 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
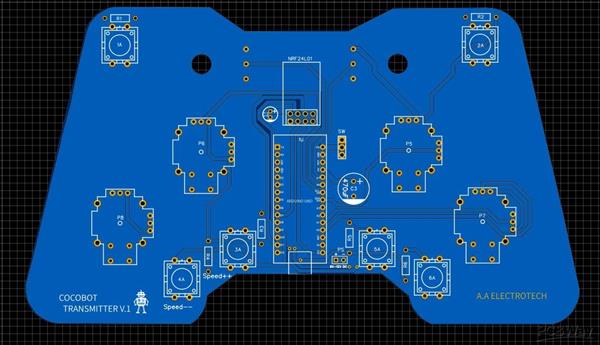
PCB圖如下: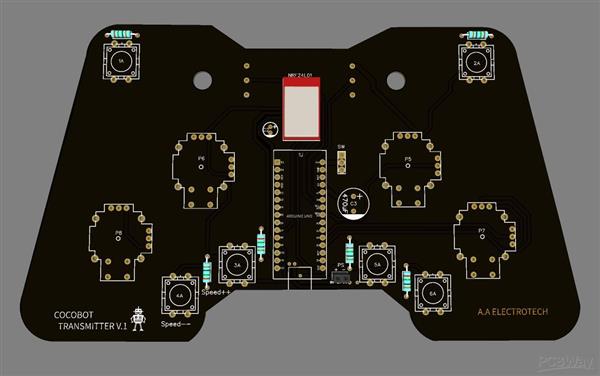
描述
無線椰子收割機(jī) || 基于 Coco-bot Harvester Arduino Nrf24l01
無線電控制/無線 椰子收割機(jī)是一種非常有用的機(jī)器,可以通過爬上椰子樹并收獲椰子果實(shí)來收獲大量椰子果實(shí),而不會危及任何收割機(jī)的健康或生命。無線椰子收割機(jī)基于 Arduino,將使用 C++ 編程語言中的 Arduino Ide 進(jìn)行編程。
無線椰子收割機(jī)分為2(二)部分:發(fā)射器和接收器
發(fā)射板
發(fā)射器板由 2(兩個(gè))3.7V 鋰離子電池(7.4V)供電,所有輸入設(shè)備都連接到該板,

該板的形狀像一個(gè)普通的發(fā)射器。Nrf24l01 收發(fā)器模塊連接到接收器的最遠(yuǎn)距離為 1200 米。菲律賓椰子樹的標(biāo)準(zhǔn)高度為 50 到 60 英尺(15 到 18 米),因此該收發(fā)器模塊的范圍足夠安靜,可以將數(shù)據(jù)從發(fā)射器傳輸?shù)浇邮掌鳌0l(fā)射器板的總功耗小于 1 瓦。

