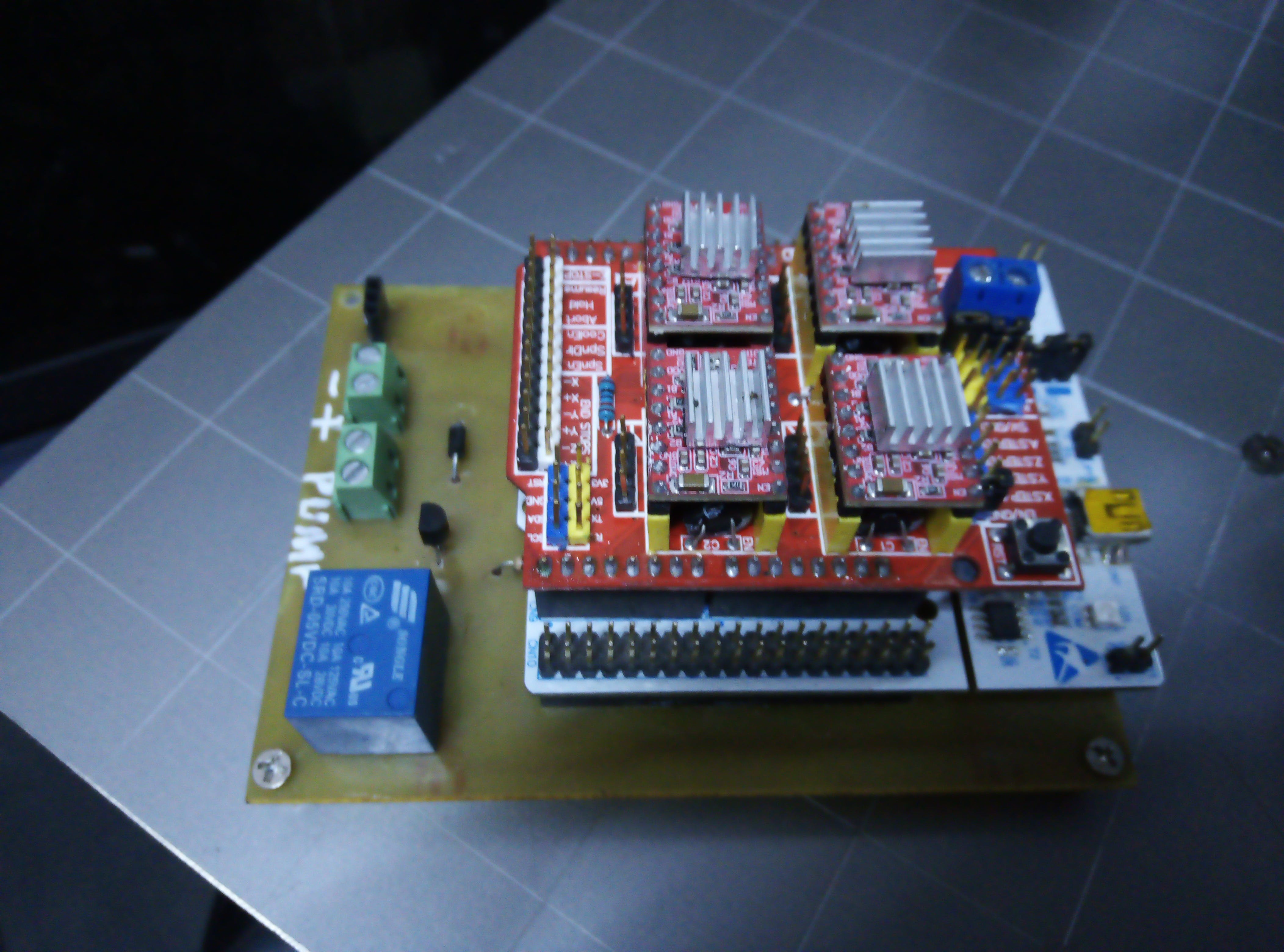
同時(shí),在我對合適的步進(jìn)驅(qū)動(dòng)器的研究中,A4988 步進(jìn)驅(qū)動(dòng)器考慮到它的小尺寸和便宜的價(jià)格是一個(gè)不錯(cuò)的選擇。另外,為了減少電路的擁堵,我使用了CNC shield V3。
?控制電路
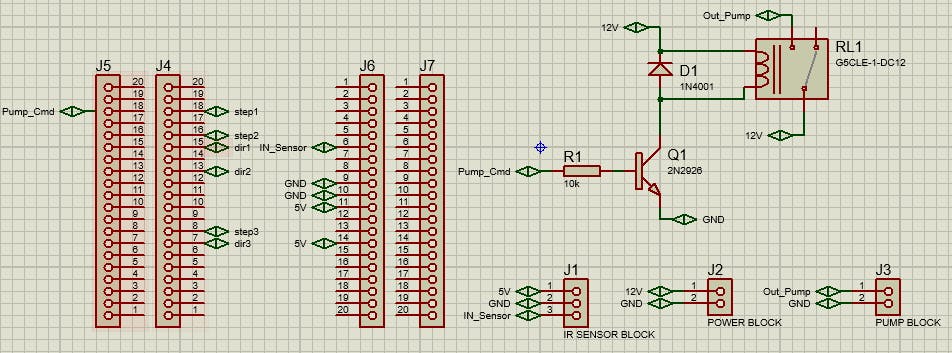
為了減少布線并使項(xiàng)目更有條理,我使用ISIS Proteus 設(shè)計(jì)了一個(gè)簡單的電路。 它包含一個(gè)為真空泵提供必要電流的繼電器驅(qū)動(dòng)電路和一個(gè)檢查有色物體是否存在的紅外物體傳感器。此外,步進(jìn)電機(jī)連接直接與 CNC shield V3 建立。
電路原理圖:
打印設(shè)計(jì)、焊接組件并測試全部功能后:
效應(yīng)器
不幸的是,原來的機(jī)器人效應(yīng)器嚴(yán)重受損。因此,我決定使用Solidworks創(chuàng)建自己的效應(yīng)器。它使用帶有真空泵和適當(dāng)排氣裝置的氣動(dòng)能量。
圖像處理
