 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
在上一篇文章中,您了解了使用 Arduino 的基于 RFID 和鍵盤的門鎖和警報系統(tǒng),其中用戶必須掃描正確的標(biāo)簽并輸入正確的密碼才能打開門鎖,系統(tǒng)還會向我們發(fā)送確認(rèn)消息。
在這篇文章中,您將了解如何使用 Arduino 構(gòu)建基于 RFID 的訪問控制系統(tǒng)。系統(tǒng)只允許掃描正確的標(biāo)簽和掃描錯誤的標(biāo)簽,系統(tǒng)將拒絕訪問,并且蜂鳴器會發(fā)出嗶嗶聲。將有一個主標(biāo)簽用于添加/刪除其他標(biāo)簽。
模塊斷電后保存的標(biāo)簽仍會保留。重置系統(tǒng)的唯一方法是使用擦除按鈕,該按鈕將擦除 EEPROM 中的所有數(shù)據(jù)。EEPROM 大約有 100, 000 個有限的寫入周期。
這是 RFID Arduino 系列的第四篇文章。RFID Arduino系列所有文章如下
- RFID 基礎(chǔ)知識和與 Arduino 連接的 RFID 模塊
- 使用 Arduino 的基于 RFID 和鍵盤的門鎖
- 使用 Arduino 的基于 RFID 和鍵盤的門鎖和警報系統(tǒng)
- 使用 Arduino 的基于 RFID 的訪問控制系統(tǒng)
- 使用 Arduino 的基于 RFID 的訪問控制和警報系統(tǒng)
- 使用 Arduino 的基于 RFID 和鍵盤的訪問控制
- 使用 Arduino 的基于 RFID 和鍵盤的訪問控制和警報系統(tǒng)
使用Arduino的基于RFID的訪問控制系統(tǒng)的工作
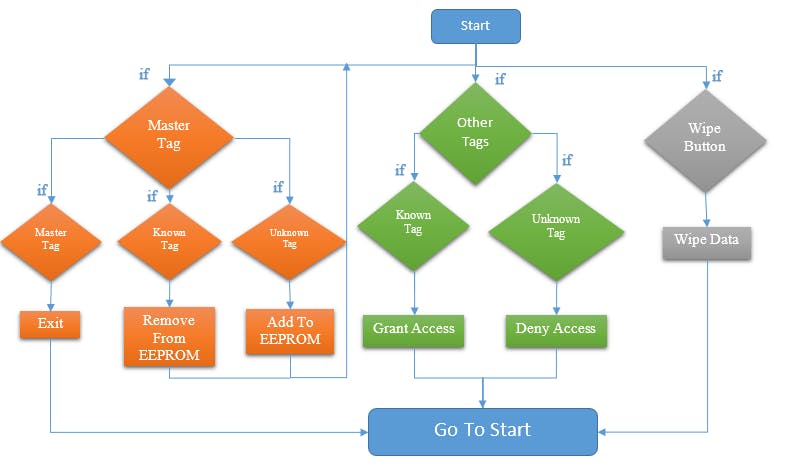
第一次啟動項目時,它會要求您定義一個主標(biāo)簽,您將掃描的任何標(biāo)簽都將是您的主標(biāo)簽。主標(biāo)簽將充當(dāng)程序員,您可以使用它來添加或刪除其他標(biāo)簽。