1 操縱桿 - 轉(zhuǎn)動機(jī)構(gòu)
1 操縱桿 - 垂直運(yùn)動
速度調(diào)節(jié)(2 個(gè)按鈕) - 垂直運(yùn)動中的電機(jī)速度
電位器 - 伺服(上下)
電位器 - 伺服(左右)
組件列表:
PCB WAY-印刷電路板X1
Arduino納米X1
Nrf24l01+解放軍 X 1
電位器 X 2
按鈕 X 6
操縱桿 X 4
100uf/16V 電容 X1
470uf/16V 電容 X1
撥動開關(guān)(迷你)X1
10K 歐姆電阻器 X6
2x 3.7V 鋰離子電池座 X1
3.7V鋰離子電池X2
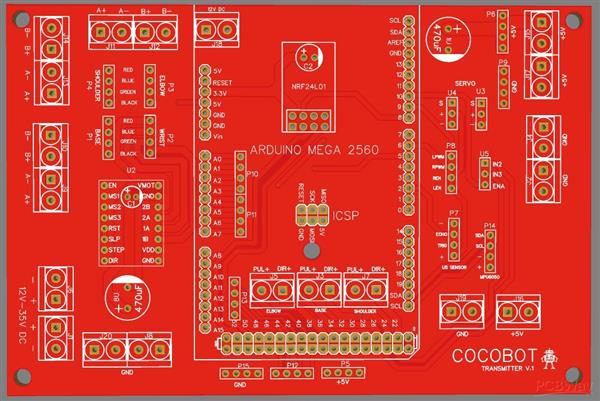
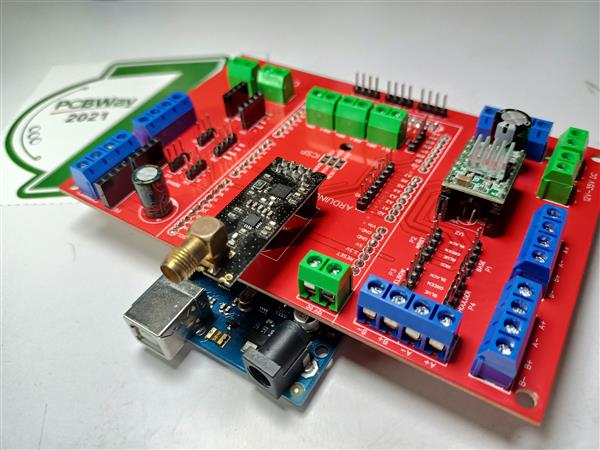
接收板
接收板在視頻中由 19V 電源供電,但在實(shí)際計(jì)劃中,它應(yīng)該由帶 BMS 和有源平衡器的 32650 LIFEPO4A 電池 4s10p 供電。每個(gè)電池的標(biāo)稱電壓為 3.2V,要獲得 12V DC,我需要串聯(lián) 4 塊 32650 電池,以使額定電流翻倍 I 并聯(lián) 10X 4 塊串聯(lián) 32650 LIFEPO4A 電池(4 串 10 并聯(lián))

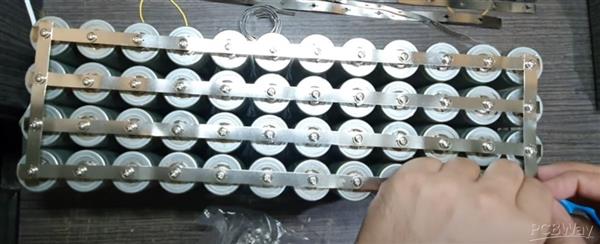
該電池的容量非常高 12V 60AH (720W),因此在所有負(fù)載全部運(yùn)行的情況下,椰子收獲機(jī)可以持續(xù)長達(dá) 2 到 3 個(gè)小時(shí),因?yàn)樨?fù)載的總計(jì)算量幾乎是 300WH (25A),但實(shí)際上,當(dāng)椰子收割機(jī)工作并非所有負(fù)載都在運(yùn)行,因此功耗低于 300 瓦。
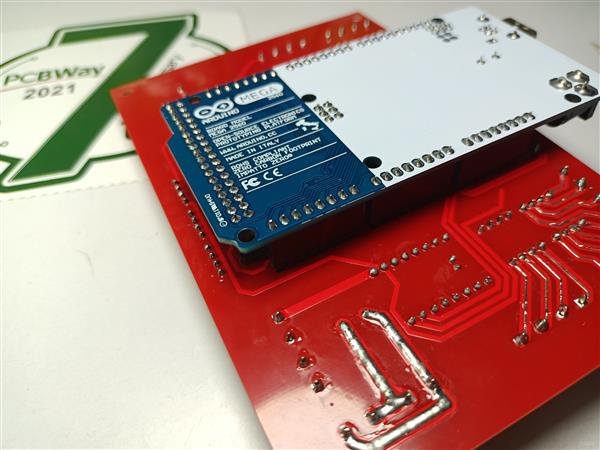
該板的主要大腦是 Arduino Mega 微控制器。
Nrf24l01 + PLA 收發(fā)模塊連接到接收器的最遠(yuǎn)距離為 1200 米。菲律賓椰子樹的標(biāo)準(zhǔn)高度為 50 到 60 英尺(15 到 18 米),因此該收發(fā)器模塊的范圍足夠安靜,可以將數(shù)據(jù)從發(fā)射器傳輸?shù)浇邮掌鳌?/p>

