 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
myCobot 是Elephant Robotics的 6 自由度機(jī)械臂,在協(xié)作機(jī)械臂中擁有最高的性價(jià)比。本文是關(guān)于使用myCobot280-M5Stack 的體驗(yàn)。我將使用python對(duì)其進(jìn)行編程,包括環(huán)境構(gòu)建、代碼測(cè)試和開(kāi)發(fā)。
介紹
顧名思義,這個(gè)機(jī)器人使用 M5Stack 控制器。所以在使用的時(shí)候,我們需要用電腦搭建編譯環(huán)境,我會(huì)用python語(yǔ)言來(lái)做。有一個(gè)名為 pymycobot 的官方庫(kù),我將在 python 中使用它來(lái)操作機(jī)械臂。
環(huán)境建設(shè)
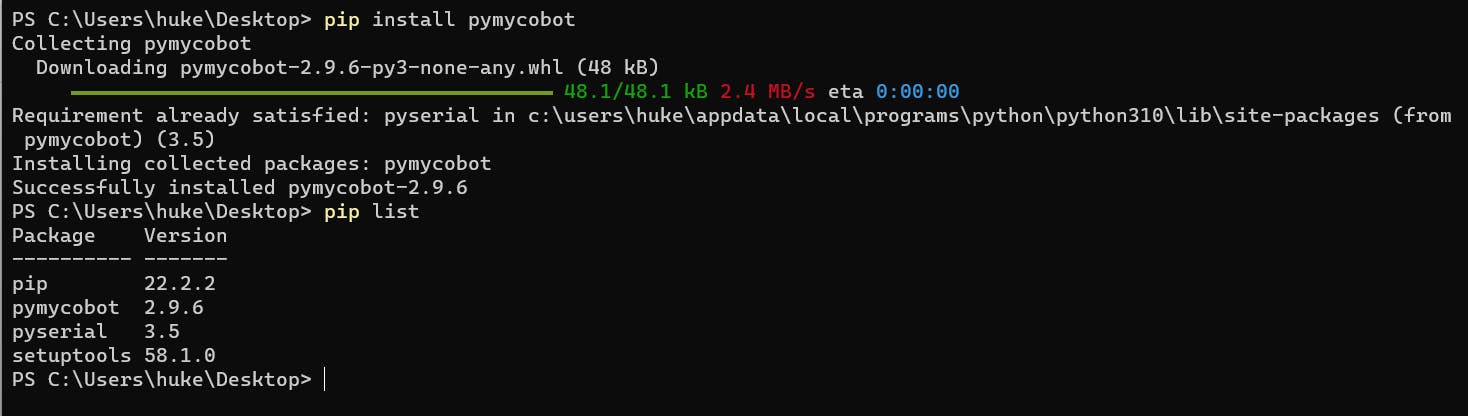
電腦上安裝python環(huán)境,下載pymycobot庫(kù)。提供了兩種方法:
- Elephant Robotics Gitbook上提供了有關(guān)構(gòu)建 python 環(huán)境的更詳細(xì)的教程。
-
在谷歌上搜索相關(guān)教程。安裝好編程環(huán)境后,我們下載驅(qū)動(dòng)庫(kù)。
pip install pymycobot
控制機(jī)械臂
開(kāi)始導(dǎo)入一些 python 庫(kù)。
from pymycobot.mycobot import MyCobot
import time
(1)MyCobot(端口、波特率)
創(chuàng)建一個(gè)與 myCobot 通信的對(duì)象。端口:機(jī)械臂的串行端口。波特:機(jī)械臂的波特率。
#The serial port of my arm is COM7, baud rate 115200.