定義主標(biāo)簽后,您必須添加可用于開門的其他標(biāo)簽。為此,請掃描主標(biāo)簽,它將使系統(tǒng)進(jìn)入程序模式。
在程序模式下,掃描標(biāo)簽將從系統(tǒng)中添加/刪除這些標(biāo)簽。掃描您想用來開門的標(biāo)簽,系統(tǒng)會將這些標(biāo)簽的 UID 存儲在 EEPROM 中。再次掃描標(biāo)簽以將其從 EEPROM 中移除。要退出編程模式,請掃描主標(biāo)簽。
現(xiàn)在掃描您在系統(tǒng)中添加的標(biāo)簽以打開門,掃描錯誤的標(biāo)簽時,門將保持關(guān)閉狀態(tài)。
要重置系統(tǒng),請按 Arduino 的重置按鈕,然后長按擦除按鈕 10 秒。這將從 EEPROM 中刪除所有數(shù)據(jù),包括主標(biāo)簽。
電路圖及說明
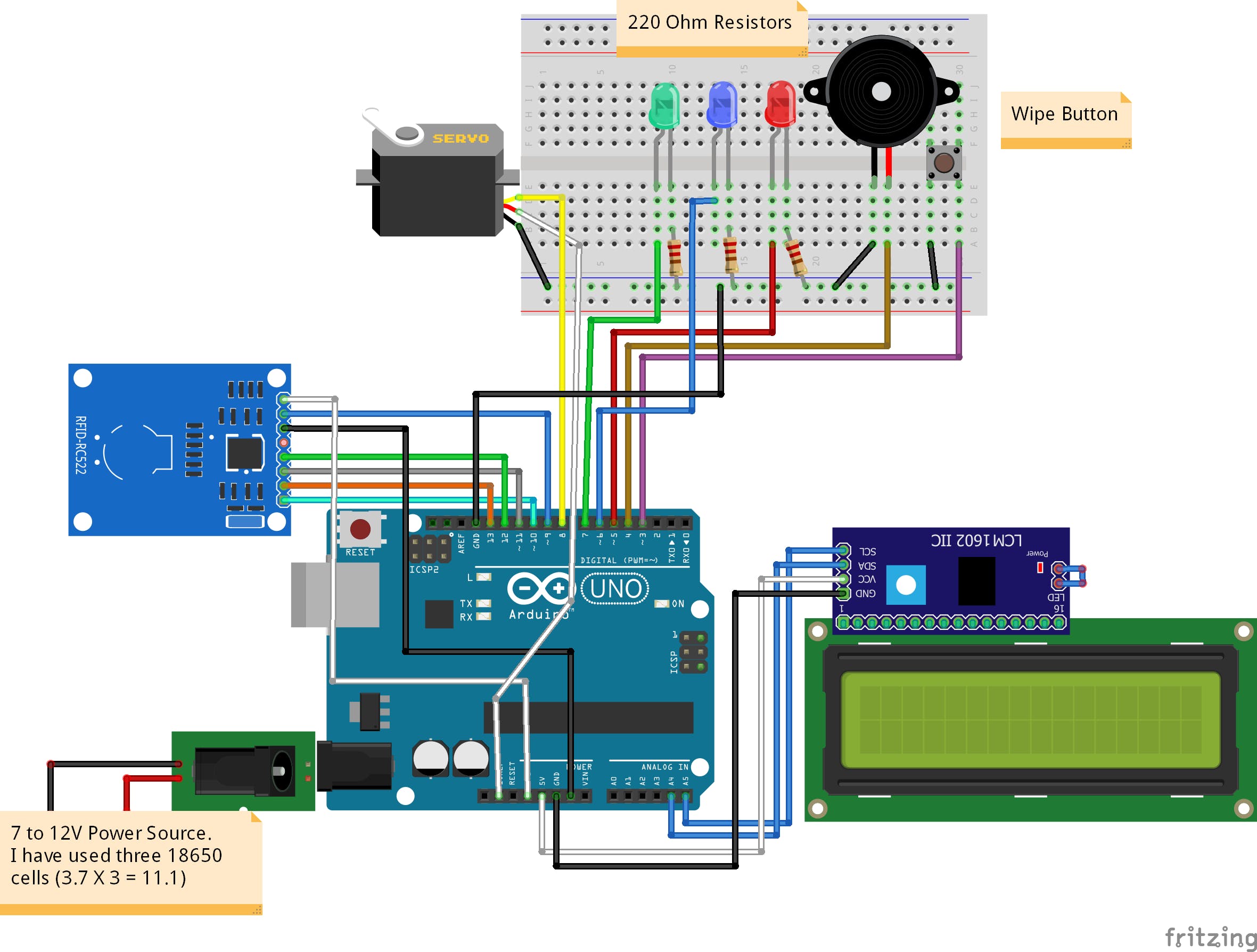
RFID 閱讀器通過 SPI 協(xié)議與 Arduino 通信,不同的 Arduino 板具有不同的 SPI 引腳。
要測試 RFID 閱讀器是否正常工作,請上傳 Arduino 中示例中的“dumpinfo”,看看它是否在串行監(jiān)視器上顯示標(biāo)簽的信息。如果您是 RFID 新手,請遵循本教程 | RFID 基礎(chǔ)知識和與 Arduino 連接的 RFID 模塊
I2C LCD 通過 I2C 協(xié)議與 Arduino 通信。不同的 Arduino 板具有不同的 I2C 引腳。Arduino Uno 和 Arduino Nano 上的 I2C 引腳是 A4、A5。
之后,將 Arduino 與伺服、LED、蜂鳴器和按鈕連接起來。
最后,將電源連接到 Arduino。我用了三個 18650 電池。我們可以通過筒形千斤頂給 Arduino 提供 6 到 12V 的電壓。
使用Arduino的基于RFID的訪問控制系統(tǒng)的完整電路圖如下
?