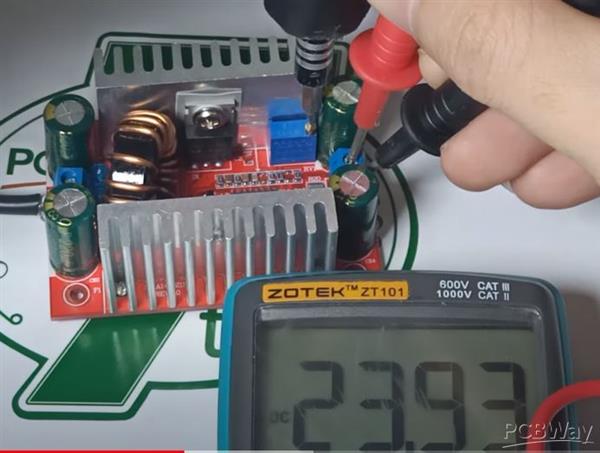
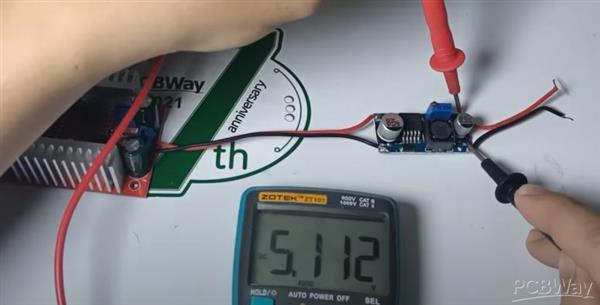
為了給我的 4 臺 Nema 17 步進(jìn)電機(jī)供電,我正在使用 300W 升壓轉(zhuǎn)換器(升壓),我可以選擇更高的電壓以減少流向?qū)Ь€和步進(jìn)線圈繞組的安培馬達(dá)。通過提供更高的電壓(如 24V DC 至 35V DC),步進(jìn)電機(jī)可在運(yùn)行時(shí)減少熱量。當(dāng)電壓很低時(shí),步進(jìn)電機(jī)的加熱速度更快,因?yàn)榘才嘣絹碓礁撸@就是步進(jìn)電機(jī)內(nèi)部的繞組無法處理它的原因。