mc = MyCobot('COM7',115200)
(2)get_angles()
獲取myCobot所有關(guān)節(jié)的角度數(shù)據(jù)。返回值:返回值是一個(gè)包含六個(gè)數(shù)據(jù)元素的列表,對(duì)應(yīng)關(guān)節(jié)1到6。
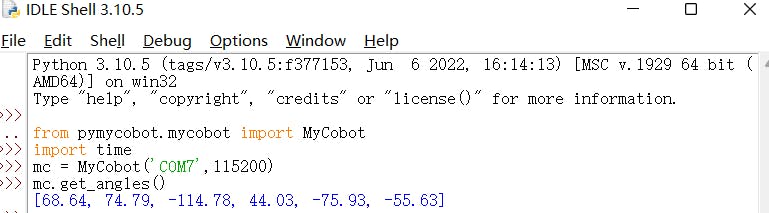
如圖所示,我們可以看到 myCobot 的角度

?
(3)send_angles(度數(shù),速度)
將運(yùn)動(dòng)的角度和速度發(fā)送到所有關(guān)節(jié)。度數(shù):關(guān)節(jié)的角度在-180到180的范圍內(nèi),分別按照1到6個(gè)關(guān)節(jié)的順序存儲(chǔ)在一個(gè)列表中。速度:機(jī)械臂運(yùn)動(dòng)到指定角度時(shí)的速度。mc.send_angles([0,0,0,0,0,0],50)像這樣跑。
?
?
(4)send_angle(ID, DEGREE, SPEED)
將角度和速度發(fā)送到單個(gè)關(guān)節(jié)。Id : 1 到 6 范圍內(nèi)的整數(shù),分別對(duì)應(yīng) 1-6 軸的機(jī)械臂。度數(shù):關(guān)節(jié)的角度在-180到180的范圍內(nèi),分別按照1到6個(gè)關(guān)節(jié)的順序存儲(chǔ)在一個(gè)列表中。速度:機(jī)械臂運(yùn)動(dòng)到指定角度時(shí)的速度。以 50 的速度使關(guān)節(jié)運(yùn)動(dòng)達(dá)到 90 度的位置。mc.send_angle(1,90,50)
(5) release_all_servos()
解鎖機(jī)械臂,使其可以隨意手動(dòng)擺動(dòng)。注意,執(zhí)行這個(gè)命令時(shí),手臂會(huì)因?yàn)橹亓Χ侣洌砸⌒姆乐顾驳狡渌麞|西。mc.release_all_servos()機(jī)械臂被控制時(shí)通電,通過(guò)這個(gè)功能,我們可以擺動(dòng)機(jī)械臂。
?
演示
編寫一個(gè)演示,讓 myCobot280-M5Stack 跳舞。
#!/usr/bin/python3
#-*- coding: UTF-8 -*-
from pymycobot.mycobot import MyCobot
import time
mc = MyCobot('COM7',115200)
mc.send_angles([0,0,0,0,0,0],50)
time.sleep(1)
for count in range(3):
mc.send_angles([87.8,(-51.5),60.9,11.95,(-15.9),(-6.06)],50)
time.sleep(1)
mc.send_angles([87.97,42.01,(-45.26),10.37,(-15.9),(-6.06)],50)
time.sleep(1)
mc.send_angles([19.77,79.36,(-114.34),39.63,(-15.9),(-6.06)],50)
time.sleep(1)
for count2 in range(4):
mc.send_angles([43.24,93.42,(-140.88),48.07,60.64,(-6.06)],50)
time.sleep(1)
mc.send_angles([19.77,79.36,(-114.34),39.63,(-15.9),(-6.06)],50)
time.sleep(1)
?
myCobot280-M5Stack 第一次體驗(yàn)到此結(jié)束。如果你喜歡這篇文章,請(qǐng)給我一個(gè)贊或發(fā)表評(píng)論以支持它。謝謝!