在這部分項(xiàng)目中,我使用了計(jì)算機(jī)視覺庫 Open -CV來檢測彩色物體并確定它們的坐標(biāo)。該程序?qū)⒃谖业?a target='_blank' class='arckwlink_none'>電腦上運(yùn)行,并從網(wǎng)絡(luò)攝像頭(攝像頭固定在手臂頂部)獲取數(shù)據(jù)幀。然后,它將分析這些幀并檢查定義半徑內(nèi)的對象。優(yōu)先順序是(從前到后):

當(dāng)檢測到物體時(shí),它只需將其坐標(biāo)和顏色發(fā)送到 STM32 微控制器。然后,手臂的主程序會(huì)將這些坐標(biāo)轉(zhuǎn)換到機(jī)器人的真實(shí)坐標(biāo)系中。
您可以Object_Sorting.py在下面的代碼部分或我的 GitHub 存儲(chǔ)庫中找到該程序:https ://github.com/AlaHammouda/Robotic-Arm-Project 。
我使用庫中的范圍檢測器腳本imutils 來修復(fù) HSV 顏色空間中的下邊界和上邊界。
測試演示:
主要程序:
在金字塔的頂端,我使用STM32F410RB NUCLEO 板對手臂進(jìn)行了編程。關(guān)于同時(shí)控制步進(jìn)電機(jī)的必要性,我發(fā)現(xiàn)實(shí)時(shí)操作系統(tǒng)不僅效率更高,而且可以讓您將復(fù)雜的問題分解成更簡單的部分。因此,您可以專注于每個(gè)任務(wù)的開發(fā),而不是在事情運(yùn)行時(shí)進(jìn)行調(diào)度。FreeRTOS是一個(gè)免費(fèi)的實(shí)時(shí)嵌入式操作系統(tǒng)。它是專業(yè)開發(fā)的,嚴(yán)格的質(zhì)量控制,強(qiáng)大和支持。它也可用于許多流行的微控制器,包括STM32 。
- 理論研究:
為了確定效應(yīng)器任意(x,y,z)坐標(biāo)的具體關(guān)節(jié)角度(θ1,θ2,θ3,θ4),因?yàn)樗旧鲜浅绦蛑斜夭豢缮俚牟僮鳎晕耶嬃艘粋€(gè)簡化的方案:
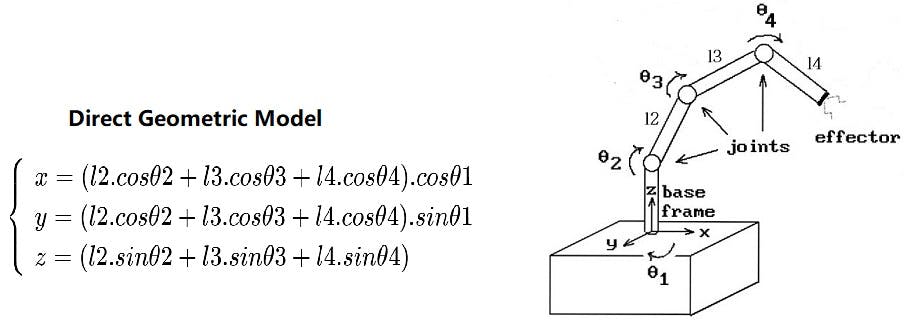
這個(gè)方程組的求解非常復(fù)雜,會(huì)導(dǎo)致我們找到無數(shù)個(gè)解。因此,我決定通過固定角度 θ4= -π/2 rad 來簡化它們:
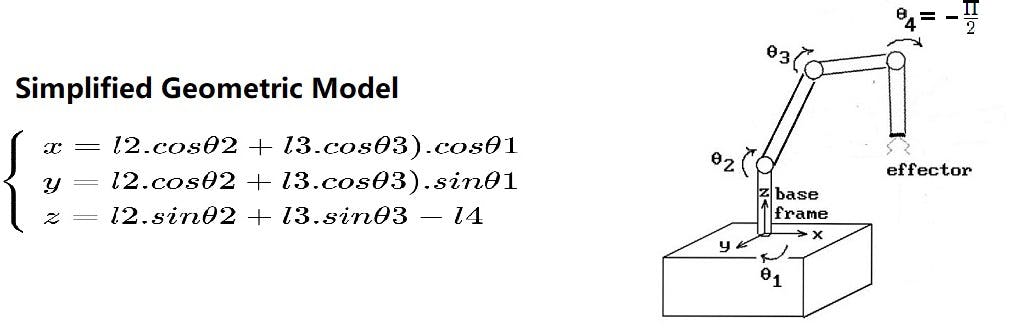