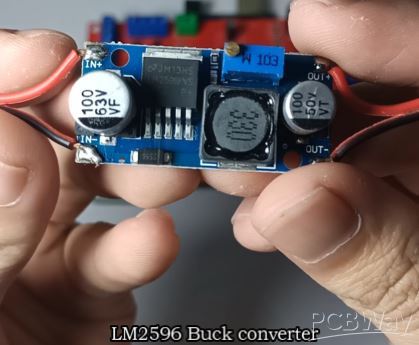
為了給 Arduino 大型微控制器供電,我將一個(gè) LM2596 降壓轉(zhuǎn)換器(降壓)連接到 24.5V DC 的升壓轉(zhuǎn)換器的輸出,以將其轉(zhuǎn)換為 5V DC。我決定使用這個(gè)降壓轉(zhuǎn)換器,因?yàn)樗哂懈哳~定電流 (5A),因此它可以補(bǔ)償 Arduino mega 和 2 個(gè)伺服電機(jī)所需的功率。
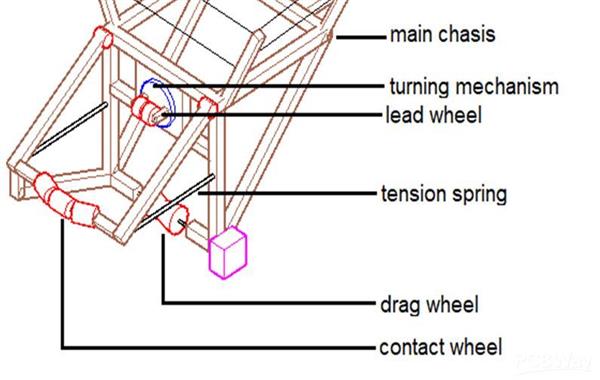
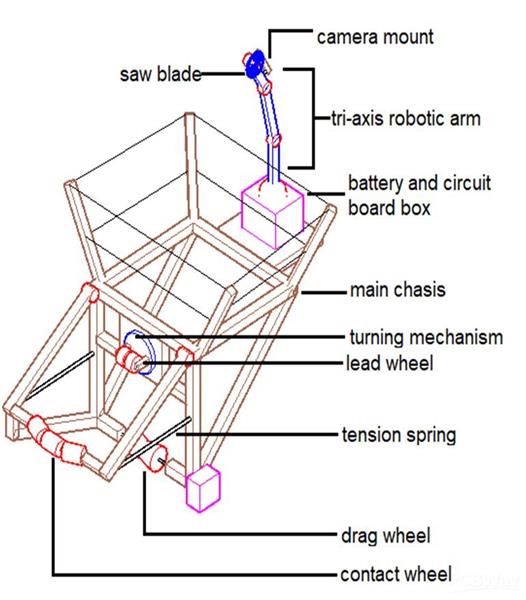
椰子收割機(jī)有不同的部分:垂直運(yùn)動、轉(zhuǎn)動機(jī)構(gòu)、機(jī)械臂、鋸片切割機(jī)。相機(jī)定位。
垂直運(yùn)動
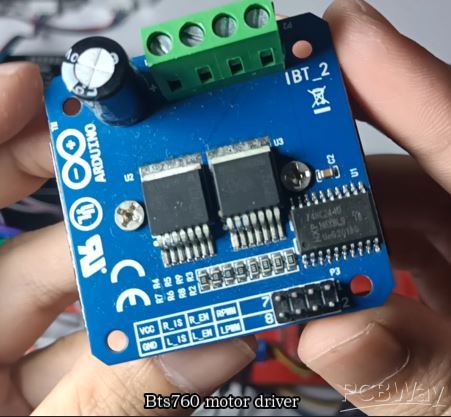
垂直運(yùn)動負(fù)責(zé)機(jī)器對椰子樹的上下運(yùn)動。使用的馬達(dá)是TAKANAWA Dc齒輪馬達(dá)。24V可起重60Kg,電機(jī)驅(qū)動器為BTS760電機(jī)驅(qū)動器。

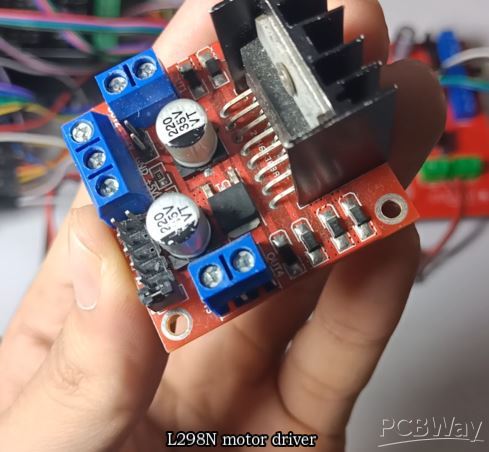
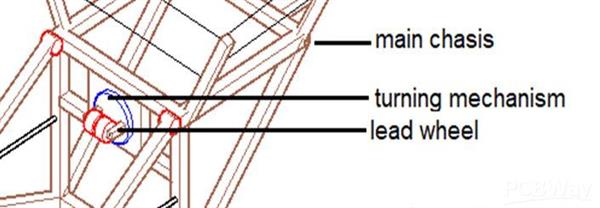
轉(zhuǎn)向機(jī)構(gòu)
轉(zhuǎn)動機(jī)構(gòu)負(fù)責(zé)椰子收獲機(jī)的360度旋轉(zhuǎn),使其在任何位置都可以靈活地輕松收獲椰子果實(shí)。使用的馬達(dá)是TAKANAWA Dc齒輪馬達(dá)。
它在24V時(shí)可以舉起60Kg,電機(jī)驅(qū)動器是L298N電機(jī)驅(qū)動器。