- 基于M5Stick-V和M5Stack的辦公桌機(jī)器人助手
- StickC M5Stack LED閃爍
- M5Stack圣誕雪球開(kāi)源分享
- 帶有M5Stack和Edge Impulse的手勢(shì)控制無(wú)人機(jī)
- 帶M5Stack的工廠監(jiān)控系統(tǒng)
- M5Stack智能植物澆水開(kāi)源項(xiàng)目
- Bareboat Necessities的M5Stack堅(jiān)韌Arduino船展示
- 基于M5Stack的PID控制學(xué)習(xí)平臺(tái)
- 基于M5Stack的抗COVID安全門
- 帶M5Stack的音頻頻譜顯示
- 配備M5Stack的智能工廠
- 使用M5StickC Plus進(jìn)行M5Stack圣誕節(jié)的圣誕老人追蹤器
- 用M5Stack設(shè)備裝飾圣誕樹(shù)
- 用于M5Stack的Arduino大型國(guó)際象棋
- 帶有M5Stack的電報(bào)控制無(wú)人機(jī)
- 使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站 89次閱讀
- 在Mac上使用Docker構(gòu)建noVNC環(huán)境并運(yùn)行MyCobot 81次閱讀
- 一款基于樹(shù)莓派CM4的小型Arm Linux迷你電腦 2591次閱讀
- M5Stack IOT智能門禁系統(tǒng)–基礎(chǔ)篇(Blockly+MQTT) 3611次閱讀
- dfrobotDFRduino Pro Mini控制器簡(jiǎn)介 2200次閱讀
- 新唐科技M031FB0AE控制器 2943次閱讀
- 新唐科技M032KG6AE控制器介紹 1901次閱讀
- 新唐科技M031KG8AE控制器 1866次閱讀
- 新唐科技N567G280控制器介紹 1156次閱讀
- 新唐科技M031SD2AE控制器簡(jiǎn)介 2093次閱讀
- 新唐科技M031SE3AE控制器介紹 2175次閱讀
- 新唐科技N567H280控制器介紹 1720次閱讀
- 新唐科技N567K280控制器介紹 1708次閱讀
- 基于M2M的大型工程類裝備的智能控制器設(shè)計(jì) 1945次閱讀
- 溫度控制器電路圖5 2817次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DD3118電路圖紙資料
- 0.08 MB | 1次下載 | 免費(fèi)
- 2AD庫(kù)封裝庫(kù)安裝教程
- 0.49 MB | 1次下載 | 免費(fèi)
- 3PC6206 300mA低功耗低壓差線性穩(wěn)壓器中文資料
- 1.12 MB | 1次下載 | 免費(fèi)
- 4網(wǎng)絡(luò)安全從業(yè)者入門指南
- 2.91 MB | 1次下載 | 免費(fèi)
- 5DS-CS3A P00-CN-V3
- 618.05 KB | 1次下載 | 免費(fèi)
- 6海川SM5701規(guī)格書(shū)
- 1.48 MB | 次下載 | 免費(fèi)
- 7H20PR5電磁爐IGBT功率管規(guī)格書(shū)
- 1.68 MB | 次下載 | 1 積分
- 8IP防護(hù)等級(jí)說(shuō)明
- 0.08 MB | 次下載 | 免費(fèi)
本月
- 1貼片三極管上的印字與真實(shí)名稱的對(duì)照表詳細(xì)說(shuō)明
- 0.50 MB | 103次下載 | 1 積分
- 2涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 89次下載 | 1 積分
- 3錦銳科技CA51F2 SDK開(kāi)發(fā)包
- 24.06 MB | 43次下載 | 1 積分
- 4錦銳CA51F005 SDK開(kāi)發(fā)包
- 19.47 MB | 19次下載 | 1 積分
- 5PCB的EMC設(shè)計(jì)指南
- 2.47 MB | 16次下載 | 1 積分
- 6HC05藍(lán)牙原理圖加PCB
- 15.76 MB | 13次下載 | 1 積分
- 7802.11_Wireless_Networks
- 4.17 MB | 12次下載 | 免費(fèi)
- 8蘋果iphone 11電路原理圖
- 4.98 MB | 6次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開(kāi)源硬件-PMP21529.1-4 開(kāi)關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191390次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65989次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論