現(xiàn)在,系統(tǒng)的分辨率會(huì)給我們兩種解決方案。我選擇了其中 (θ2>θ3) 的那個(gè),因?yàn)樗m合手臂,也更方便:
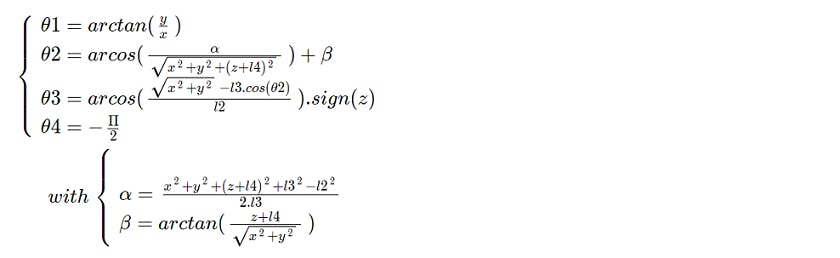
此解決方案僅通過以下方式確定和測試:

- 代碼實(shí)現(xiàn):
在STM32CubeMx中修復(fù)微控制器的配置并在Keil uVision IDE中生成設(shè)置代碼后,代碼的實(shí)現(xiàn)是唯一剩下的事情。
該程序的總體思路非常簡單,它只是在FreeRTOS 中運(yùn)行四個(gè)任務(wù):其中三個(gè)是管理步進(jìn)電機(jī),第四個(gè)是處理手臂每種狀態(tài)下的特定操作。
為了確保與對象的實(shí)時(shí)交互,與我的計(jì)算機(jī)的通信是使用 UART 中斷建立的。
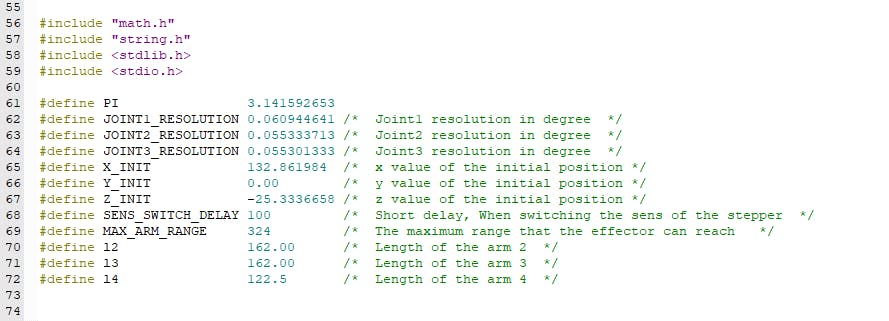
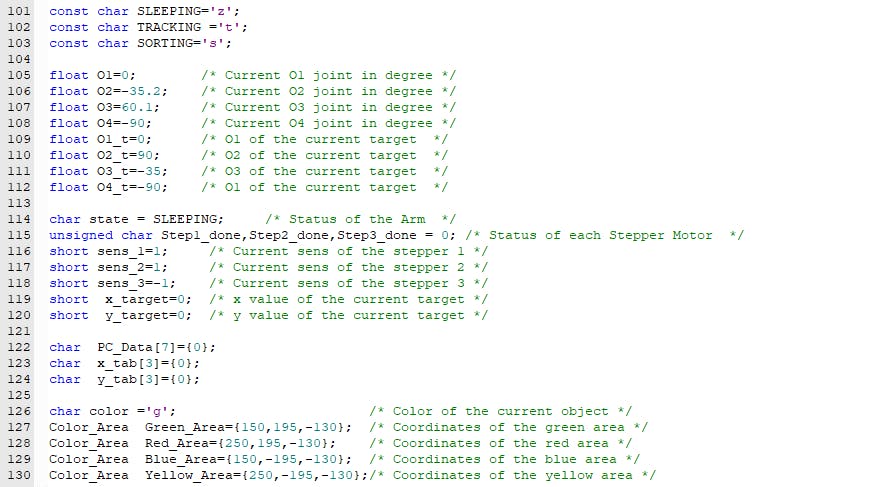
包括庫和聲明變量: main.c(56)
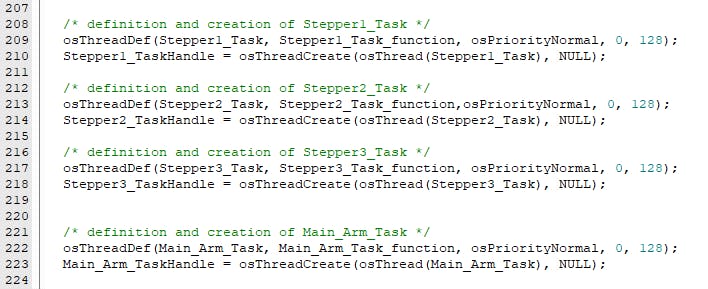
任務(wù)的定義和創(chuàng)建: main.c(208)