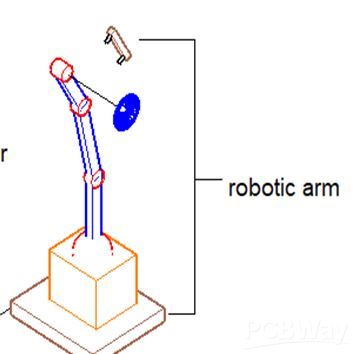
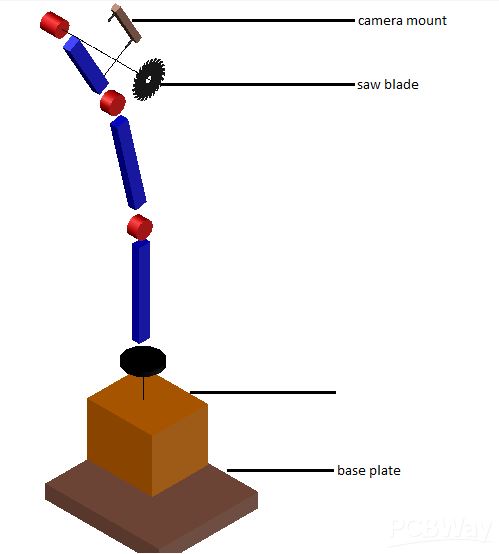
機(jī)械臂
機(jī)械臂由4個(gè)關(guān)節(jié)組成;底座、肩部、肘部和腕部,這 4 個(gè)關(guān)節(jié)由 Nema 17 步進(jìn)電機(jī)中的每一個(gè)控制。用于此的驅(qū)動器是 TB6600 和 A4988 步進(jìn)驅(qū)動器。機(jī)械臂的主機(jī)架計(jì)劃通過 3D 打印制造。機(jī)械臂用于定位鋸片切割機(jī),以準(zhǔn)確切割椰子果實(shí)的莖部以進(jìn)行收獲。


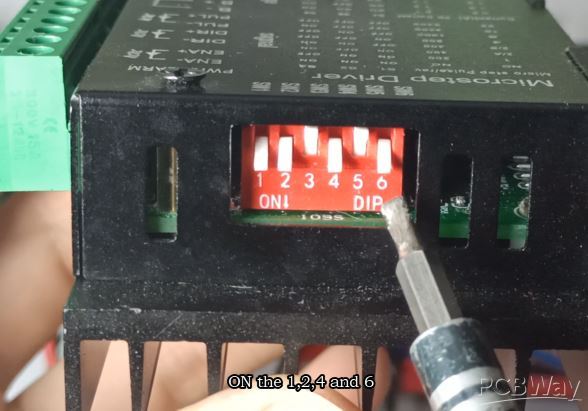
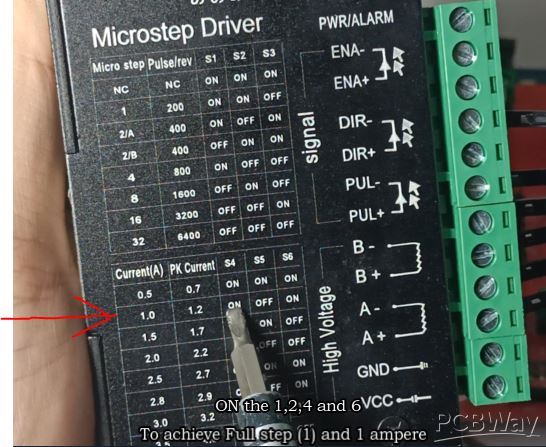
TB6600 步進(jìn)驅(qū)動器