?
代碼
下面的代碼是 Miguel Balboa 編寫的庫中示例草圖的修改版本。圖書館的鏈接如下
https://github.com/miguelbalboa/rfid
使用Arduino的基于RFID的訪問控制系統(tǒng)的完整代碼如下
#include // We are going to read and write Tag's UIDs from/to EEPROM
#include
?
?
- Arduino球和光束控制系統(tǒng)
- 如何制作RFID Arduino門禁系統(tǒng)
- 使用Arduino基于RFID的考勤系統(tǒng)
- 使用Arduino的基于RFID的考勤系統(tǒng)
- 基于RFID的訪問控制和監(jiān)控系統(tǒng)
- 基于RFID的創(chuàng)客空間訪問控制系統(tǒng)
- 會說話的RFID自行車控制系統(tǒng)
- 電力拖動自動控制系統(tǒng)之運(yùn)動控制系統(tǒng)電子版 0次下載
- 基于DSP的攤鋪機(jī)行駛控制系統(tǒng) 9次下載
- 基于區(qū)塊鏈的物聯(lián)網(wǎng)訪問控制系統(tǒng) 45次下載
- DDC控制系統(tǒng)和PLC控制系統(tǒng)對比和應(yīng)用 12次下載
- 基于XACML訪問控制系統(tǒng)設(shè)計 4次下載
- 基于Arduino的移動機(jī)器人控制系統(tǒng)設(shè)計_彭攀來 5次下載
- 基于組件的訪問控制系統(tǒng)快速開發(fā)方法
- 安全訪問控制系統(tǒng)的設(shè)計和實現(xiàn)
- 現(xiàn)場總線控制系統(tǒng)與集散控制系統(tǒng)的對比 2263次閱讀
- 前饋控制系統(tǒng)與反饋控制系統(tǒng)的區(qū)別 4214次閱讀
- 開環(huán)控制系統(tǒng)與閉環(huán)控制系統(tǒng)的區(qū)別 1w次閱讀
- PLC控制系統(tǒng)與繼電器控制系統(tǒng)的比較 3155次閱讀
- 伺服控制系統(tǒng)與變頻控制系統(tǒng)的比較 1256次閱讀
- plc控制系統(tǒng)與傳統(tǒng)繼電器控制區(qū)別 plc控制系統(tǒng)的優(yōu)點 3737次閱讀
- 智能控制系統(tǒng)的主要類型有哪些? 3300次閱讀
- DCS控制系統(tǒng)是什么?DCS控制系統(tǒng)的特點 4127次閱讀
- 如何使用Arduino創(chuàng)建停車門禁控制系統(tǒng)? 5302次閱讀
- 基于 RFID 和 ARM 架構(gòu)的醫(yī)療器械智能控制系統(tǒng) 1198次閱讀
- 機(jī)器人控制系統(tǒng)分類_機(jī)器人控制系統(tǒng)有哪些 2.6w次閱讀
- 微機(jī)控制系統(tǒng)的分類 4767次閱讀
- PID是控制系統(tǒng)嗎?控制系統(tǒng)由什么組成? 1w次閱讀
- 機(jī)器人控制系統(tǒng)概念!機(jī)器人控制系統(tǒng)的基本要求 9898次閱讀
- DCS系統(tǒng)基礎(chǔ)知識,DCS控制系統(tǒng)和PLC控制系統(tǒng),你會怎么選擇? 1.8w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論