啟動(dòng) RTOS 調(diào)度程序:main.c(233)

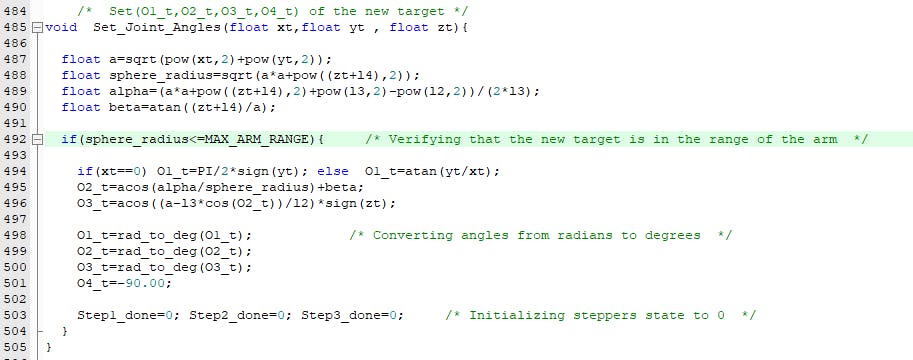
實(shí)施 Set_Joint_Angles():此函數(shù)會(huì)將 (x, y, z) 命令坐標(biāo)轉(zhuǎn)換為 (θ1, θ2, θ3, θ4) 關(guān)節(jié)角度,正如我們在上一節(jié)中解釋的那樣:main.c(485)
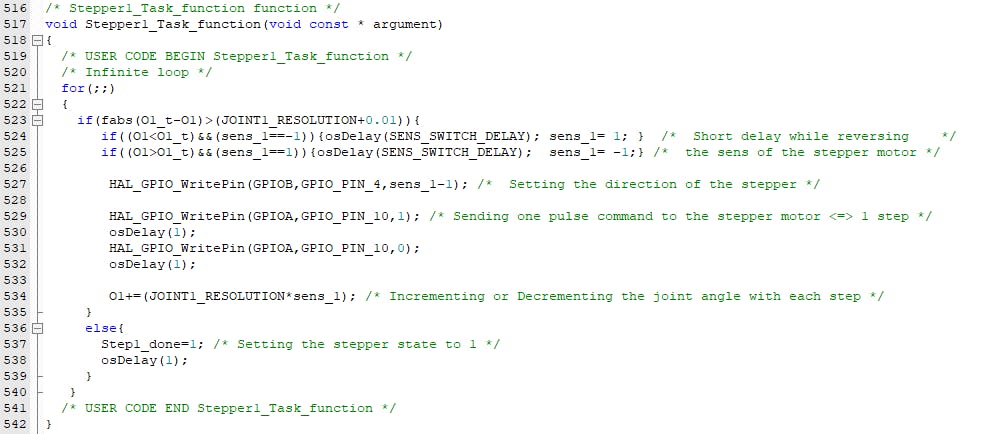
實(shí)施 Stepper1_Task_function():此函數(shù)將處理 Joint1 的旋轉(zhuǎn)。Stepper2_Task_function( ) 和 Stepper3_Task_function( ) 中的代碼相同main.c(516)
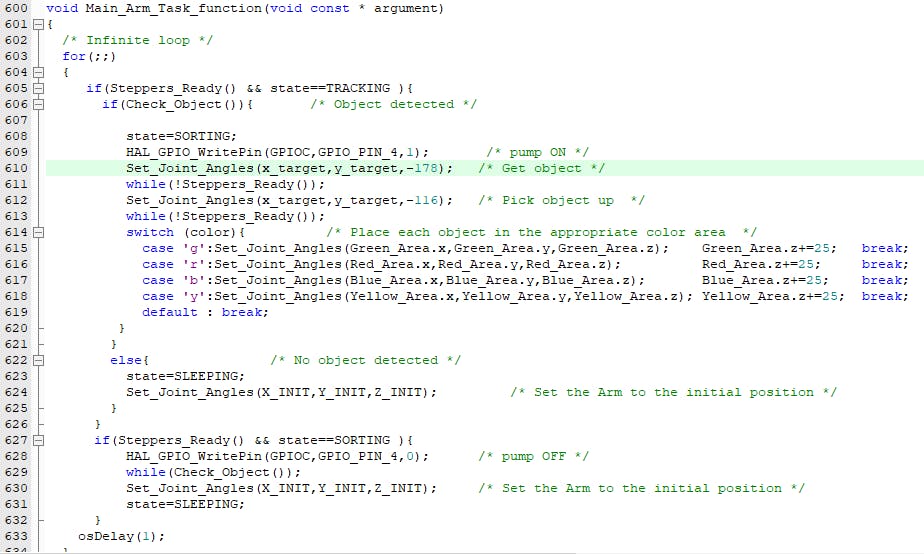
實(shí)施 Main_Arm_Task_function():此函數(shù)將處理手臂的狀態(tài)和每種情況下的適當(dāng)操作:main.c(600)
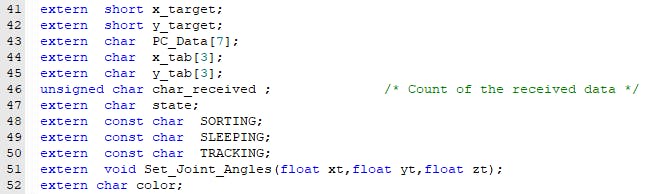