您可以通過設(shè)置連接到驅(qū)動器的 DIP 開關(guān)來實(shí)現(xiàn) NEMA 17 步進(jìn)電機(jī)的步進(jìn),要選擇 FULL STEP 和 1 Ampere 額定值,您應(yīng)該打開 1、2、4 和 6 DIP 開關(guān)。

A4988 用于 NEMA 17 腕關(guān)節(jié)步進(jìn)電機(jī),由于手腕是最后一個(gè)關(guān)節(jié),因此與其他關(guān)節(jié)相比,它承受的負(fù)載較小,因此需要一點(diǎn)動力來操作它。

鋸片切割機(jī)
鋸片切割器用于切割椰子果實(shí)的莖部以進(jìn)行收獲,它配有一個(gè)繼電器模塊來打開和關(guān)閉這個(gè)
刀具。


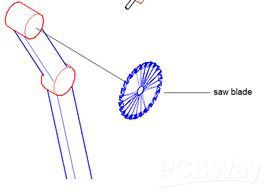
相機(jī)定位
攝像機(jī)定位由兩個(gè)伺服電機(jī)(MG960)控制,每個(gè)伺服電機(jī)負(fù)責(zé)左右和上下的角度位置。借助連接在機(jī)械臂上的無線攝像頭,將攝像頭捕獲/視頻輸出傳輸?shù)?a target='_blank' class='arckwlink_none'>手機(jī),它可以幫助收割機(jī)在較低的地面位置保持清晰的視野。