在中聲明變量stm32f4xx_it.c(41):
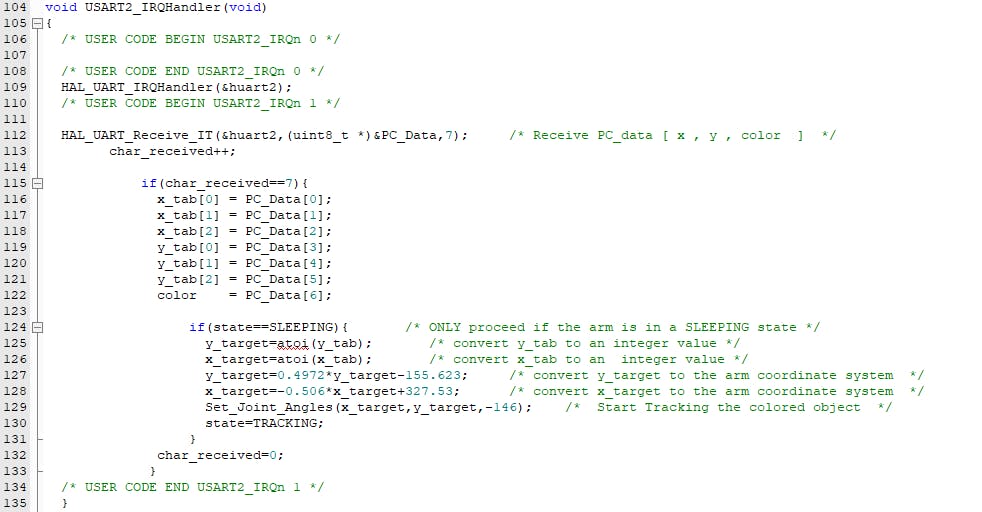
接收和處理 UART 中斷的數(shù)據(jù):stm32f4xx_it.c(104)
您可以在下面的代碼部分找到這些文件(main.c、stm32f4xx_it.c) 。完整的程序項(xiàng)目(Keil μVision + STM32cubeMX 文件)可在我的 GitHub 存儲(chǔ)庫中找到:https ://github.com/AlaHammouda/Robotic-Arm-Project 。
測試主程序:
最后
在完成我的工程研究之前,這個(gè)項(xiàng)目是一次很棒的經(jīng)歷。我應(yīng)用了我在學(xué)習(xí)期間或課外活動(dòng)中獲得的大量知識。我還學(xué)到了很多新技能,尤其是在計(jì)算機(jī)視覺和嵌入式系統(tǒng)編程方面。
最后,我要感謝并感謝我的好家人AeRobotix INSAT ,感謝我從中學(xué)到的一切以及對這個(gè)項(xiàng)目的支持。
如果您需要更多信息,請隨時(shí)與我聯(lián)系:[email protected]
?
- Bracc.ino機(jī)械臂開源分享
- 開源硬件-警燈
- AirBits開源硬件
- Python控制的機(jī)械臂開源分享
- 閃爍的LED開源硬件
- 人臂控制機(jī)械臂開源
- 智能積木開源硬件
- 音箱開源硬件分享
- 無線機(jī)械臂開源硬件
- HBus開源硬件
- 門鈴開源硬件
- Arduino手表開源硬件
- 操縱桿控制的機(jī)械臂開源硬件
- 基于Arduino硬件光控?zé)糁谱髻Y料 7次下載
- 主流的開源硬件有哪些詳細(xì)資料說明
- 使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站 89次閱讀
- 深度解析!RK3568 加持機(jī)械臂是如何實(shí)現(xiàn)顏色識別與抓取的? 67次閱讀
- 基于六維力傳感器的機(jī)械臂自動(dòng)裝配應(yīng)用 834次閱讀
- 【開源獲獎(jiǎng)案例】四軸機(jī)械臂控制系統(tǒng) 1319次閱讀
- 用小安派開源硬件制作一個(gè)桌面天氣站 1007次閱讀
- 基于深度強(qiáng)化學(xué)習(xí)的視覺反饋機(jī)械臂抓取系統(tǒng) 2473次閱讀
- 尋找開源硬件成功的觸發(fā)器 755次閱讀
- dfrobotArduino開發(fā)實(shí)戰(zhàn)-遙控機(jī)械臂套裝簡介 2531次閱讀
- 源創(chuàng)通信BPI-M1+ 開源硬件開發(fā)板介紹 2811次閱讀
- MATLAB機(jī)械臂的兩種路徑規(guī)劃 9167次閱讀
- 全球首款輕量級機(jī)械臂已經(jīng)出現(xiàn)了! 7535次閱讀
- 三大主流開源硬件對比:Arduino vs BeagleBone vs Raspberry Pi 6657次閱讀
- 工業(yè)機(jī)器人常用材料分析:機(jī)械臂材料與常用傳感器 2.6w次閱讀
- 基于MicroZed的五軸自動(dòng)化機(jī)械臂Dexter 3443次閱讀
- 開源硬件究竟有多“Open”?看完這個(gè)你就清楚了 7124次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DD3118電路圖紙資料
- 0.08 MB | 1次下載 | 免費(fèi)
- 2AD庫封裝庫安裝教程
- 0.49 MB | 1次下載 | 免費(fèi)
- 3PC6206 300mA低功耗低壓差線性穩(wěn)壓器中文資料
- 1.12 MB | 1次下載 | 免費(fèi)
- 4網(wǎng)絡(luò)安全從業(yè)者入門指南
- 2.91 MB | 1次下載 | 免費(fèi)
- 5DS-CS3A P00-CN-V3
- 618.05 KB | 1次下載 | 免費(fèi)
- 6海川SM5701規(guī)格書
- 1.48 MB | 次下載 | 免費(fèi)
- 7H20PR5電磁爐IGBT功率管規(guī)格書
- 1.68 MB | 次下載 | 1 積分
- 8IP防護(hù)等級說明
- 0.08 MB | 次下載 | 免費(fèi)
本月
- 1貼片三極管上的印字與真實(shí)名稱的對照表詳細(xì)說明
- 0.50 MB | 103次下載 | 1 積分
- 2涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 89次下載 | 1 積分
- 3錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 43次下載 | 1 積分
- 4錦銳CA51F005 SDK開發(fā)包
- 19.47 MB | 19次下載 | 1 積分
- 5PCB的EMC設(shè)計(jì)指南
- 2.47 MB | 16次下載 | 1 積分
- 6HC05藍(lán)牙原理圖加PCB
- 15.76 MB | 13次下載 | 1 積分
- 7802.11_Wireless_Networks
- 4.17 MB | 12次下載 | 免費(fèi)
- 8蘋果iphone 11電路原理圖
- 4.98 MB | 6次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191390次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65989次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論