組件/材料清單:
PCB WAY-印刷電路板X1
Arduino 超級 X1
Nrf24l01 X1
2 針接線端子 X8
4 針接線端子 X6
女頭和男頭
A4988步進(jìn)驅(qū)動器X1
1000uf/16V 電容 X1
470uf/35V 電容 X1
TB6600 步進(jìn)驅(qū)動器 X3
BTS760電機(jī)驅(qū)動器X1
L298N電機(jī)驅(qū)動器X1
LM2596 降壓轉(zhuǎn)換器 X1
300W升壓轉(zhuǎn)換器X1
加載組件:
TAKANAWA直流減速電機(jī)X2
伺服電機(jī) (MG966) X2
555直流電機(jī)X1
NEMA 17 步進(jìn)電機(jī) X4
我開發(fā)了故障安全系統(tǒng):如果發(fā)生短路或斷開連接,椰子收獲機(jī)將自動下降,因此機(jī)器不會卡在樹上。我計(jì)劃建造整臺機(jī)器并在 Coconut 領(lǐng)域進(jìn)行測試。
很快你就會看到它在幫助我們的椰子收割機(jī),爬到樹上,收獲很多椰子樹。
代碼
GOOGLE 驅(qū)動所有文件(發(fā)射器和接收器的示意圖、Arduino 代碼、發(fā)射器和接收器的 PCB GERBER 文件。)
?
- 基于Arduino的無線椰子收割機(jī) 0次下載
- Nerd無線電子寵物開源設(shè)計(jì)
- 無線電控制車開源項(xiàng)目
- 解析無線電偽碼測目標(biāo)距離系統(tǒng)的設(shè)計(jì) 0次下載
- 軟件無線電基礎(chǔ) 51次下載
- 谷物聯(lián)合收割機(jī)電控全液壓轉(zhuǎn)向系統(tǒng)建模與仿真 9次下載
- 自動控制技術(shù)在農(nóng)業(yè)上有什么樣的應(yīng)用 4次下載
- 軟件無線電RFID測試平臺課件下載 32次下載
- 如何實(shí)現(xiàn)軟件無線電臺的組網(wǎng)方案設(shè)計(jì) 13次下載
- 基于單片微處理器在聯(lián)合收割機(jī)監(jiān)測系統(tǒng)上的應(yīng)用 11次下載
- 收割機(jī)倒車影像系統(tǒng)方案詳解 28次下載
- 單片微處理器在聯(lián)合收割機(jī)監(jiān)測系統(tǒng)上的應(yīng)用 18次下載
- 甘蔗收割機(jī)液壓系統(tǒng)最優(yōu)控制規(guī)律的設(shè)計(jì)
- HC11無線電控制器在RDS譯碼方面的軟件介紹
- 單片微處理器在聯(lián)合收割機(jī)監(jiān)測系統(tǒng)上的應(yīng)用
- 斷電控制器怎么調(diào) 457次閱讀
- 無線電時(shí)鐘的dcf信號是什么意思 818次閱讀
- 廚房內(nèi)的無線電源解決方案 640次閱讀
- 電機(jī)控制器電控系統(tǒng)的作用 963次閱讀
- 焦耳偷盜電路原理圖 1519次閱讀
- 軟件無線電安全之GNU Radio基礎(chǔ)知識 4946次閱讀
- 什么是無線電頻譜 最全最新無線通信頻率分配 9647次閱讀
- 兩種常見無線電架構(gòu)對比 939次閱讀
- 基于無線電技術(shù)實(shí)現(xiàn)基站接收天線感應(yīng)系統(tǒng)的設(shè)計(jì) 7476次閱讀
- 無線電信號的發(fā)送和接收 1.5w次閱讀
- 帶你了解無線電遙控技術(shù) 1w次閱讀
- 軟件無線電架構(gòu)的詳細(xì)概述 1.6w次閱讀
- 基于Zedboard的開源軟件定義無線電設(shè)備——Panoradio 6662次閱讀
- 基于FPGA的軟件無線電平臺設(shè)計(jì)詳細(xì)教程 3694次閱讀
- 基于SDR技術(shù)的無線電設(shè)計(jì)方法 1642次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DD3118電路圖紙資料
- 0.08 MB | 1次下載 | 免費(fèi)
- 2AD庫封裝庫安裝教程
- 0.49 MB | 1次下載 | 免費(fèi)
- 3PC6206 300mA低功耗低壓差線性穩(wěn)壓器中文資料
- 1.12 MB | 1次下載 | 免費(fèi)
- 4網(wǎng)絡(luò)安全從業(yè)者入門指南
- 2.91 MB | 1次下載 | 免費(fèi)
- 5DS-CS3A P00-CN-V3
- 618.05 KB | 1次下載 | 免費(fèi)
- 6海川SM5701規(guī)格書
- 1.48 MB | 次下載 | 免費(fèi)
- 7H20PR5電磁爐IGBT功率管規(guī)格書
- 1.68 MB | 次下載 | 1 積分
- 8IP防護(hù)等級說明
- 0.08 MB | 次下載 | 免費(fèi)
本月
- 1貼片三極管上的印字與真實(shí)名稱的對照表詳細(xì)說明
- 0.50 MB | 103次下載 | 1 積分
- 2涂鴉各WiFi模塊原理圖加PCB封裝
- 11.75 MB | 89次下載 | 1 積分
- 3錦銳科技CA51F2 SDK開發(fā)包
- 24.06 MB | 43次下載 | 1 積分
- 4錦銳CA51F005 SDK開發(fā)包
- 19.47 MB | 19次下載 | 1 積分
- 5PCB的EMC設(shè)計(jì)指南
- 2.47 MB | 16次下載 | 1 積分
- 6HC05藍(lán)牙原理圖加PCB
- 15.76 MB | 13次下載 | 1 積分
- 7802.11_Wireless_Networks
- 4.17 MB | 12次下載 | 免費(fèi)
- 8蘋果iphone 11電路原理圖
- 4.98 MB | 6次下載 | 2 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191390次下載 | 10 積分
- 5十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81588次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65989次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論